10
со
iujdyi
Фиг.1
Изобретение относится к машиностроению, в частности к промышленным роботам, и может найти применение для автоматизации технологических процессов, где требуются промежуточные точки позиционирования рабочего органа.
Цель изобретения - расширение технологических возможностей путем обеспечения позиционного перемещения рабочего органа.
На фиг. 1 изображен модуль манипулятора, разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - вид В на фиг. 1.
Модуль манипулятора состоит из силового цилиндра, в корпусе I которого может совершать в вертикальном направлении поступательное движение полый поршень 2, растягивая пружину 3 под действием сжатого воздуха, поступающего по каналу 4 в нижней крышке 5 и вниз.
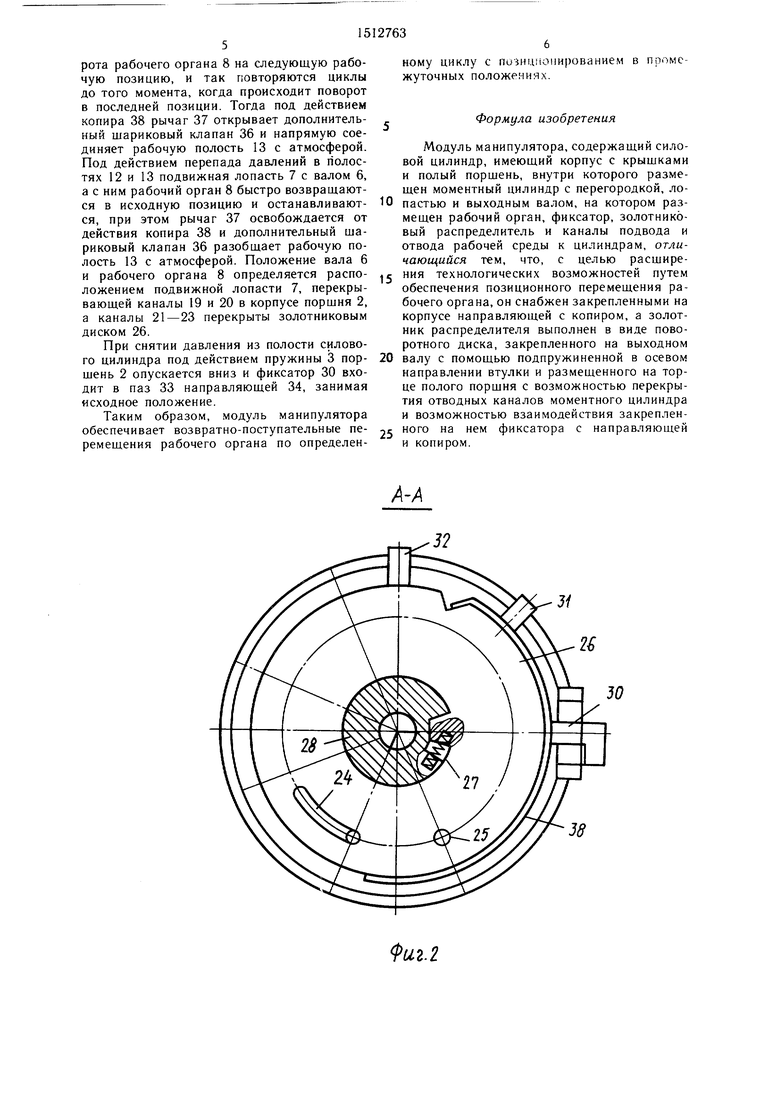
В поршне 2 установлен выходной вал 6 с возможностью совместного поворота с закрепленной на нем подвижной лопастью 7 и рабочим органом 8. Подвижная лопасть совместно с неподвижной перегородкой 9 и крышками 10 и 11 образуют в поршне 2 рабочие полости 12 и 13 моментного цилиндра, соединенные через каналы 14-16 и клапаны 17 и 18 с магистралью нагнетания, а через каналы 19-23, паз 24 и отверстие 25 в золотниковом диске 26 распределителя - с атмосферой. Золотниковый диск 26 через пружину 27 и втулку 28 (фиг. 2) закреплен на валу 6 с возможностью осевого пере- мешения и прижимается пружиной 29 к торцу поршня 2, а фиксаторы 30-32 установлены на диске 26 с возможностью поочередного вхождения в паз 33 направляющей 34, укрепленной на корпусе I силового цилиндра.
В верхней части направляющей 34 установлен подпружиненный копир 35, не препятствующий перемешению одного из фиксаторов 30-32 вниз по пазу 33 направляющей 34, но при движении вверх в конце хода один из фиксаторов 30-32 доворачивает золотниковый диск 26 на угол, обеспечивающий поочередное перекрытие каналов 19-23. Крайний канал 19 увеличенного сечения имеет дополнительный клапан 36, служащий для осуществления ускоренного реверса вала 6 с рабочим органом 8 за счет прямого соединения рабочей полости 13 с атмосферой посредством рычага 37, приводимого в действие копиром 38, расположенным на золотниковом диске 26.
Модуль манипулятора работает следующим образом.
Исходным является положение, когда поршень 2 с валом 6 и рабочим органом 8 находится в нижнем положении, подвижная лопасть 7 находится в пазу 33 направляющей 34 и удерживает золотниковый диск 26 а с ним вал 6 и рабочий орган 8 от проворачи0
вания. Золотниковый диск 26 при этом перекрывает выпускные каналы 21-23 и оставляет каналы 19 и 20 соединенными с атмосферой, но эти каналы в исходной позиции
перекрыты подвижной лопастью 7 и, таким образом, рабочие полости 12 и 13 полностью изолированы от атмосферы.
При подаче сжатого воздуха в полость силового цилиндра через канал 4 в крыш-. ке 5 поршень 2 с рабочим органом 8 начинает перемещаться вверх и перемещает фиксатор 30 по пазу 33 направляющей 34. При касании, в процессе перемещения вверх, фиксатором 30 копира 35 происходит под действием его наклона перемещение фикса5 тора 30, а вместе с ним и золотникового дика 26 при сжимании пружины 27 на угол, обеспечивающий перекрытие каналов 19 и 20 и соединенные канала 21 с атмосферой. В результате таких действий в рабочей полости 12 падает давление и клапан 17 перекрывает канал 15, а канал 16 остается открытым для потока сжатого воздуха и обратный клапан 18 не препятствует поступлению сжатого воздуха в рабочую полость 13 позиционеров. Лопасть 7 начинает повора5 чиваться в направлении открытого канала 21 и постепенно перекрывает его, одновременно через втулку 28 поворачивается золотниковый диск 26 и становится в положение следующей позиции, при этом подвижная лопасть 7 перекрывает каналы 20 и 21,
0 а каналы 19, 22 и 23 перекрыты золотниковым диском 26. Таким образом, золотниковый диск 26, поворачиваясь под действием направляющей 34, через фиксаторы 30-32 с помощью паза 24 и отверстия 25 соединяет поочередно попарно каналы 19-23 с атмос5 ферой, обеспечивая позиционирование лопасти 7.
В положении, когда порщень 2 поднят в верхнее положение и лопасть 7, а с ней вал 6 и рабочий орган 8 занимают определенную
0 позицию, рабочий орган находится до тех пор, пока в полость силового цилиндра подается сжатый воздух. Клапан 17 при этом занимает нейтральное положение и равное давление в рабочих полостях 12 и 13 и удерживает подвижную лопасть 7, а с ней
5 вал 6 и рабочий орган 8 от проворачивания. По команде системы управления (не показана) происходит отключение сжатого воздуха и канал 4 соединяется с атмосферой. Под действием пружины 3 воздух вытесняется в атмосферу, поршень 2 опускается в
нижнее положение и уже следующий фиксатор 31 входит в паз 33 направляющей 34, обеспечивая точное позиционирование рабочего органа 8 робота на протяжении его перемещения вниз.
В нижнем крайнем положении порщня 2 по команде системы управления сжатый воздух подается в полость силового цилиндра. Начинается следующий цикл подъема и поворота рабочего органа 8 на следующую рабочую позицию, и так повторяются циклы до того момента, когда происходит поворот в последней позиции. Тогда под действием копира 38 рычаг 37 открывает дополнительный шариковый клапан 36 и напрямую соединяет рабочую полость 13 с атмосферой. Под действием перепада давлений в полостях 12 и 13 подвижная лопасть 7 с валом 6, а с ним рабочий орган 8 быстро возвращаются в исходную позицию и останавливаются, при этом рычаг 37 освобождается от действия копира 38 и дополнительный шариковый клапан 36 разобшает рабочую полость 13 с атмосферой. Положение вала 6 и рабочего органа 8 определяется распо- с ложением подвижной лопасти 7, перекрывающей каналы 19 и 20 в корпусе поршня 2, а каналы 21-23 перекрыты золотниковым диском 26.
При снятии давления из полости силово10
ному циклу с позиционированием в промежуточных положениях.
Формула изобретения
Модуль манипулятора, содержащий силовой цилиндр, имеющий корпус с крышками и полый поршень, внутри которого размещен моментный цилиндр с перегородкой, лопастью и выходным валом, на котором размещен рабочий орган, фиксатор, золотниковый распределитель и каналы подвода и отвода рабочей среды к цилиндрам, отличающийся тем, что, с целью расширения технологических возможностей путем обеспечения позиционного перемещения рабочего органа, он снабжен закрепленными на корпусе направляющей с копиром, а золотник распределителя выполнен в виде поворотного диска, закрепленного на выходном
го цилиндра под действием пружины 3 пор- 20 валу с помощью подпружиненной в осевом
щень 2 опускается вниз и фиксатор 30 входит в паз 33 направляющей 34, занимая исходное положение.
Таким образом, модуль манипулятора
направлении втулки и размещенного на торце полого порщня с возможностью перекрытия отводных каналов моментного цилиндра и возможностью взаимодействия закрепленобеспечивает возвратно-поступательные пе- - ного на нем фиксатора с направляющей ремещения рабочего органа по определен- и копиром.
ному циклу с позиционированием в промежуточных положениях.
Формула изобретения
Модуль манипулятора, содержащий силовой цилиндр, имеющий корпус с крышками и полый поршень, внутри которого размещен моментный цилиндр с перегородкой, лопастью и выходным валом, на котором размещен рабочий орган, фиксатор, золотниковый распределитель и каналы подвода и отвода рабочей среды к цилиндрам, отличающийся тем, что, с целью расширения технологических возможностей путем обеспечения позиционного перемещения рабочего органа, он снабжен закрепленными на корпусе направляющей с копиром, а золотник распределителя выполнен в виде поворотного диска, закрепленного на выходном
валу с помощью подпружиненной в осевом
направлении втулки и размещенного на торце полого порщня с возможностью перекрытия отводных каналов моментного цилиндра и возможностью взаимодействия закреплен ного на нем фиксатора с направляющей и копиром.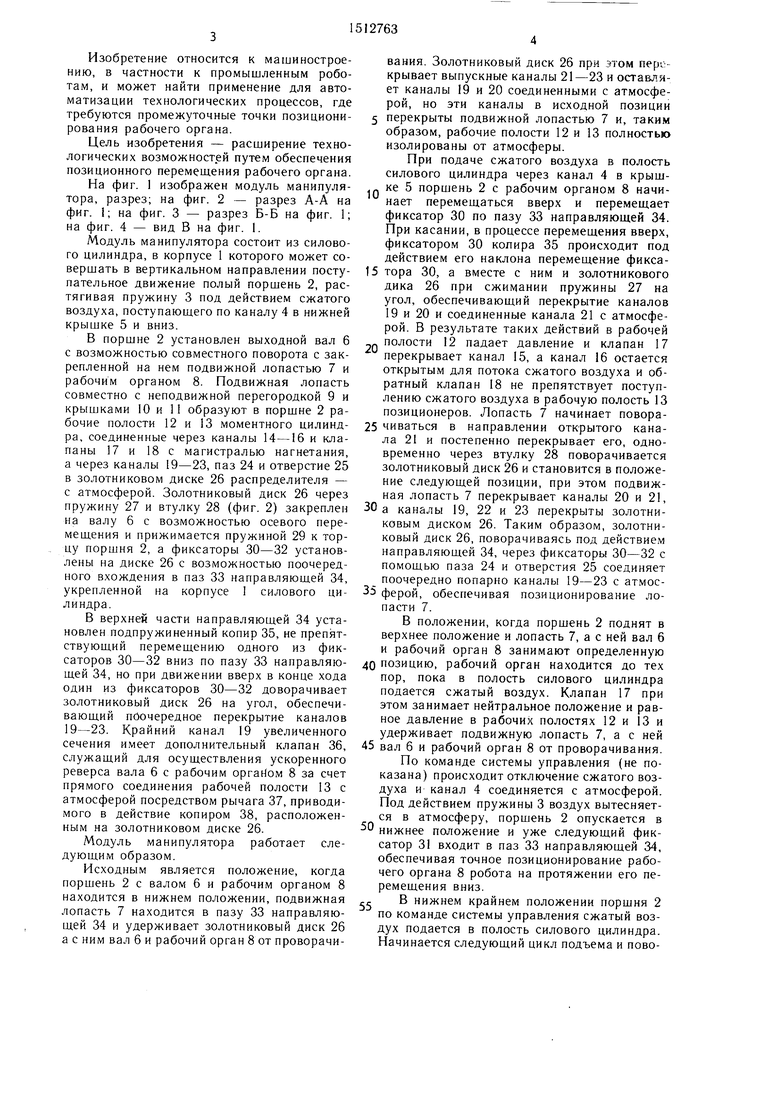
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для изменения степени сжатия поршневого двигателя внутреннего сгорания | 1991 |
|
SU1782291A3 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| Механизм шагового перемещения по направляющей | 1990 |
|
SU1801853A1 |
| Задвижка | 1985 |
|
SU1359540A2 |
| Устройство для дозирования вязких продуктов в тару | 1989 |
|
SU1726312A1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ПЛАСТА | 1989 |
|
SU1818896A1 |
| Зуботехническая пила | 1989 |
|
SU1648442A1 |
| Бесшатунный поршневой двигатель с модульным отключением цилиндров | 2024 |
|
RU2840585C1 |
| КОДОВЫЙ ЗАМОК - Н | 1995 |
|
RU2120531C1 |
| Позиционный пневмогидропривод | 1985 |
|
SU1273656A1 |

Изобретение относится к области машиностроения, в частности к промышленным роботам. Цель изобретения - повышение технологических возможностей путем обеспечения позиционного перемещения рабочего органа. Модуль манипулятора содержит силовой цилиндр, имеющий корпус 1 с крышками 5, 10, 11 и полым поршнем 2, внутри которого размещен моментный цилиндр с перегородкой 9, лопастью 7 и выходным валом 6, на котором закреплен рабочий орган 8. Золотник распределителя выполнен в виде поворотного диска 26, закрепленного на валу 6 с помощью подпружиненной втулки 28, и размещен на торце поршня 2 с возможностью перекрытия обводных каналов 21 моментного цилиндра и взаимодействия закрепленного на нем фиксатора 30 с направляющей и копиром. 4 ил.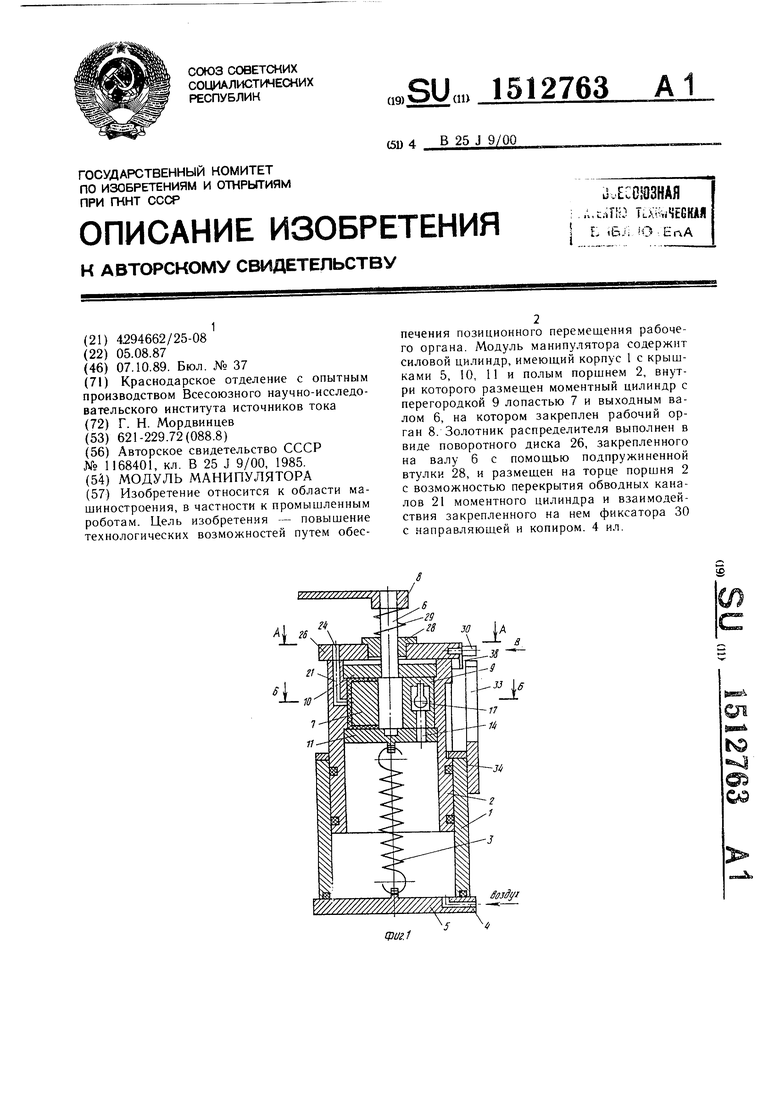
31
26
38
иг.2
19
36
| Модуль движения робота | 1983 |
|
SU1168401A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
