(54) УСТРОЙСГВО ДЛЯ МОДЕЛИРОВАНИЯ ВИБРОЗАЩИТЫ ОПЕРАТОРА


| название | год | авторы | номер документа |
|---|---|---|---|
| ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1990 |
|
SU1797383A1 |
| Устройство для решения дифференциальных уравнений в частных производных | 1990 |
|
SU1734103A1 |
| Субоптимальный нелинейный фильтр | 1990 |
|
SU1714618A1 |
| Устройство для приема дискретных сигналов | 1986 |
|
SU1374444A1 |
| Генератор случайного потока импульсов | 1991 |
|
SU1793534A1 |
| Устройство для адаптивной обработки сигналов | 1981 |
|
SU1014127A1 |
| Устройство для измерения центральнойчАСТОТы СпЕКТРА СигНАлА | 1979 |
|
SU813290A1 |
| Управляемый датчик случайных чисел | 1983 |
|
SU1160407A2 |
| Устройство для цифровой фильтрации на основе дискретного преобразования Фурье | 1988 |
|
SU1640710A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
SU1829279A1 |
Изобретение относится к автомати зации научных исследований и может быть применено для автоматизированного синтеза виброзащиты человекаоператора и оценки вибрации на его организм. Известно устройство для моделиро вания виброзащиты человека-оператора. Оно позволяет провести синтез параметров всей системы виброзащиты человека-оператора или ручных инстр ментов посиле реакции руки от перемещения рукоятки, а также по ускоре ниям отдельных точек с измеряемыми состояниями в них Наиболее близким по технической сущности к предлагаемому является устройство, содержащее два возбудителя колебаний, датчики перемещения два блока моделирования вибраций и блок оптимизации . Однако это устройство не позволяет произвести синтез виброзащит- ной системы по состояниям в точказскоторые при моделировании непосредственно не могут быть измерены или для их измерения необходимы специальные исследования. Такими точками являются все внутренние органы человека-оператора и места, к которым трудно прикрепить датчики. Цель изобретения - расширение функциональных возможностей за счет обеспечения возможности моделирования защиты внутренних органов оператора. Для достижения цели в устройство для моделирования виброзащиты оператора, содержащее два возбудителя колебаний, первый из которых механ: чески-связан с рукояткой, на которой расположеи первый датчик перемещения, а второй-с сиденьем , на котором расположен второй датчик перемещения, третий датчик перемещения, расположенный на плече человека-оператора, два блока моделирования вибраций, каждый из которых содержит генератор
электрических колебаний, усилитель, узел дифференцирования, два умножителя и сумматор, причем выход генератора электрических колебаний соединен с первым входом усилителя, второ вход которого подключен к выходу соответствующего датчика перемещения, а выход соединен со входом узла дифференцирования, связанный с первым входом первого умножителя, выход которого соединен с первым входом суммтора, выход узла дифференцирования соединен с первым входом, второго умножителя, выход которого соединеа CQ вторым входом сумматора, выход которого соединен со входом соответствующего возбудителя,колебаний,и блок оптимизации, содержащий двухлучевой индикатор, первый вход которого подключен к выходу третьего датчика перемещений, и четыре задатчика напряжений, быходы которых соединены соответственно со вторыми входами умножителей блоков.моделирования вибраци дополнительно введеш 1 четыре блока памяти, четыре блока умножения, четыре сз мматора, блок деления комплексных чисел, блок вычисления модуля, блок сравнения, источник постоянного напряжения к два блока вычисления составлякмдих динамической жесткости, первый и второй входы каждого из которых подключены соответственно к выходам сумматора и генератора электрических колебаний соответствующего блока моделирования вибрации, первые выходы первого и второго блоков вычислений составляющих динамической жесткости соединены соответственно с объединенными первыми входами первого и третьего, и второго, и четвертого блоков умножения комплексных чисел, вторые входы которых аналогично подключены ко вторым выходам блоков вычисления составляющих динамической жесткости, первый и второй выходы блоков памяти соединены соответственно с третьими и четвертыми входами соответствующих блоков умножения комплексных чисел, выходы первого из которых соответственно соединены с первыми входами первого и второго сумматоров, выходы второго блока умножения комплексных чисел соответственно соединены со вторыми входами первого и второго сумматоров выходы третьего блока умножения комплексных чисел соответственно соединены с первыми входами третьего и четвертого сумматоров, а выходы четвертого блока умножения комплексных чисел соответственно соединены со вторыми входами третьего и четвертого сумматоров, выходы всех сумматоров соответственно соединены со входами блока деления комплексных чисел, выходы которого соответственно соединены со входами блока вычисления модуля, выход которого соединен с первым входом блока сравнения, второй вход которого подключен к выходу источника опорного напряжения, а выход блока сравнения соединен со вторым входом двухлучевого индикатора блока оптимизации.
Блок умножения комплексных чисел содержит четыре умножителя и два сумматора, причем объединенные первые входы первого и четвертого, второго и третьего умножителей являются, соответственно первым и вторым входами блока, объединенные вторые входы первого и второго, третьего и четвертого умножителей являются соответственно третьим и четвертым входами блока, выходы первого и третьего умножителей соединены соответственно со входами первого сумматора, выходы второго и четвертого умножителей соединены соответственно со входами второго сумматора, а выходы сумматора являются выходами блока.
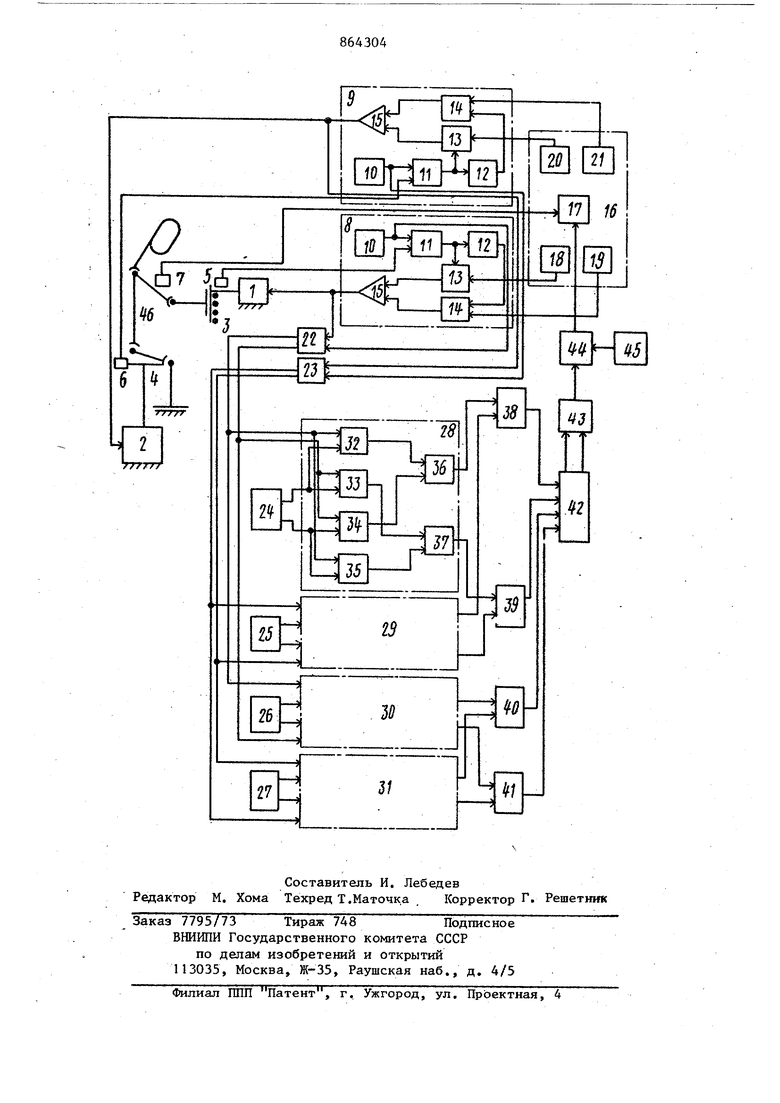
На Чертеже изображена схема устройства.
Устройство содержит возбудители 1,2 колебаний, рукоятку 3, закрепленную на подвижной части возбудителя 1, сидение 4, закрепленное на подвижной части возбудителя 2, датчики 5-7 перемещения на плече человека-оператора, блоки моделирования вибрации 8,9, каждьм с генератором электрических колебаний 0, усилителем
11, узлом дифференцирования 12, блоками умножения 13 и 14 и сумматором. 15, блок 16 оптимизации с электронным двухлучевым индикатором 17, и задатчи0 ками напряжений 18-21, блоки 22 и 23 вычисления составляющих динамической жесткости, блоки памяти 24-27, идентичные блоки 28-31 умножения комплексных чисел, умножители .32-35 блока 28 умножеакя комплексных чисел, сумматоры 36,37, блоки yм oжeния комплексных чисел, сумматоры 38-41, блок 42 деления комплексных чисел, блок 43 вычис5ления модуля, блок ДА сравнения, источник 45 постоянного напряжения, 46 - выбранная точка на теле человека-оператора. Устройство работает следующим образом, В простейшем случае синтезируемыми виброзашитными виброгасителями ру ки и сидения являются виброизоляторы соответственно с параметрами с h и f 2. коэффициенты жесткости, h , 2 коэффициенты демпфирования, при этом, если колебания действующие через виброгасители человека-оператора, происходит по закону, а насидение - , то в бло ках моделирования 8,9 происходит решения уравнений вида (X,-V)()--Rp (1) (Xa.()R-c оператор дифференцирования; где р колебания рукоятки 3., фикси руемое датчиком 5; колебания сидения 4, фиксируемое датчиком 6j сила реакции руки на воздей ствия колебаний, через амо тизатор с , R - сила реакции тела человека на возяействие через аморти затор 2. Z Генераторы колебаний 10 вырабатыв ют сигналы, пропорциональные задавае мым колебаниям | и j. которые пос тупают в первые входы усилителя, на вторые входы которых поступают сигна лы с выходов датчиков перемеще1шя 5 и 6, которые пропорциональны фактическим перемещениям руки и сидения человека-оператора соответственно, т.е. х и х . На выходе усилителей формируются сигналы, пропорциональны х- и х-- 2 соответственно. Сигнал с выходов усилителей поступают к входам узлов дифференцирования 12 Блоки 22,23 вычисления составляю щих динамической жесткости работают исходя из следующих уравнений RB -(,)() -(W CaXXo/S o.-l) (4) При поступлении на их входах соот ветственно .H первом и втором выходах 23 появляются сигналы пропорциональные соответственно реал ной а 2 и мнимой Ь частями динамической жесткости, а на первом и втором выходах 22 появляются сигналы, пропорциональные соответственно реальной а . и мнимой b частями динамической жесткости, ла выходах которых формируются сигналы, пропорциональные р(х4-§) и p(). Сигналы, с тех же выходов усилителей, а также сигналы с выходов узлов дифференцирования поступают на входы блоков умножения 13 и 14, На вторые входы блоков умножения 13 поступают сигналы от задатчиков напряжения 10 и 20 соответственно, которые пропорциональны коэф4ициентам h и с а на вторые входы блоков умножения 14 соответственно - сигналы от задатчиков напряжения 19,21, которые пропорциональны коэффициентам , Таким образом, на выходе блоков умножения формируются сигналы,пропорциональные )-h и ,() и Caixz ), Сигналы с выходов блоков умножения суммируются сумматорами 25, на выходах которых по уравнениям (l) и (2) формируются сигналы, пропорциональные Rn и R, соответственно. Сигналы, пропорциональные RpИ R, поступают на входы возбудителей колебаний I и 2 соответственно, которые обеспечивают передачу усилий руке и сидению пропорциональных сигналам RO и R, Изменением сигналов задатчиков напряжения 18-21 можно, таким образом, изменять параметры виброизоляторов руки и сидения h, , 2 С.2 Наблюдая колебания, поступающие от датчика 7 на экране электронно-лучевого индикатора 17, можно наблюдать за величиной и сарактером колебательного процесса. Изменением (подбором) параметров можно обеспечить Ч - 2 минимум амплитуды колебаний плеча руки оператора при различном характере воздействий j f рые можно изменять с помощью генераторов 10, Для осуществления синтеза виброгаснтелей по состояниям (скорости, ускорению, перемещению) внутренних органов человека-оператора или iio состояниям отдельных точек, например на теле человека 46 состояния которых трудно измерить непосредственно, при моделировании виброзащяты, измеренные заранее в лабораторных условиях, например при
ПОМО1ДИ рентгеноскопии, податливости между другими точками и точкой 46 вводятся в блоки памяти 24-27.
Если при непрерывном синтезе с h h2 изменяются, и на выходе блока 43 появляется сигнал, превышакщий сигнал с выхода блока 45, второй луч индикатора 17 отклоняется и сигнализирует, что эффек тивность гашения колебаний для точки 46 не увеличивается при увеличении эффективности колебаний в точке 7, сигналы с выхода блока 44 ограничивают изменения синтезируемых параметров h, с и h, Сл Tie. сигнал с выхода блока 44 служит предупреждающим о границе эффективности гашения колебаний в точке 46. При этом синтез прекращается и принимается новая стратег гия поиска минимума при синтезе блоком 16 оптимизации. Представление податливостей в комплексной форме позволяет утверждать, что при синтезе сложных структур амортизаторов, т.е. ручных машин, рулевых прспособлений, а также сидений при заданном диапазоне частот и различных колебаний оснований амортизаторов руки и сидения, принцип работы устройсва остается тем же. Вместо блока 16 оптимизации могут быть применены автоматизированные стандартные блоки оптимизации, как МО, АО-1 и др.
Предложенное устройство позволяет существенно улучшить процесс и качество синтеза виброзащиты, дает болшую практическую пользу, включая экономию времени при проектировании таких систем.
Формула изоб |етения
1, Устройство для моделирования виброзащиты оператора, содержащее два возбудителя колебаний, первый из которых механически связан с рукояткой, на которой расположен первый датчик перемещения, а второй - с сиденьем, на котором расположен второй датчик перемещения, третий датчик перемещения, расположенный на плече опратора, два блока моделирования вибрации, каждый из которых содержит генератор электрических колебаний, усилитель, узел дифференцирования, два умножителя.и сумматор, причем выход . генератора электрических колебаний соединен с первым входом усилителя, второй вход которого подключен к выходу соответствующего датчика перемещения , а выход соединен со входом узла дифференцирования и с первым входом первого умножителя, выход которого соединен с первым входом сумматора, выход узла дифференцирования соединен с первым входом второго умножителя, выход которого соединен со вторым входом сумматора, выход которого соединен со входом соответствующего возбудителя колебаний, и блок оптимизации, содержащий двухлучевой индикатор, первый вход которого подключен к выходу третьего датчика перемещений, и четыре задатчика напряжений, выходы которых соединены соответственно со вторы№1 входами умножителей блоков моделирования вибрации, отличающееся тем,
0 что, с целью расширения функциональных возможностей за счет обеспечения возможности моделирова шя защиты внутренних органов оператора, в него дополнительно введены четыре блока
5 памяти, четыре блока умножения, четыре сумматора, блок деления комплексных чисел, блок вычисления модуля, блок сравнения, источник постоянного напряжения и два блока вычисления
Q составляющих динамической жесткости, первый и второй входы каждого из которых соответственно подключены к. выходам сумматора и генератора электрических колебаний соответствующего блока моделирования вибрации, первые выходы первого и второго блоков вычисления составляющих динамической жесткости соединены соответственно с объединенными первыми входами первого, третьего и второго, четвертого блоков умножения комплексных чисел, объединенные вторые входы первого, третьего и второго, четвертого блоков умножения комплексных чисел подключены соответственно ко вторым выходам блоков вычисления составляющих динамической жесткости, первый и второй выходы каждого блока памяти соединены соответственно с третьими и четвертыми входами соответствующего блока умножения комплексных чисел, выходы первого из которых соответственно соединень с первыми входами первого и второго сумматоров, выходы второго блока умножения комплексных чисел соответственно соединены со вторыми входами,, первого и второго сумматоров, выходы третьего блока умножения комплексных чисел соответственно соединены с первыми входами третьего и четвертого сумматоров, а выходы четвертого блока умножения комплексных чисел соответственно соединены со вторыми входами третьего и четвертого сумматоров, выходы всех сумматоров соответственно соеди нень со входами блока деления комплексных чисел, выходы которого соответственно соединены со входами блок вычисления модуля, выход которого соединен с первым входом блока сравнения, второй вход которого подключен к выходу источника опорного напр жения, а выход блока сравнения соединен со вторым входом двухлучевого индикатора блока оптимизации, 2. Устройство по п.1, о т л и ч а ю щ е е ся тем, что блок умножения комплексных чисел содержит четыре умнржителя и два сумматора, при чем объединенные первые входы первог и четвертого, второго и третьего умножителей являются соотчетственно первым и вторым входами блока, объединенные вторые входы первого и второго, третьего и четвертого умножителей являются соответственно третьим и четвертым входами блока, выходы первого и третьего умножителей соединены соответственно со входами первого сумматора, выходы второго и четвертого умножителей соединены соответственно со входами второго сумматора, а выходы сумматоров являются выходами блока. . Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СССР № 607239, кл. G 06 G 7/48, 1975. 2.Авторское свидетепьство СССР по заявке 2466543/18-24, кл. G 06 G 7/48, 1978 (прототип).
:rJE
л
cb 56
/
t3
ол 9 I
2Q
fon
11
16
Hi
E
±
fj
«6
tf 6
1
/////
f
f
