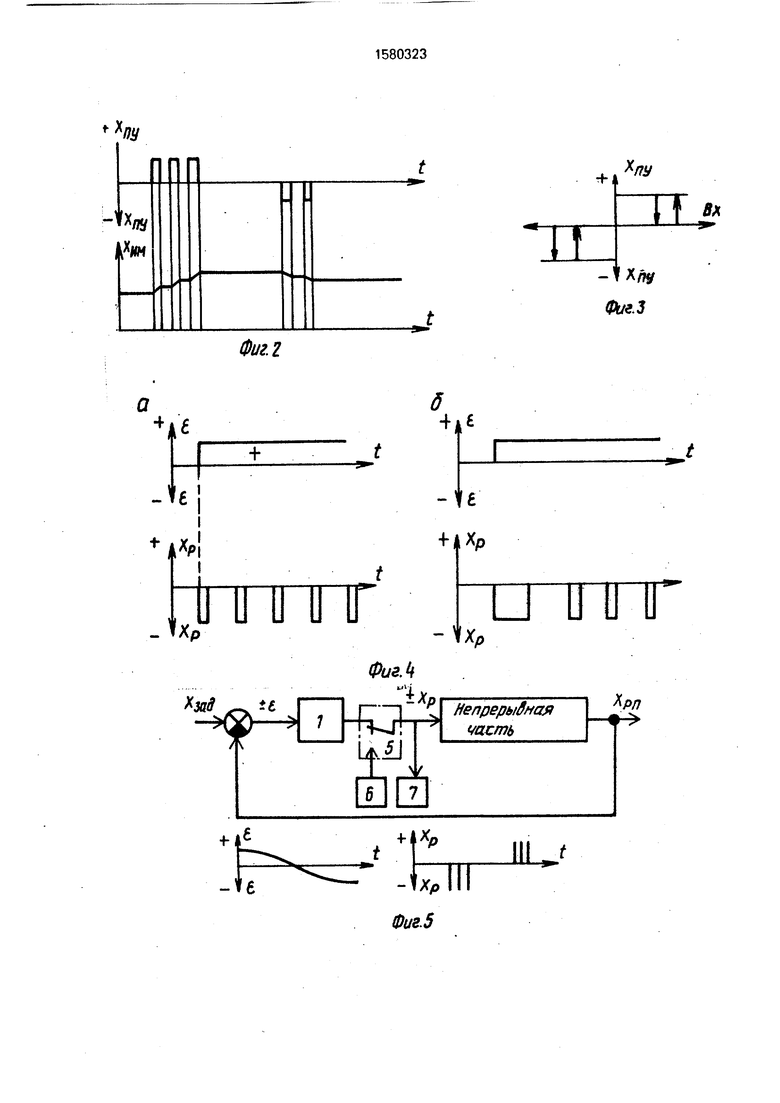
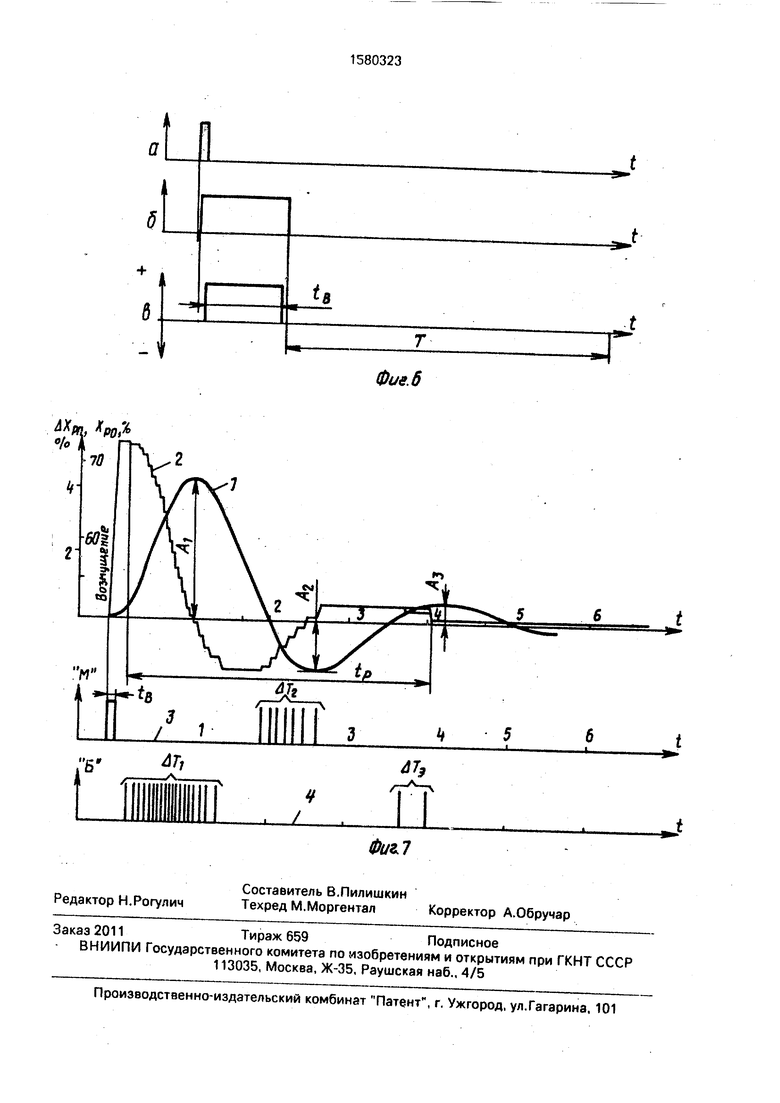
статическая характеристика пускового устройства (ПУ); на фиг. 4 - динамическая характеристика широтно-импульсного модулятора (ШИМ), где а - И-закон, б - ПИ- закон; на фиг. 5 - упрощенная схема САР; на фиг. 6 - временная диаграмма работы устройства; на фиг. 7 - переходные процессы в различных точках САР.
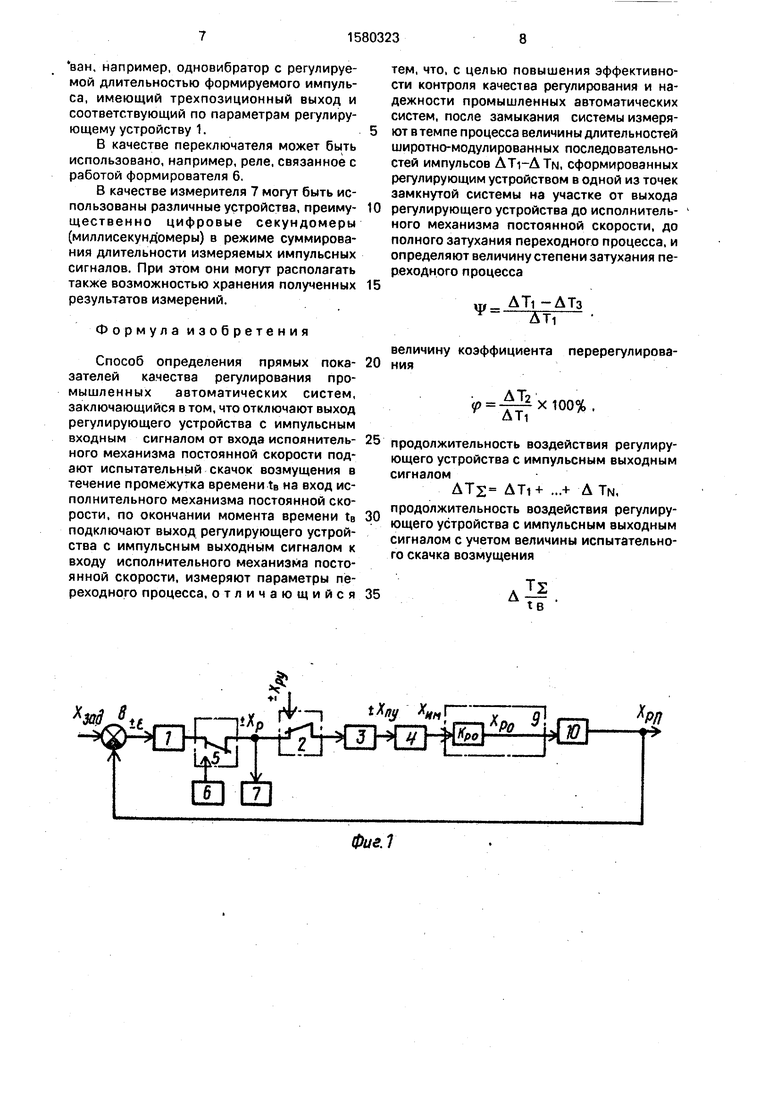
Схема САР (фиг. 1), используемая для осуществления способа, содержит регулирующее устройство 1 с импульсным выходным сигналом, блок 2 ручного управления, ПУ 3, ИМ 4 постоянной скорости, переключающее устройство 5, формирователь 6 им- пульсного сигнала испытательного возмущения, измеритель 7 длительности импульсов, устройство 8 рассогласования, регулирующий орган 9, объект 10 регулирования. На фиг. 1 обозначено: Хзад - сигнал задания, е - сигнал рассогласования, Хру - импульсный сигнал ручного управления, Хим сигнал по положению выходного вала ИМ, Кро - коэффициент передачи регулирующего органа; Хрп - сигнал по регулируемому параметру, Хпу - импульсный выходной сигнал ПУ.
На работающей промышленной САР, находящейся в установившемся состоянии, отключаются выходные цепи регулирующего устройства 1 с помощью дополнительного переключающего устройства 5 от входа блока 2 ручного управления. Одновременно с помощью переключающего устройства 5 к входу блока 2 ручного управления подключается формирователь б импульсного сигнала испытательного возмущения, параметры выходных цепей которого идентичны параметрам выходных цепей регулирующего устройства 1. Сразу после переключения формирователь 6 подает на вход блока 2 ручного управления одиночный импульсный сигнал испытательного возмущения с заданной длительностью tu и требуемого направления воздействия Больше или Меньше. Фактическая величина IB определяется измерителем 7 длительности импульсов. Под воздействием этого импульсного сигнала испытатель- ноге возмущения срабатывает ПУ 3 и выходной орган ИМ 4 постоянной скорости перемещения в течение промежутка времени te и в соответствующую сторону Больше или Меньше, формируя на входе объекта регулирования единичный скачок испытательного возмущения. После окончания формирования импульсногр сигнала испытательного возмущения формирователь б отключается от входа блока 2 ручного управления с помощью переключающего устройства 5. а к входу блока ручного
управления снова подключается регулирующее устройство 1. Затем под воздействием испытательного возмущения в замкнутой автоматической системе регулирования
возникает переходной процесс, в результате отработки этого возмущения на выходе регулирующего устройства 1 формируется N последовательностей импульсных сигналов. По мере формирования каждой из N
последовательностей импульсных сигналов их длительность АТ1,АТ2,АТз определяется измерителем 7 длительности импульсов. Процесс определения параметров ATi, АТя, AT з и т.д. поясняется на фиг. 7 ,
где 1 - регулируемый параметр Хрп,
2- положение регулирующего органа Хро,
3- выходной импульсный сигнал Меньше ; 4 - выходной импульсный сигнал Больше.
На временной диаграмме 3 показано положение одиночного импульсного сигнала испытательного возмущения с заданной длительностью с направлением воздействия в сторону Меньше, в результате регулирующий орган перемещается с постоянной скоростью согласно кривой Хро. После отклонения регулируемого параметра Хрп выше предела установленной зоны нечувствительности регулирующее
устройство 1 формирует первую последовательность импульсных сигналов Больше с длительностью ATi, затем вторую последовательность импульсных сигналов Меньше с длительностью АТ2, затем
третью последовательность импульсных сигналов Больше с длительностью АТз и т.д.
Для сравнения на фиг. 7 показан харак- тер измерения регулируемого параметра Хрп и процесс изменения величины амплитуд Ai, A2 и Аз согласно известному способу относительно оси симметрии колебаний.
Величина степени затухания переходного процесса в замкнутой автоматической системе регулирования, содержащей регулирующее устройство с импульсным выходным сигналом, определяется из соот- ношения
m ATi -АТз v2ГП
Величина коэффициента перерегулирования переходного процесса в замкнутой автоматической системе регулирования, содержащей регулирующее устройство с импульсным выходным сигналом, определяется из соотношения
AT
tf - х 100% . ATi
Величина всей продолжительности времени воздействия ATj; регулирующего
устройства 1 на исполнительную часть системы, включающей ПУ 3, ИМ 4 постоянной скорости и регулирующий орган, определяется из соотношения
АТЈ АГт+ AT2+...+ATN Показатель, характеризующий продолжительность воздействия регулирующего устройства 1 на исполнительную часть системы с учетом величины испытательного возмущения, определяется из соотношения
AJz
tB
Динамические свойства объектов 10 регулирования приближенно описываются следующими передаточными функциями:
W (
Коб
(Тоб-Р+1)п
-р -т
Коб
(Тоб Р + 1)
е Рг
1 Т3
где Коб, T06.f - параметры обьекта регулирования,
Регулирующий орган 9 описывается передаточной функцией
W (Р)Ро Кр0.
ИМ 4 постоянной скорости описывается передаточной функцией
W(P,M - .
I им г
где Тим - постоянная интегрирования.
САР, содержащая регулирующее устройство с импульсным выходным сигналом ИМ, выполняет функцию преобразователя импульсного входного сигнала в непрерывный (фиг. 2).
ПУЗ является релейным трехпозици- онным усилителем мощности, имеющим статическую характеристику для электрического входного и выходного сигналов, показанную на фиг. 3.
В динамике ПУ выполняет функции повторителя импульсных сигналов и регулирующего устройства или импульсных команд ручного управления, амплитуда которых постоянна, а длительность и период повторения (следования) являются переменными величинами.
Блок ручного управления выполняет функции для переключения САР из режима автоматического регулирования на ручное управление (размыкание системы). Регулирующее устройство 1 с импульсным выходным сигналом выполняет функции ШИМ.
В САР совместно с ИМ постоянной скорости реализован регулятор с одним из ли- нейных законов регулирования:
W(P)per -- Со
для И- регулятора;
15 W(P)per -( С1)-для ПИ-регулятора;
-( + Ci+C2-P)W (P)per
для ПИД-регулятора.
0
5
0
5
0
5
0
5
где Со, Ci, C2 параметры настройки.
Например, динамическая характеристика ШИМ при реализации И- и ПИ-зако- нов имеет вид, показанный на фиг. 4, при скачке непрерывного сигнала на входе.
В замкнутой САР ШИМ формирует последовательности импульсных сигналов различного знака Больше или Меньше в зависимости от знака сигнала рассогласования.
На фиг. 7 переходные процессы изображены соответственно в точках ±ХР; Хро и Хрп (+Хрп Больше, - Хр Меньше) согласно фиг. 1.
Регулирующее устройство (ШИМ) выделено из линейного регулятора (линейной части САР), поэтому рассматриваемую САР можно представить согласно фиг. 5.
Устройства 5-7 (фиг. 5) для осуществления предлагаемого способа в целом представляют совместно отдельное устройство, подключаемое к САР между регулирующим устройством 1 и блоком 2 ручного управления при отключенной САР на период подготовки к работе. На работающей САР переключатель 5 находится в положении фиг. 1.
Временная диаграмма работы устройства в период определения измеряемых параметров показана на фиг. 6, где а - команда начала подачи возмущения; б - положение нормально разомкнутого контакта переключателя 5; в-импульсный сигнал испытательного возмущения на выходе формирователя 6; Т - период измерения параметров с помощью измерителя 7.
При необходимости нанесения возмущения другого знака на выходе формирователя 6 появляется аналогично импульс противоположного знака - (Меньше). В качестве последнего может быть использо ван, например, одновибратор с регулируемой длительностью формируемого импульса, имеющий трехпозиционный выход и соответствующий по параметрам регулирующему устройству 1.
В качестве переключателя может быть использовано, например, реле, связанное с работой формирователя 6.
В качестве измерителя 7 могут быть использованы различные устройства, преиму- щественно цифровые секундомеры (миллисекундомеры) в режиме суммирования длительности измеряемых импульсных сигналов. При этом они могут располагать также возможностью хранения полученных результатов измерений.
Формула изобретения
Способ определения прямых пока- зателей качества регулирования промышленных автоматических систем, заключающийся в том, что отключают выход регулирующего устройства с импульсным входным сигналом от входа исполнитель- ного механизма постоянной скорости подают испытательный скачок возмущения в течение промежутка времени tu на вход исполнительного механизма постоянной скорости, по окончании момента времени tB подключают выход регулирующего устройства с импульсным выходным сигналом к входу исполнительного механизма постоянной скорости, измеряют параметры переходного процесса, отличающийся
тем, что, с целью повышения эффективности контроля качества регулирования и надежности промышленных автоматических систем, после замыкания системы измеряют в темпе процесса величины длительностей широтно-модулированных последовательностей импульсов ДТч-ДТм, сформированных регулирующим устройством в одной из точек замкнутой системы на участке от выхода регулирующего устройства до исполнительного механизма постоянной скорости, до полного затухания переходного процесса, и определяют величину степени затухания переходного процесса
Чг Л11
АТз
тг
коэффициента
перерегулироваp |Ikx,oo%.
продолжительность воздействия регулирующего устройства с импульсным выходным сигналом
AT2 ATi + ...+ Л TN, продолжительность воздействия регулирующего устройства с импульсным выходным сигналом с учетом величины испытательного скачка возмущения
д1
А tB 
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ВНУТРЕННЕЙ ЕМКОСТНОЙ ЭНЕРГИЕЙ ОБЪЕКТА С ПЕРЕМЕННЫМИ ПАРАМЕТРАМИ | 2010 |
|
RU2474857C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2000 |
|
RU2172857C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2014 |
|
RU2550407C1 |
| Способ стабилизации постоянного напряжения и устройство для его осуществления | 1974 |
|
SU693352A1 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| Способ автоматического регулирования выходного параметра объекта управления по возмущению на входе | 1990 |
|
SU1783472A1 |
| СПОСОБ КАСКАДНОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ПАРАМЕТРА ТЕПЛОЭНЕРГЕТИЧЕСКОГО ОБЪЕКТА | 1991 |
|
RU2049290C1 |
| Способ управления турбиной и устройство для его осуществления | 2019 |
|
RU2730088C1 |
| Автоматический регулятор | 1989 |
|
SU1786467A1 |
Изобретение относится к промышленным системам автоматического регулирования , осуществляющих поддержание заданного значения регулируемого параметра на выходе инерцеонного объекта с запаздыванием. Цель изобретения - повышение эффективности контроля качества регулирования и надежности промышленных автоматических систем регулирования. Для этого необходимо определить сумманую длительность каждой последовательности импульсных сигналов, сформированных регулирующим устройством на его выходе в результате обработки промышленной автоматической системой регулирования скачка испытательного возмущения, приложенного к входу объекта, а также определить величину продолжительности воздействия на исполнительный механизм постоянной скорости. Прямые показатели качества регулирования определяются по изменению величины длительности первой, второй и третьей последовательности импульсных сигналов, а дополнительный показатель, характеризующий продолжительность воздействия регулирующего устройства на исполнительную часть системы, определяется отношением суммарной длительности всех последовательностей импульсных сигналов на выходе регулирующего устройства к продолжительности действия скачка испытательного возмущения. 7 ил.
X3odj
фигЛ
tons to
Фиг. 2
-I6J
fXp| i
Xp
ТПППГ
Xjai . « i
:h
+ 1
ny
TT
t
W
Xp
Xp
Непрерыбная часть
ХРП
+ |Х,
III
Фиг.5
Фие.б
| Кулаков Г.Т | |||
| Инженерные экспресс-методы расчета промышленных систем регулирования | |||
| Справочник-пособие.-Минск: Высшая школа, 1984, с | |||
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| Справочник по наладке автоматических устройств контроля и регулирования | |||
| - Киев: Наукова думка, 1981, ч | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Улей | 1923 |
|
SU822A1 |
