Изобретение относится к кривошипно- шатунным механизмам, обеспечивающим прямолинейное движение выходного звена, и может быть использовано в машиностроении.
Цель изобретения - повышение точности механизма.
На чертеже представлена схема криво- шипно-шатунного прямолинейно-направляю|щего механизма.
Кривошипно-шатунный прямолинейно-направляющий механизм содержит основание
1,установленные на нем двуплечие коромысло 2 и кривошип 3, шарнирно связанный с одной вершиной шатуна 4, выполненного в виде треугольного замкнутого контура, стержень 5, шарнирно связанный с другой вершиной шатуна 4, а также одним своим концом с одним плечом коромысла
2,тягу б, одним концом шарнирно свя- чанную с другим плечом коромысла 2, а другим - с третьей вершиной шатуна 4.
Перемещение конца стержня 5 по прямой обеспечивается при следующих относительных размерах звеньев механизма ,89; ,28; ,78; ,33; ,11; ,il; ,89; .
Кривошипно-шатунный прямолинейно- направляющий механизм работает следующим образом.
При повороте кривошипа 3 движение посредством шатуна 4, тяги 6 и коромысла 2 передается на стержень 5, конец которого за первую половину оборота кривошипа 3 перемещается по прямой из одного крайнего положения в другое. При последующем повороте кривошипа конец стержня ° 5 перемещается в обратном направлении по траектории, отличной от прямой, и по завершении полного оборота кривошипа 3 возвращается в исходную точку.
15
Формула изобретения
Кривошипно-шатунный прямолинейно- направляющий механизм, содержащий основание, установленное на нем коромысло, одним концом шарнирно связанный с ним 0 стержень, кривошип и шатун, одним концом шарнирно связанный с кривошипом, а другим - со стержнем, отличающийся тем, что, с целью повышения точности механизма, коромысло выполнено двуплечим, шатун - в виде треугольного замкнутого контура, а механизм снабжен тягой, один конец которой шарнирно связан с вторым плечом коромысла, а второй - с третьей вершиной шатуна.
5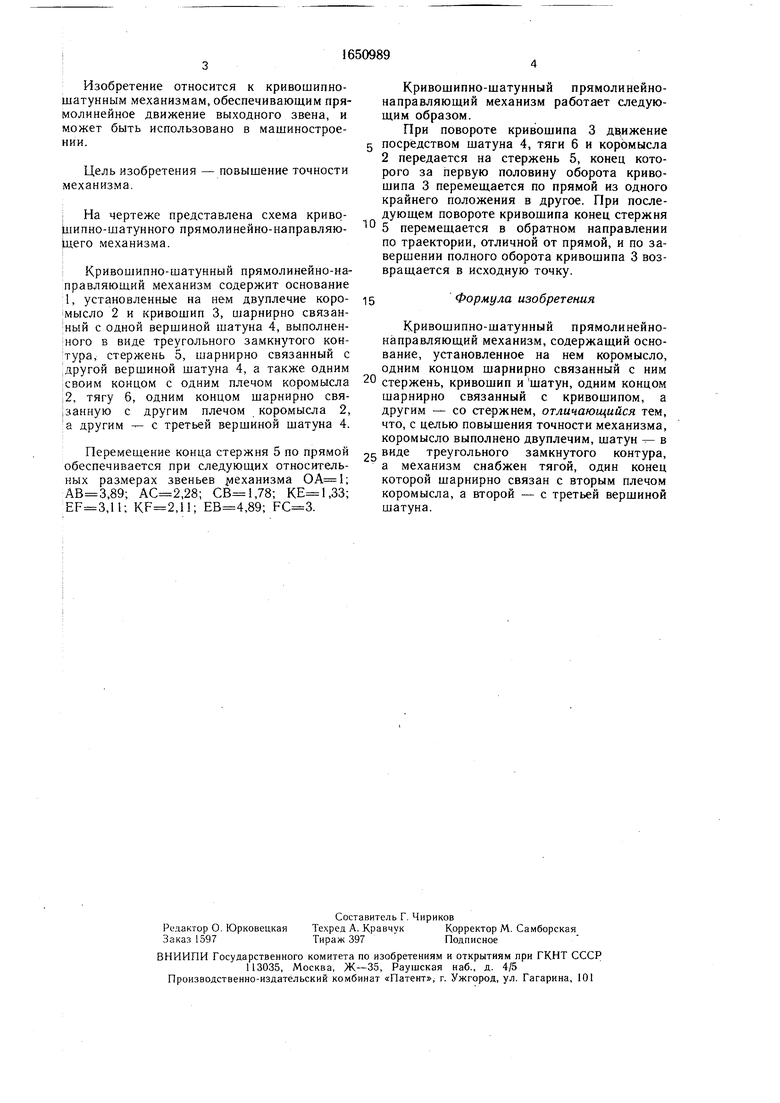
| название | год | авторы | номер документа |
|---|---|---|---|
| Прямолинейно-направляющий механизм | 1990 |
|
SU1820099A1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1996 |
|
RU2110718C1 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2331507C1 |
| ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 1991 |
|
RU2006725C1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1998 |
|
RU2149298C1 |
| Дезаксиальный кривошипно-ползунный механизм | 1989 |
|
SU1747775A1 |
| МЕХАНИЗМ ТРАНСПОРТИРОВАНИЯ ТКАНИ ШВЕЙНОЙ МАШИНЫ (2 ВАРИАНТА) | 2004 |
|
RU2281352C1 |
| Стержневой манипулятор | 1989 |
|
SU1641605A1 |
| МЕХАНИЗМ ТРАНСПОРТИРОВАНИЯ ТКАНИ ШВЕЙНОЙ МАШИНЫ (ВАРИАНТЫ) | 2004 |
|
RU2284384C2 |
Изобретение относится к машиностроению. Цель изобретения - повышение точности механизма. При вращении кривошипа 3 конец стержня 5 за первый полуоборот перемещается из одного крайнего положения в другое по прямой линии, а за второй полуоборот возвращается в исходное положение по другой траектории. 1 ил. Ш (Л О5 ел о СО 00 Ј
| Юдин В | |||
| А., Петрокас П | |||
| В | |||
| Теория механизмов и машин.-М.: Высшая школа, 1977, с | |||
| Веникодробильный станок | 1921 |
|
SU53A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
