Изобретение относится к перегрузочной технике, транспортным средствам для перемещения штучных грузов с одного уровня на другой и может быть использовано, например, в моечных машинах для сельскохозяйственных плодов.
Целью изобретения является повышение сохранности изделий.
На фиг. 1 изображена кинематическая схема устройства многоступенчатого исполнения; на фиг. 2 - кинематическая схема устройства одноступенчатого исполнения; на фиг. 3 - траектория перемещения свободного конца шатуна кривошипно-коромысло- вого механизма; на фиг. 4 - устройство, вид сверху; на фиг. 5 - разрез А-А на фиг. 4.
Устройство для перегрузки штучных предметов включает неподвижную и подвижную рамы 1 и 2 со ступенчатыми перегрузочными элементами 3 и 4 соответственно. Перегрузочные элементы 3 скреплены между собой в неподвижной раме 1 посредством втулок 5 с обеспечением равных зазоров между элементами (фиг. 5). Таким же образом скреплены между собой перегрузочные элементы 4 подвижной рамы 2.
Внутренняя поверхность неподвижной рамы 1 является копиром 6, и подвижная рама 2 снабжена роликом 7, взаимодействующим с копиром.
Спаренный кривошипно-коромысло- вый механизм 8 содержит пары звеньев: кривошипов 9, шатунов 10 и коромысел 11, расположенных с боковых сторон рамы 2.
Кривошипы 9 шарнирно с возможностью вращения от привода (не показан) закреплены на основании 12.
Шатуны 10 скреплены шарнирно с кривошипами 9, коромыслами 11 и рамой 2. Коромысла 11 шарнирно закреплены на основании 12.
Соотношение длин звеньев кривошип- но-коромыслового механизма 8 обеспечивает перемещение свободных концов Б шатунов 10 по замкнутой траектории, рабочие участки которой приближаются к вертикальной dc и горизонтальной се прямым, причем величина участка dc превышает расстояние между опорными поверхностями элементов 3, а величина участка се равна длине опорных поверхностей элементов.
Подвижная рама 2 подвешена шарнирно над центром ее тяжести на свободных концах Б шатунов 10 с возможностью перемещения элементов 4 рамы в зазорах перегрузочных элементов 3 неподвижной рамы 1.
Неподвижная рама 1 жестко установлена на основании 12.
Пример. Неподвижная рама 1 перегрузочного устройства установлена на основании 12 и снабжена нижним и верхним одинаковыми по конструкции перегрузочными элементами 3, которые скреплены в раме распорными втулками 5 с одинаковыми зазорами между элементами.
Подвижная рама 2 снабжена пакетом перегрузочных элементов 4, выполненных
0 Г-образ ной формы и скрепленных между собой втулками 5 с одинаковыми зазорами между элементами.
Кривошипно-коромысловый механизм 8 содержит пары звеньев: кривошипов 9,
5 шатунов 10 и коромысел 11, расположенных с боковых сторон рамы 2. Кривошипы 9 шарнирно с возможностью вращения от привода (не показан) закреплены к основанию 12. Шатуны 10 скреплены шарнирно с кривоши0 пами 9, коромыслами 11 и рамой 2. Коромысла 1 1 шарнирно закреплены к основанию 12 и соединены с шатунами 10. Соотношение длин звеньев кривошип- но-коромыслового механизма 8 выбрано с
5 обеспечением перемещения свободных концов Б шатунов 10 по замкнутой траектории, рабочие участки которой приближаются к вертикальной dc и горизонтальной се прямым, причем величина участка dc превы0 шает расстояние между опорными поверхностями верхнего и нижнего элементов 3, а величина участка се равна длине опорных поверхностей элементов 3.
Подвижная рама 2 подвешена шарнир5 но над центром ее тяжести на свободных концах Б шатунов 10с возможностью перемещения элементов 4 рамы в зазорах перегрузочных элементов 3 неподвижной рамы 1.
0 Средняя пластина нижнего перегрузочного элемента 3 выполнена в виде копира б с опорной поверхностью повторяющей по форме рабочие участки dc и се траектории свободного конца Б шатуна 10 механизма 8.
5 Подвижная рамэ 2 снабжена опорным роликом 7 с возможностью взаимодействия с копиром 6 неподвижной рамы и обеспечения горизонтального положения опорной поверхности перегрузочных элементов 4
0 подвижной рамы 2 при перемещении ее на рабочих участках dc и се траектории конца Б шатуна 10.
К основанию 12 шарнирно закреплены кривошипы 9 и коромысла 11, свободные
5 концы которых шарнирно соединены соответственно с концами и серединами шатунов 10 спаренного кривошипно-коромыслового механизма 8.
К свободным концам Б шатунов 10 шарнирно над ее центром тяжести подвешена
подвижная рама 2, содержащая перегрузочные элементы 4 Г-обраэной формы, выполненные в еиде пластин, скрепленные между собой с равными зазорами посредством распорных втулок 5. Средний перегрузом- ный элемент 3 нижнего пакета выполнен в виде копира б, взаимодействующего с роликом 7, установленным на подвижной раме 2.
Устройство работает следующим образом.
Перегружаемые предметы {не показаны) подаются на нижнюю опорную поверхность перегрузочных элементов 3 неподвижной рамы 1 В исходном положении опорная поверхность 3 перегрузочных элементов 4 по- движной рамы 2 расположена ниже опорной поверхности Г. Посредством привода (не показан/ кривошипы S приводят в синхронное враидэние. При этом коромысла 11 совершают колебатеоьное движение. 8 момент начала вращения кривошипов 9 опорная поверхность В расположена на уравче точки d (фиг. 3), затем при перемещении вверх по рабочему участку траектории dc перегрузочные элементы 4 проходят в зазоры между перегрузочными элементами 3, опорной поверхностью В, снимают предметы с нижней опорной поверхности Г, поднимают их вверх до уровня точки с вертикального участка траектории dc, перемещаются горизон- тально по участку траектории се. на уровне точки е входят в зазоры между перегрузочными элементами 3 верхней ступени и перекладывают при этом предметы с опорной поверхности В на вышележащую опорную поверхность Г. От точки е до точки d траектории опорная поверхность В перемещается вниз без предметов (холостой участок траектории). Описанный цикл совершается за полный оборот кривошипов 9. Горизон- тельное положение опорной поверхности В на участках dc и се траектории обеспечивается взаимодействием ролика 7 с поверхностями D и Е копира 6, а на холостом участке
ed - подвеской подвижной рамы 2 к свободным концам шатунов 10 над центром тяжести рамы.
Таким образом за каждый оборот кривошипа 9 осуществляют перегрузку предметов с нижерасположенных опорных поверхностей на смежные вышерасположенные элементы 3.
Для перегрузки предметов с нижней на верхнюю опорную поверхность элементов 3 устройства, изображенного на фиг. 1, кривошипы совершают три полных оборота.
Изменением направления вращения кривошипов на противоположное обеспечивают перегрузку предметов с верхней опорной поверхности на нижнюю опорную поверхность элементов 3.
Формула изобретения Устройство для перегрузки штучных изделий, содержащее неподвижные, установленные наосновании,иподвижныепо вертикали ступенчатые рамы, размещенные в вертикальных параллельных плоскостях и имеющие опорные полки на ступенях, механизм вертикального перемещения рам по замкнутой траектории в вертикальной плоскости для сьема изделий с одних опорных полок неподвижных рам и передачи их на другие, включающий в себя приводной кривошип, отличающееся тем, что, с целью повышения сохранности изделий, механизм перемещения подвижных рам снабжен по крайней мере одним коромыслом и по крайней мере одним шатуном, последний из которых шарнирно соединен с подвижными рамами и подвешен на упомянутом коромысле, которое шарнирно связано с основанием, а ролики подвижных рам закреплены по крайней мере на вертикальном участке ступени одной из них с возможностью контактирования с внутренней поверхностью вертикального участка ступени соответствующей неподвижной рамы.
ТтТЯ
fui.t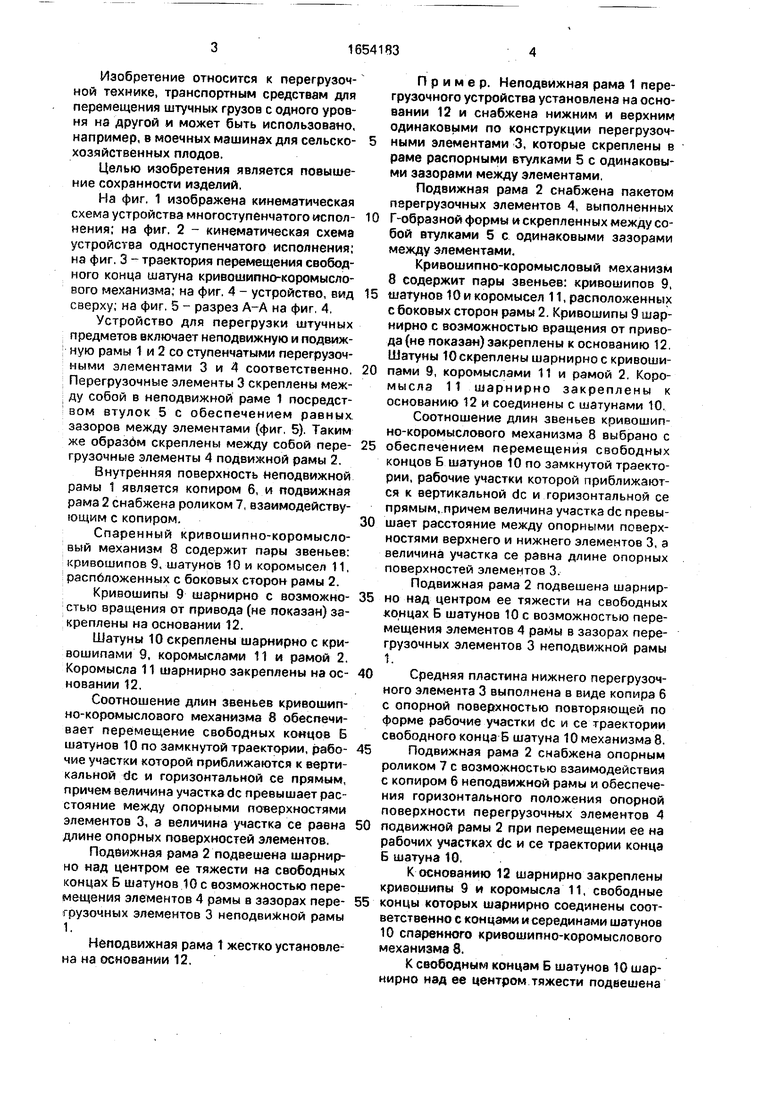
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ДЛЯ РЕЗКИ ПЛАСТИЧНОГО БРУСА | 2015 |
|
RU2581434C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2193963C1 |
| ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ | 1995 |
|
RU2088061C1 |
| МАШИНА ДЛЯ НАПОЛНЕНИЯ БАНОК ПРОДУКТОМ | 2001 |
|
RU2224695C2 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2331507C1 |
| Механизм привода нижней плиты печатно-позолотного пресса | 1984 |
|
SU1279862A1 |
| Магазин корабельной артиллерийской установки | 2014 |
|
RU2607700C2 |
| КУЛЬТИВАТОР | 1995 |
|
RU2090025C1 |
| Трафаретная печатная машина | 1981 |
|
SU1014763A1 |
| Устройство для извлечения или укладки бутылок в ящик | 1989 |
|
SU1705192A1 |
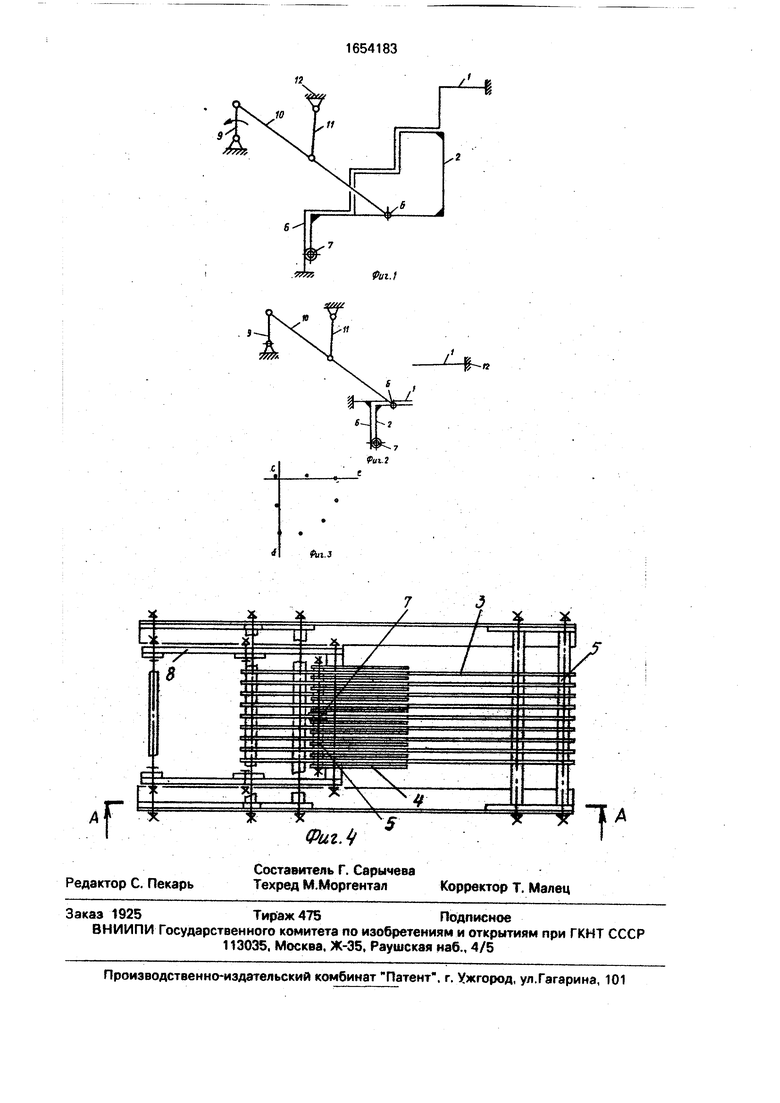
Изобретение относится к транспортной технике и может быть использовано в моечных машинах для сельскохозяйственных плодов. Целью изобретения является повышение сохранности изделий. Устройство содержит неподвижную и подвижную рамы 1 и 2 со ступенчатыми перегрузочными элементами, которые установлены с продольными зазорами посредством распорных втулок. Неподвижная рама 1 снабжена копиром 6, а подвижная рама -роликом 7, взаимодействующим с копиром. Спаренный кривошип- но-коромысловый механизм содержит пары звеньев: кривошипов 9, шатунов 10 и коромысел 11, расположенных с боковых сторон рамы 2, которая подвешена шарнирно на свободных концах шатунов 10 над центром тяжести рамы. Кривошипы 9 шарнирно с возможностью вращения от привода прикреплены к основанию 12. Кинематическая схема кривошипно-коромыслового механизма обеспечивает перемещение свободных концов шатунов по замкнутой траектории, рабочие участки которой приближаются к вертикальной и горизонтальной прямым. Причем величина рабочего участка вертикальной прямой превышает расстояние между опорными поверхностями перегрузочных элементов неподвижной рамы 1, а величина рабочего участка горизонтальной прямой равна длине опорных поверхностей элементов. При вращении кривошипов подвижная рема 2 перемещается по замкнутой траектории, причем ее перегрузочные элементы перемещаются в зазорах перегрузочных элементов неподвижной рамы, и перегружают из- депия между опорными поверхностями элементов. 5 ил. А-А И сь ел Jb 00 Сд
Г
Фиг. Ч
.
