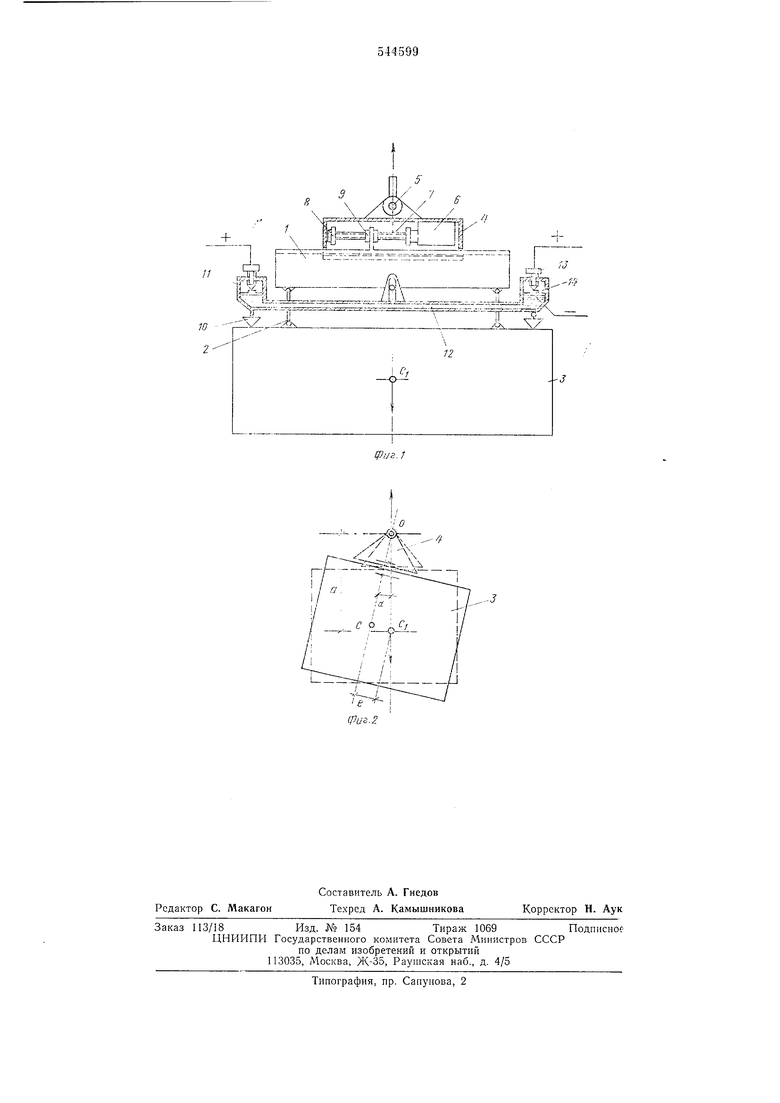
Когда деталь окажется на весу, то она займет такое положение, что ее фактический центр тяжести Ci разместится иа отвесной линни, проходящей через ось О вращения обоймы 4, с некоторым эксцентриситетом е по отношению к расчетному центру тяжести С, т. е. будет иметь перекос на угол ai. Вместе с деталью 3 такой же перекос получает и датчик уровня, так как он упорами 10 опирается на деталь.
Контакты 13 н 14 обоих датчиков включены в цепь управления силовым приводом так, что при замыкании их на одном датчике И силовой привод 6 сообщает вращение винту 7 в одном направлении, а при замыкании контактов па другом датчике привод сообщает вращепие винту в обратном направлении.
Между коптактами имеются регулируемые зазоры, которые одинаковы при нахождении датчиков на одном уровне.
В случае перекоса детали на угол, превышающий чувствительность датчика уровня, контакты одного пз датчиков, находящегося ниже другого, окажутся замкнутыми, а другого - разомкнутыми.
Включением питания в сеть управления будет включен силовой привод, который сообщпт враи1,ение винту в нужном направлении, что приведет в движение балку 1 и обойму 4 во взаимнопротнвоположных направлениях, а это заставит обойму поворачиваться относительно своей шарнирной опоры 5, а деталь - относительно своего центра тяжести с некоторым вертикальным перемещением. Действие силового привода будет продолжаться до тех пор, пока деталь достигнет такого положения в
ориентируемой плоскости, когда оба датчика придут на один уровень и замкнутые контакты разомкнутся, т. е. деталь будет приведена в заданное положение по положению ее грапи. В случае, если грани детали сообщается горизонтальное ноложение, то длина упоров 10 устанавливается одинаковой, а в случае наклонного положения длина упоров устанавливается разной.
Точность ориентации изделия зависит от расстояния между уиорами и от величины зазоров между контактами.
Так как датчик уровня опирается упорами на грань детали, он фиксирует положение этой
грани, т. е. ориентирует деталь независимо от ее веса, а также не зависит от точек приложения и длииы элементов крепления детали с балкой.
Формула изобретения
Монтажный подвес, включающий балку с элементами креиления к ней монтируемой детали и устанавливающее устройство с приводом, отличающийся тем, что, с целью
иринудительного сообщения соединенной с подвесом монтируемой детали необходимого наклона в горизонтальной плоскости, балка соединена подвижно с шарнирно подвешенной обоймой, а устанавливающее устройство выполнено в виде привода, связанного с датчиком уровня, состоящего из датчиков перемещения с регулируемыми и плавающими контактами, расположенными в сообщающихся сосудах, и снабженного упорами, фиксирующими положение грани монтируемой деталн относительно датчика уровня.
IfbsSiuii fH
,i
Wi tin
7fl 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Монтажный подвес | 1977 |
|
SU660915A1 |
| Монтажный подвес | 1981 |
|
SU998303A1 |
| Устройство для ускоренных испытаний почвообрабатывающих рабочих органов | 1989 |
|
SU1725087A1 |
| Устройство для контроля отклонений от прямолинейности | 1990 |
|
SU1781533A1 |
| Устройство для монтажа стеновых панелей | 1979 |
|
SU1028821A1 |
| Устройство для монтажа крановых конструкций | 1985 |
|
SU1244080A1 |
| .УСТАНОВКА ДЛЯ БЕСТРАНШЕЙНОЙ ПРОКЛАДКИ ТРУБ | 1973 |
|
SU379754A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ОТКЛОНЕНИЯ ФОРМЫ ТОРЦА ТЕКСТИЛЬНОЙ ПАКОВКИ | 2003 |
|
RU2257541C2 |
| Круглошлифовальный станок для врезного шлифования | 1972 |
|
SU592583A1 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2091723C1 |