Изобретение относится к грузоподъемной технике и предназначено для использования при выгрузке длинномерных грузов со смещенным центром тяжести, преимущественно в стесненных условиях, где раскачивание груза недопустимо, например, из железнодорожных вагонов.
Целью изобретения является повышение безопасности труда стропальщиков путем осуществления подъема груза со смещенным центром тяжести без раскачивания и автоматического контроля застро- повки груза.
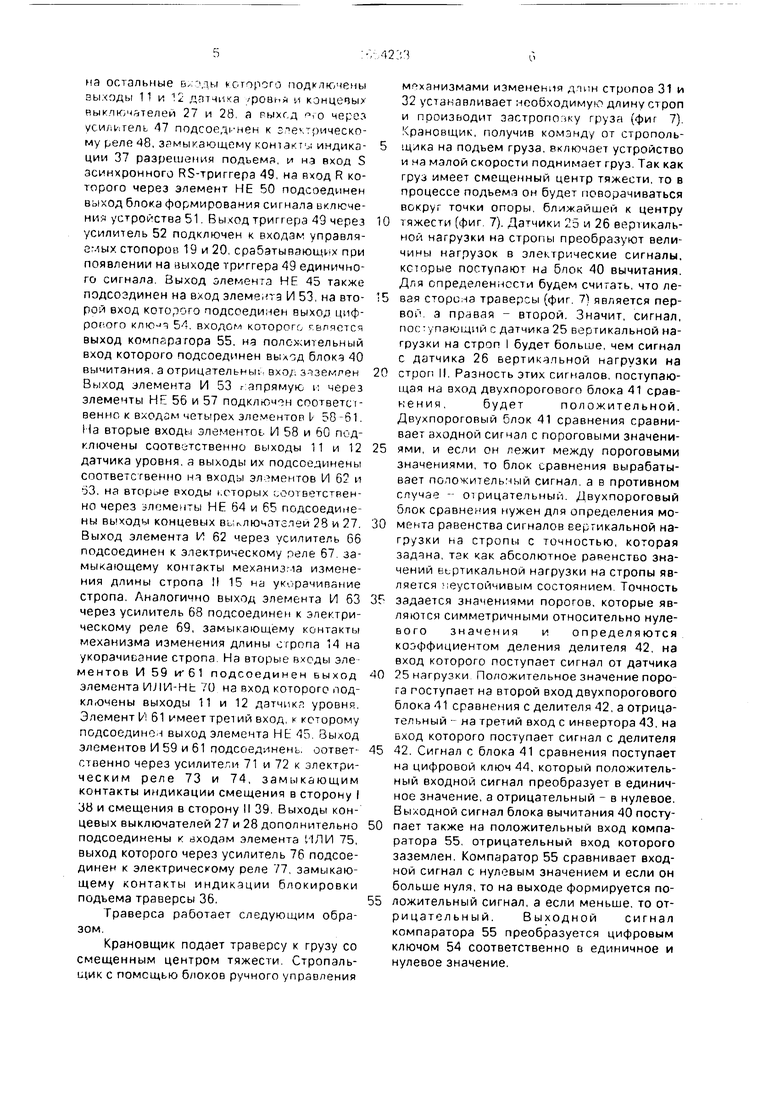
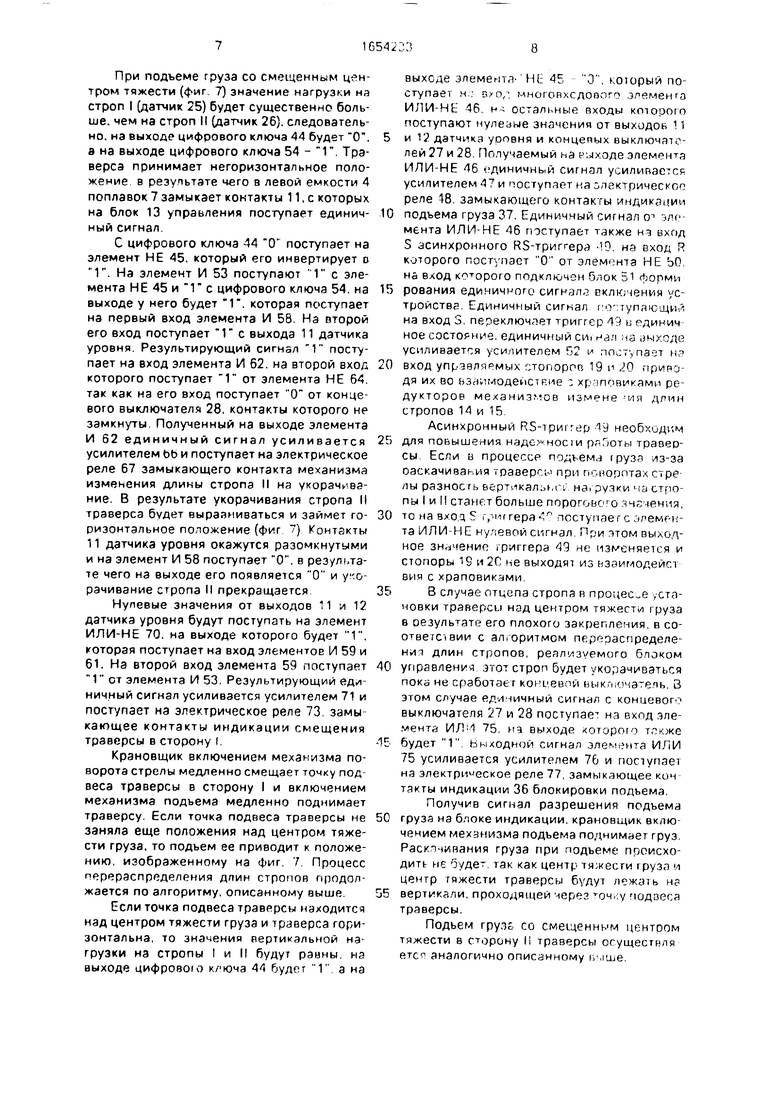
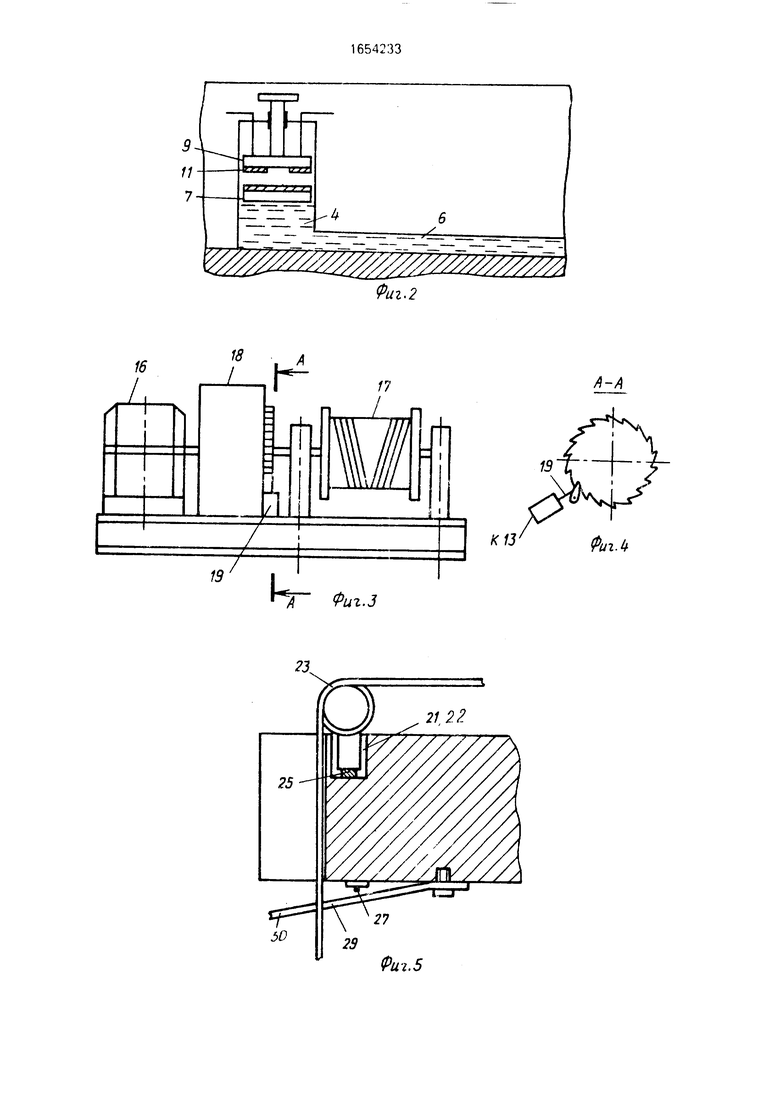
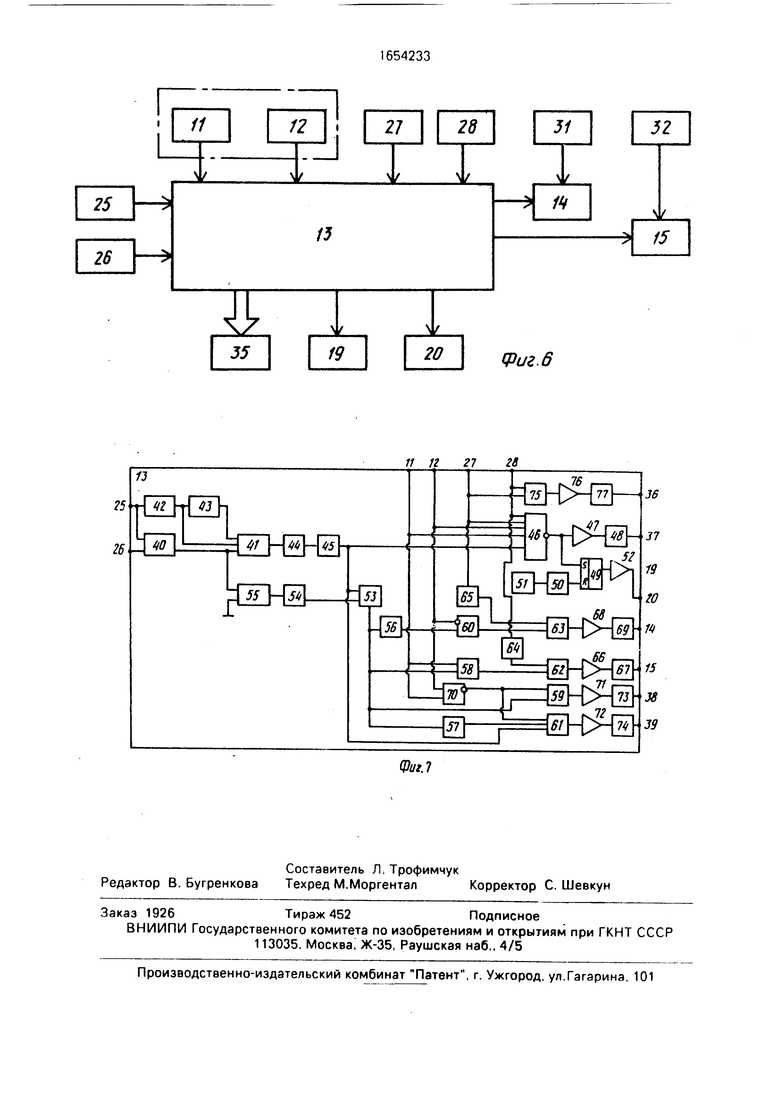
На фиг. 1 представлена траверса, общий вид; на фиг. 2 - датчик уровня; на фиг. 3 - механизм изменения длины стропа и управляемого стопора; на фиг. 4 - разрез А-А на фиг. 3; на фиг. 5 - датчик вертикальной нагрузки на стропы; на фиг. 6 - функциональная схема грузоподъемной траверсы, на фиг. 7 - функциональная схема блока управления.
Траверса содержит балку 1. которая с помощью тросов 2 и кольца 3 навешивается на грузозахватный орган крана. На балке располагается датчик уровня, состоящий из двух емкостей 4 и 5, соединенных трубкой 6 и заполненных жидкостью, на поверхности которой плавают поплавки 7 и 8 с верхней проводящей поверхностью. В верхней части емкостей на изолирующих площадках 9 и 10 расположены контакты 11 и 12, при замыкании которых поплавком на блок 13 управления поступает единичный сигнал. Высота расположения контактов изменяется регулировочным винтом, расположенным на крышке емкости. Механизмы изменения длин стропов 14 и 15 расположены симметрично на балке 1. Каждый из них состоит из привода 16, например электродвигателя, приводного барабана 17 для наматывания стропа и редуктора с храповиком 18. С храповиками механизмов изменения длин стропов 14 и 15 взаимодействуют управляемые стопоры 19 и 20, например, с электромагнитным приводом.
Управляемые стопоры 19 и 20 введены в устройство с целью повышения надежности работы и уменьшения грузоподъемности механизмов изменения длин стропов 14 и 15. В процессе установки траверсы над центром тяжести груза механизму изменения длины стропа приходится развивать нагрузку не более половины грузоподъемности траверсы При подъеме груза возможен обрыв или отцеп одного стропа, что вдвойне увеличивает нагрузку на механизм изменения длины стропа. Для того, чтобы не устанавливать на траверсе механизмов изменения длин стропов грузоподъемностью равной грузоподъемности траверсы и избежать сматывания стропа с механизма в аварийной ситуации, на каждом механизме изменения длин стропов устанавливается управляемый стопор, который при подъеме груза по сигналу блока 13 управления вступает во взаимодействие с храповиком 18 редуктора механизма изменения длины стропа.
0На краях балки 1 симметрично расположены стаканы 21 и 22, в которых устанавливается с возможностью вертикального перемещения блоки 23 и 24 для строп. На дне стаканов установлены датчики 25 и 26
5 вертикальной нагрузки на стропы, например тензодатчики. На нижней стороне бэл- ки 1 по краям расположены концевые выключатели 27 и 28, взаимодействующие с упругими пластинами 29 и 30, имеющими
0 вырезы дня пропускания стропов. При достижении пластины крюком или поднимаемым грузом оно воздействует на концевой выключатель, который при этом посылает единичный сигнал на блок 13 управления.
5 Для каждого механизма изменения длины стропа 14 и 15 на балке установлены блоки ручного управления этими механизмами 31 и 32. Они предназначены для установления первоначальной длины стропов, необходи0 мой для застроповки груза. Каждый из них может быть выполнен, например, в виде двух кнопочных выключатепей 33 и 34, подключенных к приводу 16, при нажатии на которые привод механизма изменения дли5 ны стропа работает на сматывание или наматывание стропа.
В кабине машиниста крана расположен блок 35 индикации, включающий в себя индикацию 36 блокировки подьема, индика0 цию 37 разрешения подьема, индикацию 38 смещения траверсы в сторону I и индикацию 39 смещения траверсы в сторону II.
Блок 13 управления включает в себя блок 40 вычитания, на положительный-вход
5 которого подсоединен выход датчика вертикальной нагрузки на стропы 25 а на отрицательный - выход датчика 26, двухпороговый блок 41 сравнения, на первый вход которого подсоединен выход блока 40 вычитания, а
0 на второй и третий входы, определяющие величины пороговых значений, подсоединены выход делителя 42 и инвертора 43. На вход ценителя 42 поступает сигнал сдатчика вертикальной нагрузки на стропы 25, а на
5 вход инвертора 43 - сигнал с делителя 42. Двухпороговый блок 41 сравнения подсоединен на вход цифрового ключа 44, выход которого подсоединен на вход элемента HF 45 Выход элемента НЕ 45 подсоединен на вход многовходового элемента ИЛИ-НБ 46.
на остальные ь, .ты югорого подключены 11 и 12 д-ттчи а ровни и концевых выключателей 27 и 28 а гыхгд «.о через усилитель 41 подсоединен к с еч рическп- му реле 48, замыкающему контакта индика- ции 37 разрешения подъема, и нэ вход S асинхронного RS-триггера 49, на вход R которого через элемент НЕ 50 подсоединен выход блока формирования сигнала включения устройства 51 Вькод триггера 49 через усилитель 52 подключен к входам управляемых стопоров 19 и 20, срабатывающих при появлении на выходе триггера 49 единичного сигнала Выход элемента НЕ 45 также подсоэдинен на элемент а И 53, на вто- рой вход которого подсоединен выход циф- pot Oro 54, входом которого гвлчетсч выход компаратора 55. нэ положительный вход которого подсоединен вы л од блока 40 вычитания, а отрицательны вход з-чземлен Выход элемента И 53 г апрямую и через элементы НЕ 56 и 57 подключен соответсг- веннг, к входам четырех элементов I 58-51 На вторые входы элементов И 58 и 60 подключены соответственно выходы 11 и 12 датчика уровня, а выходы их подсоединены соответственно нч входы элементов И 62 и 53, на вторые входы которых соответственно через элементы НЕ 64 и 65 подсоединены выходы концевых вь гчлючзтглеи 28 и 27. Выход элемента И 62 через усилитель 66 подсоединен к электрическому 67 замыкающему контакты механизма изменения длины стропа 15 на укорачивание стропа. Аналогично выход элемента И 63 через усилитель 68 подсоединен к электрическому реле 69, замыкающему контакты механизма изменения длины огропа 14 на укорачиьание стропа На вторые входы эле ментов И 59 подсоединен ьыход элемента l/lJIl/l-Ht 70 на вход которого подключены выходы 11 и 12 датчика уровня Элемент V 61 имеет третий вход, к которому подсоединен выход элемента Ht 45 Выход элементов И 59 и 61 подсоединена оответ- ственно через усилители 71 и 72 к электрическим реле 73 и 74, замыкающим контакты индикации смещения в сторону I 38 и смещения в сторону II 39. Выходы концевых выключателей 27 и 28 дополнительно подсоединены Y входам элемента ИЛИ 75, выход которого через усилитель 76 подсоединен к электрическому реле 77, замыкающему контакты индикации блокировки подъема траверсы 36.
Траверса работает следующим образом
Крановщик подает траверсу к грузу со смещенным центром тяжести Стропальщик с помощью блоков ручного управления
механизмами изменения дтин стропов 31 и 32 устанавливает необходимую длину строп и производит эастропо (ку грузя (фиг 7) Крановщик, получив команду от стропальщика на подъем груза, включает устройство и на малой скорости поднимает груз Так как rpyj имеет смещенный центр тяжести, то в процессе подъема он будет поворачиваться вокруг точки опоры, ближайшей к центру тяжести (фиг 7). Датчики 25 и 26 вертикальной нагрузки на стропы преобразуют величины нагрузок в электрические сигналы, которые поступают на блок 40 вычитания. Для определенности будем считать, что левая сторона траверсы (фиг 7 является пер- воГ1 а правая - второй. Значит, сигнал, поступающий с датчика 25 вертикальной нагрузки на строп I будет больше, чем сигнал с датчика 26 вертикальной нагрузки на строп II. Разность этих сигналов, поступающая Hd вход двухпорогового блока 41 сравнения,будетположительной. Двухпороговый блок 41 сравнения сравнивает входной сигнал с пороговыми значениями, и если он лежит между пороговыми значениями, то блок иравнения вырабатывает положительный сигнал а в противном случае - отрицательный Двухпороговый блок сравнения нужен для определения момента равенства сигналов вертикальной нагрузки на стропы с точностью, которая задчна, так как абсолютное равенство значений вертикальной нагрузки на стропы является 1,еустойчивым состоянием Точность задается значениями порогов, которые являются симметричными относительно нулевого значения и определяются коэффициентом деления делителя 42, на вход которого поступает сигнал от датчика 25 нагрузки Положительное значение порога поступает на второй вход двухпорогового блока 41 сравнения с делителя 42, а отрицательный - на третий вход с инвертора 43, на вход которого поступает сигнал с делителя 42. Сигнал с блока 41 сравнения поступает на цифровой ключ 44, который положительный входной сигнал преобразует в единичное значение, а отрицательный - в нулевое. Вьиодной сигнал блока вычитания 40 поступает также на положительный вход компаратора 55, отрицательный вход которого заземлен. Компаратор 55 сравнивает входной сигнал с нулевым значением и если он больше нуля, то на выходе формируется положительный сигнал, а если меньше, то отрицательный. Выходной сигнал компаратора 55 преобразуется цифровым ключом 54 соответственно в единичное и нулевое значение.
При подъеме груза со смещенным центром тяжести (фиг 7) значение нагрузки на строп I (датчик 25) будет существенно больше, чем на строп II (датчик 26). следовательно, на выходе цифрового ключа 44 будет О, а на выходе цифрового ключа 54 - 1. Траверса принимает негоризонтальное положение в реэупьтате чего в левой емкости 4 поплавок 7 замыкает контакты 11, с которых на блок 13 управления поступает единичный сигнал
С цифрового ключа 44 О поступает на элемент НЕ 45. который его инвертирует о 1. На элемент И 53 поступают 1 с элемента НЕ 45 и 1 с цифрового ключа 54. на выходе у него будет 1. которая поступает на первый вход элемента И 58. На второй его вход поступает Г с выхода 11 датчика уровня. Результирующий сигнал 1 поступает на вход элемента И 62. на второй вход которого поступает 1 от элемента НЕ 64. так как на его вход поступает О от концевого выключателя 28, контакты которого не замкнуты Полученный на выходе элемента И 62 единичный сигнал усиливается усилителем bb и поступает на электрическое реле 67 замыкающего контакта механизма изменения длины стропа II на укорачивание. В результате укорачивания стропа II траверса будет выравниваться и займет горизонтальное положение (фиг 7) Контакты 11 датчика уровня окажутся разомкнутыми и на элемент И 58 поступает О, в результате чего на выходе его появляется О и укорачивание сфопэ II прекращается
Нулевые значения от выходов 11 и 12 датчика уровня будут поступать на элемент ИЛИ-НЕ 70, на выходе которого будет 1, которая поступает на вход элементов И 59 и 61. На второй вход элемента 59 поступает 1 от элемента И 53. Результирующий единичный сигнал усиливается усилителем 71 и поступает на электрическое реле 73 замыкающее контакты индикации смещения траверсы в сторону I
Крановщик включением механизма поворота стрелы медленно смещает точку подвеса траверсы в сторону I и включением механизма подъема медленно поднимает траверсу. Если точка подвеса траверсы не заняла еще положения над центром тяжести груза, то подьем ее приводит к положению, изображенному на фиг. 7 Процесс перераспределения длин стропов продолжается по алгоритму, описанному выше
Если точка подвеса траверсы находится над центром тяжести груза и траверса горизонтальна, то значения вертикальной нагрузки на стропы I и II будут равны, на выходе цифровою к/ ючэ 44 будет 1 а на
выходе элемента Ht 45 О, кошрый поступает н вхп/ многовхсдоопг элемента ИЛИ-НЕ 46 и- остальные входы которого поступают нулевые значения от выходов 11
и 12 датчика уровня и концепых выключателей 27 и 28 Получаемый на выходе элемента ИЛИ-НЕ 46 t-диничный сигнал усиливаете усилителем 47 и поступает на олектрическоо реле 48 замыкающего контакты индикации
подъема груза 37. Единичный сигнал о1 ЭЛР мента ИЛИ-НЕ 46 поступает также нэ вход S асинхронного RS-триггера -10 на вход R которого поступает О от элемента НЕ ЬО на вход которого подключен блок 51 лопми
рования единичного сигнала включения устройства Единичный сигнал гуляющий на вход 3, переключает триггер 43 и РДИНИЧ ное состояние, единичный CHI нал на выходе усиливается усилителем 52 и посыпает н
вход упрэелярмых стопоров 19 и 20 приводя их во ьзнимодеистрие - храповиками редукторов механизмов измене -ия длин стропов 14 и 15
Асинхронный RS-триггер 19 необходим
для повышения надо нос in ряГюты траверсы Если в процессе подъема груза из-за оаскачиваьия траверз при гм-.воротах стре лы разность еертикалькп на. рузки ча стропы I и И станет больше порогоьо О ччя (ения,
то на вход S г иггера поступаете лемг-н- та ИЛИ-НЕ нулевой сигнал При чтом выходное значение риггерэ 49 не изменяется и стопоры 19 и 20 не выходят из язэимодейст вия с храповиками
В случае отцепа стропа в процессе,стачовки траверсы над центром тяжести i руза в оезультате его плохого закрепления, в со- отвегс вии с аЛ|Оритмом перераслределе- нит длин стропов, реализуемого блоком
управления этот строп будет укорачиоаться пока не сработает когиев й ьык,г,пчэтепь. В этом случае единичный сигннл с концевог выключателя 27 и 28 поступав 1 нэ вход элемента ИЛИ 75. нэ выходе которого т,хже
будет 1 Ьыходной сигнал элемента ИЛИ 75 усиливается усилителем 76 и поступает на электрическое реле 77, замыкающее коч такты индикации 36 блокировки подъема. Получив сигнал разрешения подъема
груза на блоке индикации, крановщик включением механизма подъема поднимает груз Раси нивания груза при подъеме происходить не будет так как центр тяжести груза ч центр тяжести траверсы будут лежать на
вертикали, проходящей через точ. у подвеса траверсы.
Подьем грулг со смещенным центром тяжести в сторону II траверсы огуществля аналогично описанному ьмше
b. Kit- - г рч.м I lii,т р.тализ , OTUf цл г;тг;Нnao i tK.-.- i/ii -KiH SA дте ,;м и импульс- .), ге/ии//,
О э Г м .. / а ч ч о о .-. г. : е и и я . Гсэперс.., -одгфыг-щ;.-: Сл. ку со стро тми с.,:овой привод и да 11-ик горизонтально с яохгния 69/ к и о г л и ч а ю щ а я с я тем что с цзлыо по ыше Ч Ч безопасноеги пл да строг: ль,циког .осуществления подломи груза сг смеи-.;о;..1ым центром тяжести tv33 р;;Скач1,.-. и автоматического кон; ;.о,.я застрой :вки груза, она снабжена датчиками з р икальнсч млгрузки на стрелы р.,c i сложенные и н;, храях алки, дву.ч кон . сРыг- i BbiV.-i-c1 :3:C/i ;vn, пасполохечныМИ Г НИ Ж И О Й -J .,;.-ПО Н Г; uo/ K.I блОКОМ упрчвления граг.орсой. -лскг; формирования сигк, включения г:;;ока угроал-.-нич граверной, олсжс.;и .- ..г.нтйш-нс. О сме .це: 1.я траверсы. мечан;,мами /., длиь с тропою с блоками ручного у)р.г ягчия мрханизмяг- и и .чемым гл и ю- Г йми :ц;ичем Кг1:./ ,..м .. M змг иону.н длин стропов выполнен с индисидугльнь м приводом, KO iophiH включает з се я призод- ной бораоан и ре.т rrnp с хр-- .овиком. :
СТОПОр уСТЯ .Сч ЛС:- С -С ГК С-Жнос ью ьзаимодейс ч ия с /р позиком, пси ЭТОРИ ,-:кг,-:и и i-i.jr п . на ст-.Л-ы. выключатели и дй.мик уровня гоедг-нены с входами блока управления , выхо,.,lj( СОТОрОТ; СО .;ДИ ОНа1 С плОДЯМ: . бпсКЭ Uriд и к ; VI и г о р и з о 11 - а л :. и г о с е dn e н и ч траверсы, , прявл« :1, сгоппр; г и и ;ри- гюдами механизме. изменения стропов, к вторым входам которых подключены блоки ручного управления этими механизмами.
2 Тряпорса по п , о i ; и ч а м- щ я я- ся тем, что блок упрявлгния тр- ерсой включает Р. двухпороговый 5/юк сраа- нения. инвертор, дели t-n . НЕ, эле ттьт ИПИ-i-fii, ./онньь PC тоигг р. электрическое реле, две :;,:ф.-.; зло1- . ов И, компаратор, ИЛ1 1 -i рлик оычита- . к ппл1:;жите/1ьному и отрицательному входам которого подключены соответственно выходы первого и второго датчиков нагрузки на стропы, а выход его подключен к первому ,:.ходу двухпопогового блоке; сравнения и к выходу инвертора кпходукоторого пр(.-гпединон дел /-,теля, к входу кото р го присоединен выход первого датчи- са tifefjTi гк:ы О | нагру и tia стропы, выход
двух.iopof-тпого яокя срапнемия через цифровой люч подключен ня вход элемента НЕ которое подключен на первый вход зге г- -т: и т а И Л И-НЕ. на остальные гогорого подклюиеиы дг , иыход.э датчика го- ризонгального положения балки и концевые выключатели, а выход его подключен на S-еход асинхронного RS-триггера и через усилитель подсоединен к электриче0 ск.ому реле, замыкающему контакты блока горизонтального смещения траверсы, выход элемента НЕ также подключен к первому входу элемента И. на второй вход которого подсоединен выход цифрового
5 ключ. на ход которого подключен компа- рятсо, к положительному входу которого псдс оединеи блока вычитания, а от- рица:ельный заземлен а выход элемента И подсоединен к входам дсух пар элементов
0 И, причем к первым элементам И в этих парах напрямую, а к вторым - через элемента НЕ. на вторые входы первой пары элементов i/1 подсоединены первый и второй датчика уровня а выходы их подсо5 единены к первому входу элементов И. на второй вход которых подключены через элементы Hfc выходы соответственно второго и HvpcCiO к.онцеоых выключателей, а выходы ич ерез усилители подсоединены к элект0 рическим реле, замыкающим контакты ме- ханилмоо изменения длины соответстеенно еторого и первого стропов, при этом на вто- P .se входы другой пары элементов И подключен выход элемента ИЛИ-НЕ, входами
J которого являются два выхода датчика уров- ня, причем элемент И из этой пары с инвер- смым первым входом имеет третий вход, на который подключен выход упомянутого пер- чогп элемента НЕ. а выходы этой пары эле0 ментов И через усилители подключены к элехт рическим реле, замыкающим контакты соответственно блока индикации горизонтального смещения траверсы в сторону I и смещения траверсы в сторону II, на R-вход
ь асинхронного RS-триггера через элемент НЕ подсоединен блок формирования сигнала включения блока управления траверсой, выход RS-триггера через усилитель подключен к управляемым стопорам, выходы кон0 цевых выключателей дополнительно подсоединены на входы элемента ИЛИ, выход которого через усилитель подключен к электрическому реле, замыкающему контакты блока индикации горизонтального сме5 щения траверсь..
9- 11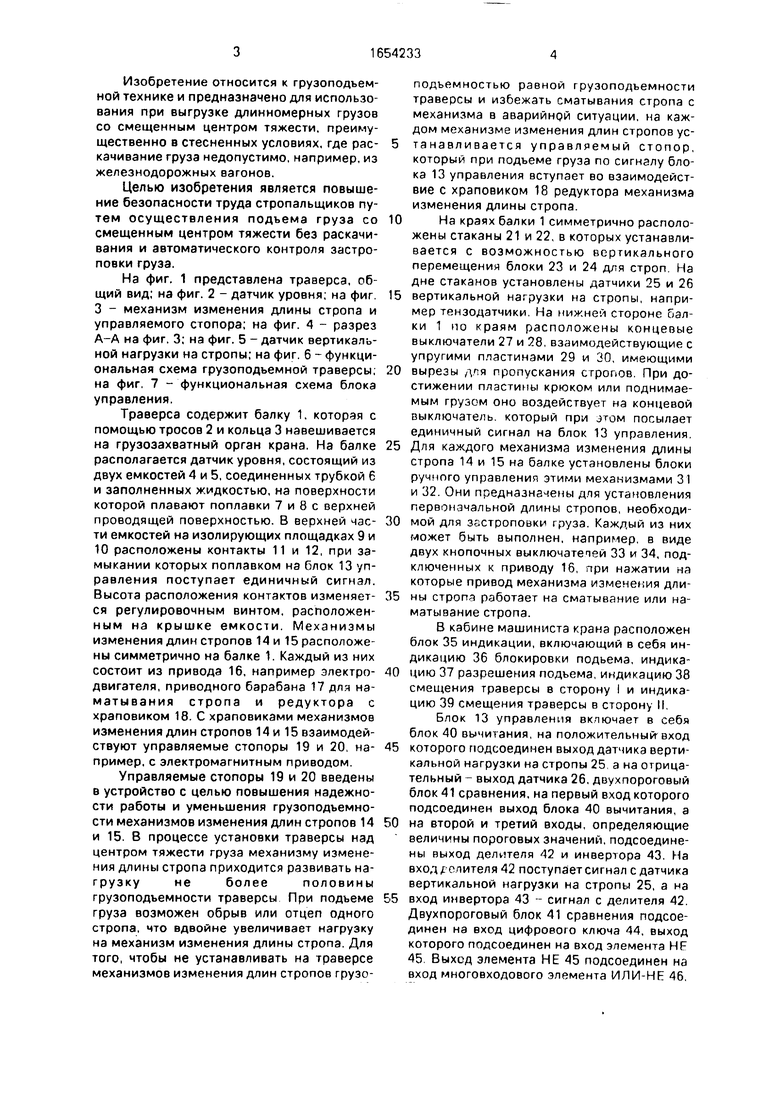
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления грузоподъемным механизмом со стрелой | 1989 |
|
SU1794864A1 |
| Устройство для определения загрузки ковша экскаватора | 1988 |
|
SU1573098A1 |
| Устройство для отключения электродвигателя конвейера | 1988 |
|
SU1646959A1 |
| Устройство для прицельной установки груза подъемно-транспортным средством | 1989 |
|
SU1816732A1 |
| Грейфер с дистанционным управлением | 1988 |
|
SU1553510A1 |
| Устройство для аварийной остановки привода с самоконтролем линии связи | 1987 |
|
SU1471173A1 |
| Автоматизированный дистанционно управляемый подъемный крюк | 2023 |
|
RU2809751C1 |
| Устройство управления тренажером операторов грузоподъемных машин | 1983 |
|
SU1107151A1 |
| УСТРОЙСТВО ОРГАНИЧЕНИЯ ГРУЗОПОДЪЕМНОСТИ МОСТОВОГО КРАНА | 2014 |
|
RU2566459C1 |
| Устройство для проверки средств защиты трехфазной сети от перенапряжений | 1986 |
|
SU1411880A1 |
Изобретение относится к грузоподъемной технике и предназначено для использования при выгрузке длинномерных грузов со смещенным центром тяжести, преимущественно в стесненных условиях, где раскачивание груза недопустимо, например, из железнодорожных вагонов. Целью изобретения является повышение безопасности труда стропальщиков путем подъема груза со смещенным центром тяжести без раскачивания и автоматического контроля за- строповки груза. Траверса содержит балку 1, которую с помощью тросов 2 и кольца 3 навешивают на грузозахватный орган крана. На балке расположен датчик уровня, со- стоящий из двух емкостей 4 и 5, соединенных трубкой 6 и заполненных жидкостью, на поверхности которой плавают поплавки 7 и 8 с верхней проводящей поверхностью. В верхней части емкостей на изолирующих площадках 9 и 10 расположены контакты, при замыкании которых поплавками на блок управления поступает единичный сигнал. 1 з.п.ф-лы, 7 ил. ё Os ел ю oj со
16
/
« , А
uh7
19
/
У Фиг.З
Риг.2
17
А-А
/
rh
19
Фиг.Ь
Фиг.5
// П 27 28
| Монтажный подвес | 1974 |
|
SU544599A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
