1.
Изобретение относится к самонастраивающимся системам управления с переменной структурой и может быть .использовано для автоматизации нестационарных технологических процессов с изменяющимся запаздыванием, в частности для автоматизации управления тепловыми процессами энергоблоков .
Цель изобретения - повышение быстродействия и динамической точности в широком диапазоне изменения характеристик объекта.
На фиг, 1 изображена структурная схема адаптивной системы управления для объектов с запаздыванием; на фиг. 2 - структурная схема блока подстройки эквивалентной постоянной времени; на фиг. 3. и 4 - структурные схемы соответственно блока подстройки запаздывания и блока подстройки коэффициентов; на фиг. 5 и 6 - функциональные схемы соответственно переключателя структуры и блока управления оператора.
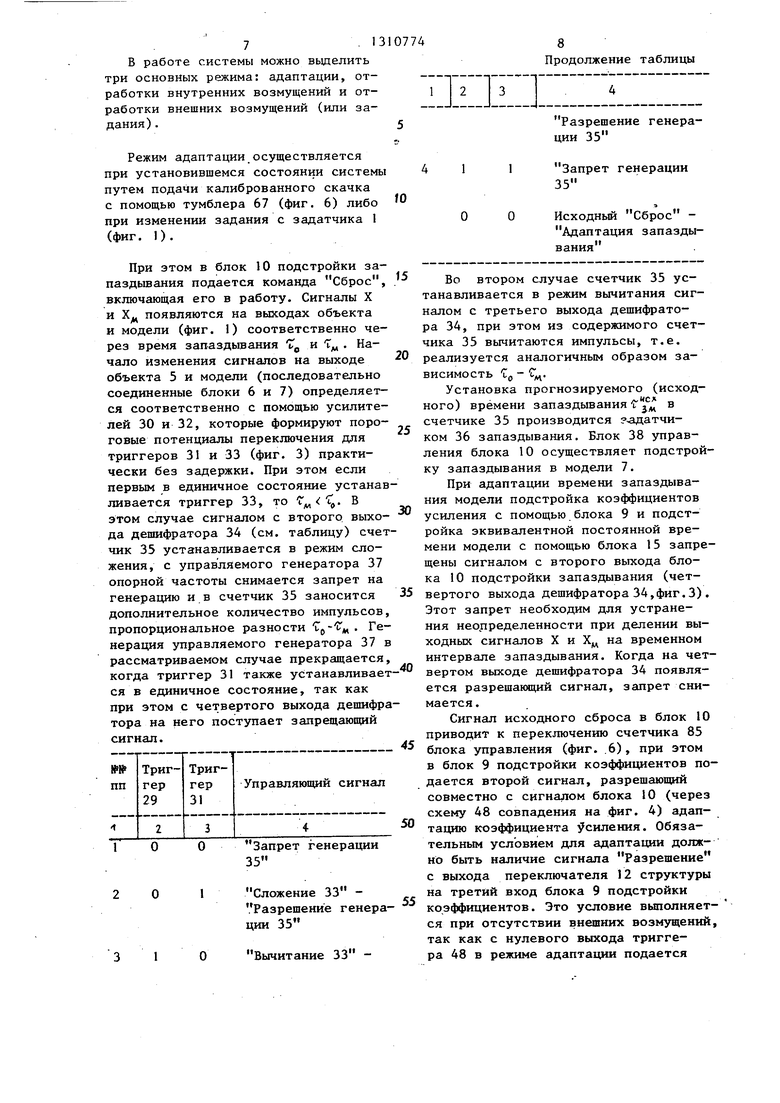
На фиг. 1 обозначены задатчик i, сравнивающий элемент 2, блок 3 умножения, регулятор 4, объект 5, первый упредитель 6, модель 7 с регулируемым запаздыванием, второй упредитель 8, блок 9 подстройки коэффициентов, блок 10 подстройки запаздывания, дифференциатор 11, переключатель 12 структуры, нормально открытый 13 и нормально закрытый 14 контакты переключателя структуры, блок 15 подстройки эквивалентной постоянной времени, блок 16 управления датчик 17 нагрузки и датчик 18 расхода топлива.
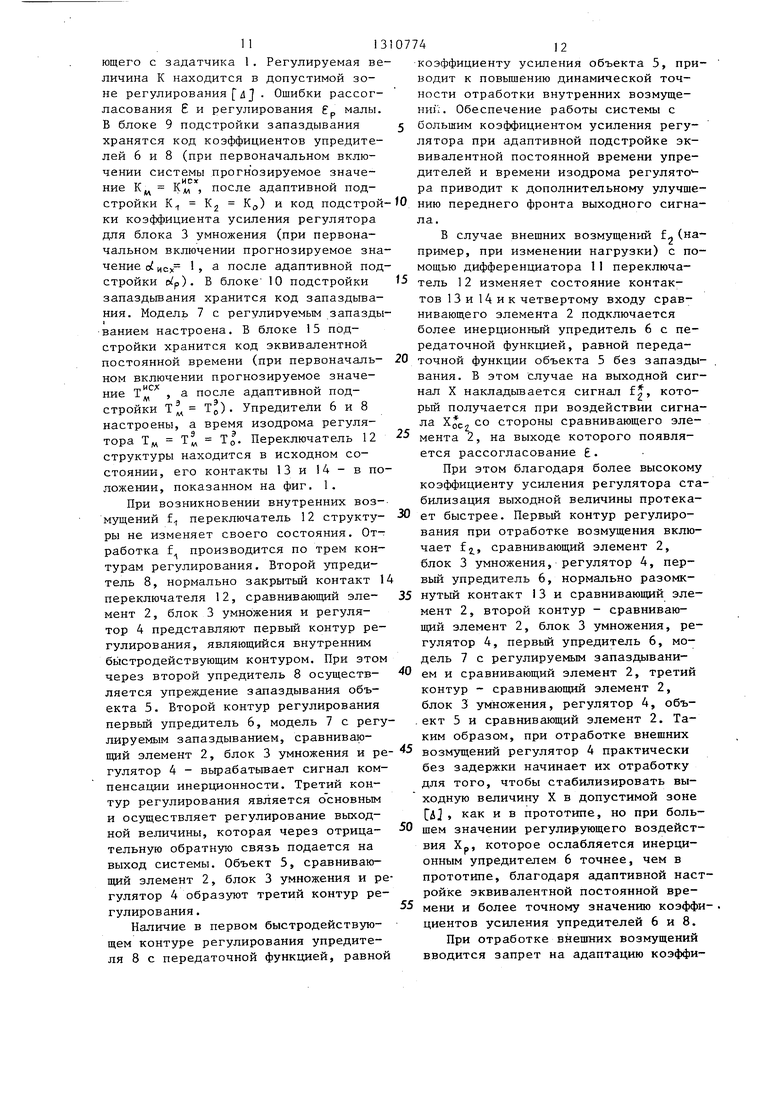
Блок подстройки эквивалентной постоянной времени (фиг. 2) содержит первый 19 и второй 20 сумматоры, задатчик 21 калиброванного скачка, первый блок 22 деления, первый блок 23 умножения, регистр 24, первьй цифро- аналоговьй преобразователь 25, задатчик 26 кода, а также первый 27, вто- р.ой 28 и третий 29 элементы И.
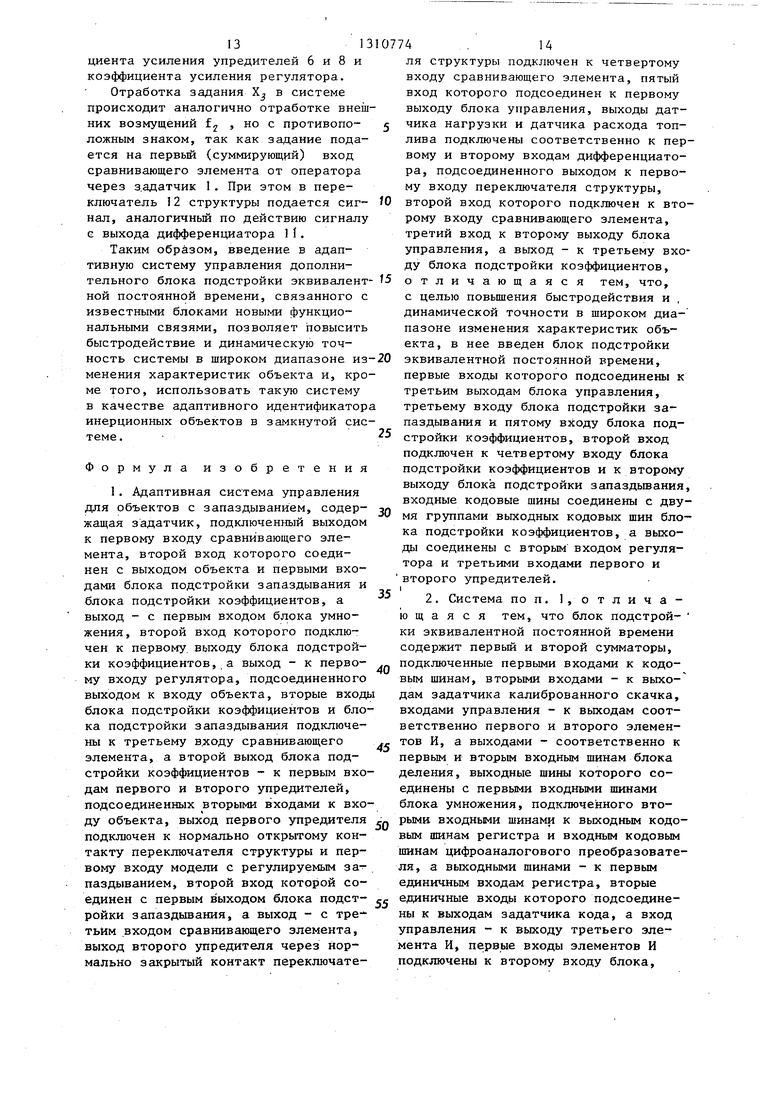
Блок подстройки запаздывания (фиг. включает первьш усилитель 30, первый триггер 31, второй усилитель 32, второй триггер 33, первый дешифратор 34, счетчик 35, задатчик 36 запаздывания, управляемый генератор 37 опорной частоты и блок 38 управления блока подстройки запаздывания.
7742
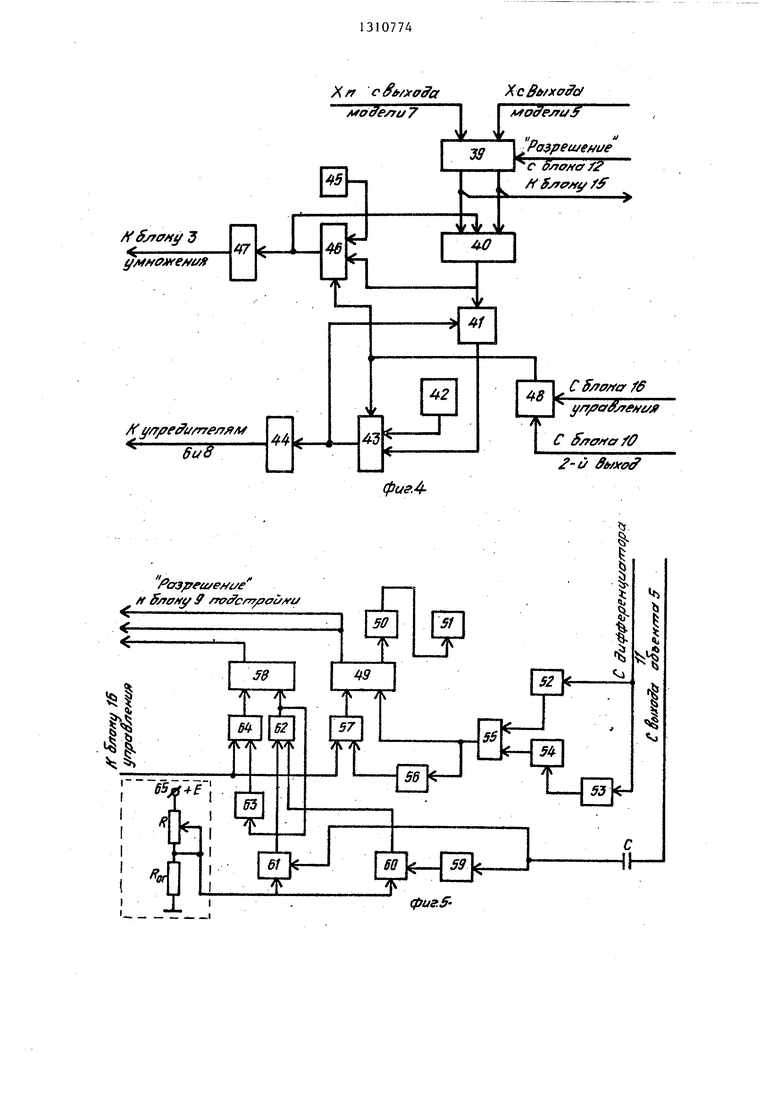
Блок подстройки коэффициентов .(фиг. 4) образуют аналого-цифровой преобразоватегль 39, второй блок 40 деления, второй блок 41 умножения, за,цатчик 42 коэффициентов, второй регистр 43, второй цифроаналоговый преобразователь 44, задатчик 45 коэффициента подстройки коэффициента деления регулятора, третий регистр 46,
0 третий цифрраналоговьм преобразователь 47 и элемент 48 совпадения.
Переключатель структуры (фиг. 5) содержит триггер 49 внешних возмущений, третий усилитель 50, герконовое
5 реле 51, первьй формирователь 52, первьш инвертирующий усилитель 53, второй формирователь 54, первый элемент ИЛИ 55, первый элемент НЕ 56, второй элемент ИЛИ 57, триггер 58
0 внутренних возмущений, второй инвертирующий усилитель 59, первый.компаратор 60, второй компаратор 61, третий элемент ИЛИ 62, второй элемент НЕ 63, четвертый элемент ИЛИ 64 и де- литель 65 напряжения.
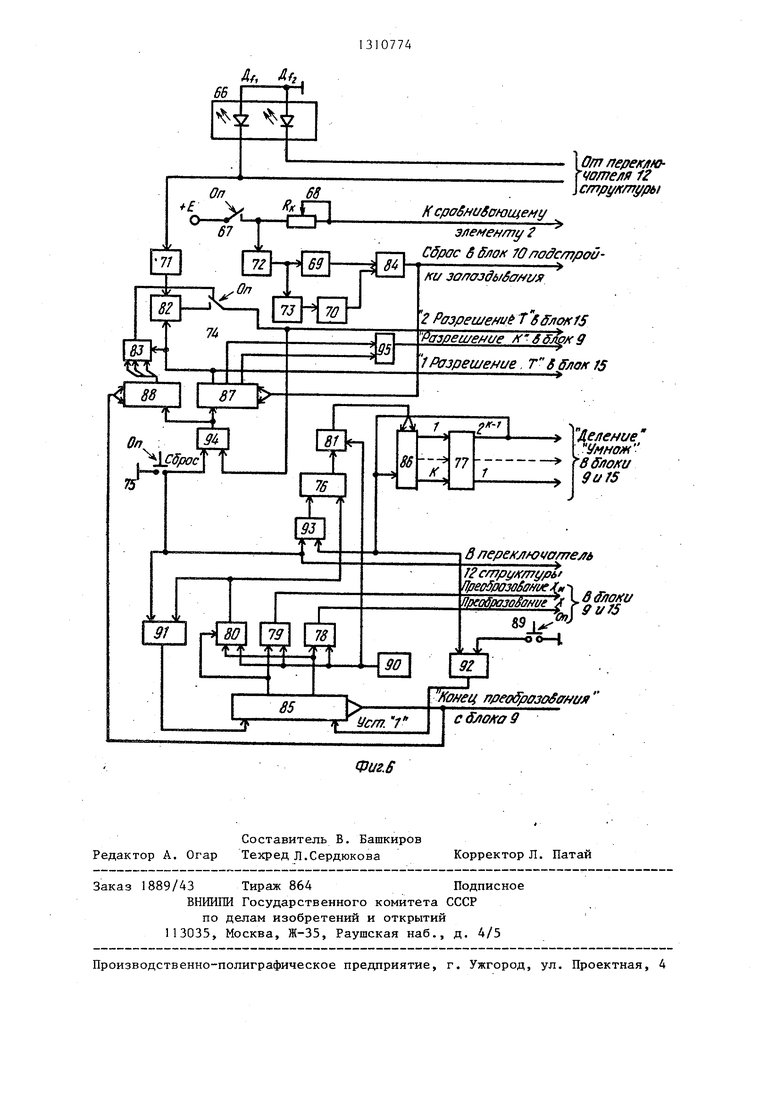
На фиг. 6 обозначены блок 66 индикации, первый тумблер 67, переменный резистор 68, первьй 69, второй 70 и третий 71 элементы задержки, третий 72 и четвертый 73 элементы НЕ, второй тумблер 74, первая кнопка 75, триггер 76 управления, второй дешифратор 77, четвертый 78, пятый 79, шестой 80, седьмой 81, восьмой 82, де5 вятый 83 и десятьй 84 элементы И, первый 85, второй 86, третий 87 и четвертый 88 счетчики управления,вторая кнопка 89, генератор 90 импульсов, а также пятый 91, шестой 92,
0 седьмой 93, восьмой 94 и девятый 95 элементы ИЛИ.
Построение адаптивной, системы управления для объектов с запаздыванием основано на принципе упреждения
запаздывания и компенсации инерционности, при адаптивной подстройке времени запаздывания модели с регулируемым запаздыванием, коэффициентов усиления упредителей и регулятора, а также эквивалентных постоянных времени упредителей и времени изодрома регулятора с переключением структуры упредителей в зависимости от вида возмущений.
5 Объекты с запаздыванием, например теплоэнергетические, могут быть аппроксимированы следующей передаточной функцией:
0
0
Wo
где К
о
Исходя из структурной системы (фиг. I) можно записать изображения сигналов в следующем виде:
(2) (3)
(4) (5)
м
Q редаточные функции первого 6 и второ- го 8 упредителей;
величина времени
an запаздывания моде- -
ли 7;
переключательная функция, которая принимает два зна35() 0 45
чения:
о; о.
где Xj - задание.
Из (1)-(6) следуют условия .упреждения запаздывания и компенсации инерционности
(7)
Wo W
м
и U
W 5 W,
ткуда вытекает, что
0
Ко К
т:
(Л )
и
J
(8)
(9) (10)
(11)
35 () 0 45
50
Передаточная функция второго упреителя в общем случае может быть вырана в виде g
Км(ТзтР+0,,,,55
Kf 2 Т, Т ,э
W,
(12)
де Т
зт
и
Т - м
эквивалентные постоянные времени эталонного
процесса и упредителя етственно, соответствует
(13)
(14)
(14) являются причем условие (13)
приводит к Wy0
устраняется неvn УПл то требует переключения структуры упредителей, но приводит к наилучшей отработке внутренних возмущений, а передаточная функция вида W-y/7i W о - к наилучшей отработке внешних возмущений.
При уп м 0 переходный процесс системы протекает без перерегулирования и при достаточно большом коэффициенте усиления регул ятора
Т Т эт-
О
(15)
an -
Это условие свидетельствует, что при Wy Кр предельной переходной характеристикой замкнутой системы является переходная характеристика инерционного объекта при подаче на него соответствующего калиброванного
1 3
I
скачка, и позволяет определить Тр в 35 замкнутой системе при Wyf,,., Kg. i В основу адаптивной подстройки ос- новньк параметров системы положен ) принцип самонастройки по прогнозируемым моделям, причем в первоначаль- 0 ный момент работы прогнозируемые значения параметров равны исходным значениям, установленным оператором, а в последующие циклы - значениям параметров, полученным в предыдущие 45 циклы адаптации. Адаптация эквивалентной постоянной времени моделей производится по формуле
-S X V ,3f. ч TO (tj )
50
1 (t ) T (t- ) i2.bU . T(t.) ., T(t.)
(16)
Адаптация времени- запаздывания производится по формуле
м
(tp де tj и
To(tj),(17)
J-1
b«(tj-i)t4t (tp
текущий и предыдущий циклы адаптации, при j 1 имеет место первоначальный цикл адаптации, при котором
«ск
м ;
(tj-l)
dt |T,(tp - t« (t-)|.
Адаптация коэффициентов усиления осуществляется непрерывно с частотой квантования входнь1х аналоговых сигналов с выхода объекта (Х(,) и полной модели объекта (Xд) по формуле
К(Т ) ) K,,j(T)
к к Xod) К,(Т К,(ТГ-.) 1 (18)
,-;
к 1 где Т ; -р- - период квантования
входных сигналов; К к Т; И Tj - текущий и предыдущий
циклы адаптации, при i 1 имеет место первоначальный цикл адаптации коэффициентов усиления, при котором
нсх K(Tj.) К j о
Адаптация коэффициента усиления регулятора осуществляется с помощью коэффициента подстройки коэффициента усиления регулятора dp по формуле
ctp(T.) .,) ||-| , (19)
причем при i 1 .(Т)
При вьшолнении условий (7) и (8) имеет место компенсация инерционности и упреждения запаздывания. При этом сигнал с второго упредителя является по существу предсказанием значения выходного сигнала X на временном интервале с, . Он информирует регулятор о влиянии оказанного им управляющего воздействия на регулируемую переменную. Поэтому регулятор не вызьшает перерегулирование при заданном значении сигнала рассогласования Обратная связь по регулируемой переменной необходима для того, чтобы чувствовать влияние возмущений, дей- ствуюищх на объект. Наличие обратной связи Х0(-обусловливает необходимость включения сигнала обратной связи Х Хр для предотвращения двухкратной реакции регулятора на собственно регулирующее воздействие (с выхода упредителя) и на обратную связь XQC через время 0.
Таким образом, если условия (7) и (8) выполняются, то структурная схема системы (фиг. I) может быть преобразована в схему, в которой за- паздьгоание вьшосится за контур регу
. W
15
25
07746
лирования. Это позволяет выбрать передаточную функцию регулятора так, как если бы процесс не имел запаздывания.
5 Фактически реакция замкнутой системы X является в этом случае задержанной версией реакции системы без запаздывания. Система при этом способна работать с максимальной скоростью и имеет лучшую реакцию.
Дополнительное введение адаптивной подстройки эквивалентной постоянной времени модели системы (первого 6 и второ го 8 упредителей) и времени изодрома наряду с адаптивной подстройкой времени запаздывания и- коэффициентов усиления позволяет сохранять первоначально заданное быстродействие системы в любом диапазоне
20 изменения К, Т и Тд.
Переключение структуры упредителей позволяет, как и в прототипе, повысить точность при отработке как внутренних, так и внешних возмущений ,
. Адаптивная система управления для объектов с запаздыванием работает следующим образом.
30 рВ исходном состоянии системой
произведена отработка задания Xj, поступающего с задатчика 1, или внутренних возмущений f , или внешних f. (фиг. 1). Регулируемая величина X находится в допустимой зоне регулирования , Ощибки рассогласования и регулирования р малы. В блоке 9 подстройки коэффициентов хранятся коды усиления упредителей 6 и 8- (при первоначальном включении - прогнозируемые значения К мисх после адаптивной подстройки - К у, К,Кд) и код подстройки коэффициента усиления регулятора 4 (при первоначаль-, ном включении - прогнозируемое значение, например о/„|-, 1, а после адаптивной подстройки dp). Переключатель 12 находится в исходном со-, стоянии, его контакты 13 и 14 - в положенииJ показанном на фиг. I. В установивщемся состоянии триггеры 49 и 58 переключателя 12 находятся в единичном состоянии (фиг, 5). В блоке 0 хранится код запаздывания: при первоначальном включении системы - прогнозируемое значение, а после адаптивной подстройки t L Q . Модель 7 настроена.
40
45
50
55
В работе системы можно выделить три основных режима: адаптации, отработки внутренних возмущений и отработки внешних возмущений (или задания) .
Режим адаптации,осуществляется при установившемся состоянии системы путем подачи калиброванного скачка с помощью тумблера 67 (фиг. 6) либо при изменении задания с задатчика 1 (фиг. 1).
При этом в блок 10 подстройки запаздывания подается команда Сброс, включающая его в работу. Сигналы X и Х появляются на выходах объекта и модели (фиг. 1) соответственно через время запаздьшания Т и Т . Начало изменения сигналов на выходе объекта 5 и модели (последовательно соединенные блоки 6 и 7) определяется соответственно с помощью усилителей 30 и 32, которые формируют пороговые потенциалы переключения для триггеров 31 и 33 (фиг. 3) практически без задержки. При этом если первым в единичное состояние устанавливается триггер 33, то . В этом случае сигналом с второго выхо да дещифратора 34 (см. таблицу) счетчик 35 устанавливается в режим сложения, с управляемого генератора 37 опорной частоты снимается запрет на генерацию ив счетчик 35 заносится дополнительное количество импульсов, пропорциональное разности , . Генерация управляемого генератора 37 в рассматриваемом случае прекращается, когда триггер 31 также устанавливает ся в единичное состояние, так как при этом с четвертого выхода дешифратора на него поступает запрещающий сигнал.
-
О
О
Запрет генерации 35
О
Сложение 33 ции 35
Вычитание 33 Сигнал исходного сброса в блок 10 приводит к переключению счетчика 85 блока управления (фиг. .6), при этом в блок 9 подстройки коэффициентов подается второй сигнал, разрешающий совместно с сигналом блока 10 (через схему 48 совпадения на фиг. 4) адаптацию коэффициента : силения. Обязательным условием для адаптации должно быть наличие сигнала Разрешение с выхода переключателя 12 структуры на третий вход блока 9 подстройки
Разрешение генера- коэффициентов. Это условие выполняется при отсутствии внешних возмущений, так как с нулевого выхода триггера 48 в режиме адаптации подается
:Е:Е::
8 Продолжение таблицы
4
Разрешение генерации 35
Запрет генерации 35
т
Исходный Сброс - Адаптация запаздывания
20
25
/30
35
40
45
50
Во втором случае счетчик 35 устанавливается в режим вычитания сигналом с третьего выхода дешифратора 34, при этом из содержимого счетчика 35 вычитаются импульсы, т.е. реализуется аналогичным образом зависимость TU - С.
Установка прогнозируемого (исходного) времени запаздывания С в счетчике 35 производится адатчи- ком 36 запаздывания. Блок 38 управления блока 10 осуществляет подстройку запаздывания в модели 7.
При адаптации времени запаздывания модели подстройка коэффициентов усиления с помощью блока 9 и подстройка эквивалентной постоянной времени модели с помощью блока 15 запрещены сигналом с второго выхода блока 10 подстройки запаздывания (четвертого выхода дещифратора 34,фиг.3) . Этот запрет необходим для устранения неопределенности при делении выходных сигналов X и Хцд на временном интервале запаздывания. Когда на четвертом выходе дешифратора 34 появляется разрешающий сигнал, запрет снимается.
Сигнал исходного сброса в блок 10 приводит к переключению счетчика 85 блока управления (фиг. .6), при этом в блок 9 подстройки коэффициентов подается второй сигнал, разрешающий совместно с сигналом блока 10 (через схему 48 совпадения на фиг. 4) адаптацию коэффициента : силения. Обязательным условием для адаптации должно быть наличие сигнала Разрешение с выхода переключателя 12 структуры на третий вход блока 9 подстройки
разрешающий сигнал. Адаптация коэффициентов осуществляется в циклом Т, при этом в каждом цикле адаптации преобразуется два сигнала: с выхода объекта 5 (X) и с выхода модели 7 с регулируемым запаздыванием, выход которой является выходом полной модели (Хд). Значения X и Х при наличии сигнала Разрешение на управляющем входе аналого-цифрового преобразователя 39 (фиг. 4) поступают is цифровой форме в блок 40 деления, где находится отношение сигналов Х/Х„, которое
м
передается в блок 41 умножения. Далее в блоке 40 деления определяется коэффициент oLp путем деления исходного значения (или значения-предыдущего цикла) на отношение Х/Х,. Новое значение dp (Т,- ) передается во второй регистр 46. В блоке 41 аналогичным образом, но путем умножения ист,- ИСХ /
ходного значения К f (или значения предыдущего цикла ) на отношение Х/Х определяется коэффициент К Кр. Новое значение Кр(Т,- ) передается в первый регистр 43. Из первого 43 и второго 46 регистров значения коэффициентов очередного цикла адаптации поступают в цифроаналоговые преобразователи 44 и 47. Первый цифроанало- говый преобразователь 44 (фиг. 4) .используется для подстройки упреди- телей 6 и 8. Второй цифроаналоговый преобразователь предназначен для подстройки блока 3 умножения. Для занесения прогнозируемых (исходных) значений коэффициентов используются за- датчики 42 и 45.
Второй этап адаптации связан с отключением оператором пробного скачка с помощью тумблера 67 (фиг. 6) при светящихся светодиодах блока 64 индикации. В этом случае в блоке 16 управления формируется второй сигнал Сброс в блок 10 подстройки запаздывания, а счетчик 87 управления переключается в состояние, при котором разрешена адаптация эквивалентной постоянной времени модели (упредите- лей). Однако, как и при адаптации коэффициента усиления, для адаптации эквивалентной постоянной времени не- обходимо выполнение еще одного условия: окончания процесса адаптации
JO
15
20
25
30
35
40
калиброванного скачка. На первых входах элементов И 27-29 находится разрешающий сигнал с блока 10 об окончании адаптации времени запаздывания, на вторых входах элементов И - сигналы 1 разрешение Tj с третьего выхода счетчика 85 блока 16 управления (фиг. .6). Разрешающие сигналы 1 Разрешение X и 2 Разрешение Хд,, поступая попеременно с выходов элементов И 27 и 28, управляют занесением в первый 19. и второй 20 сумматоры соответственно кодов X и Х с выходных кодовых шин блока 9 подстройки коэффициентов.
Сумматоры 9 и 20 определяют разность величин, причем выходные коды сумматоров 19 и 20 подаются на выходы блока 22 деления с нулевых выходов.
В результате каждого цикла преобразования производятся вычисления с помощью блока 22 деления, блока 23 умножения и регистра 24, но результат вычислений не заносится в регистр 24, так как не является окончательными в каждом цикле двух преобразований X и Х„ (в отличие от адапта- ции коэффициентов усиления). Окончательный результат вычисления фиксируется только по завершении переход- о чем свидетельствует
J , поступающий на второй вход элемента И 29 с выхода блока 16 управления. Этот сигнал через элемент И 29 проходит на синхровход регистра 29, осуществляя занесение в него нового значения кода эквивалентной постоянной времени. Первоначальное (промежуточное) значение Т заносится в регистр 24 с помощью задатчика 26 кода. Выходы регистра 29 управляют цифроаналоговым преобразователем 25, который по трем каналам осуществляет подстройку эквивалентных постоянных времени первого 6 и второго 8 упредителей и времени изодрома регулятора 4.
По окончании адаптации эквивалент- ной постоянной времени блок 16 управления устанавливается в О, что приводит к появлению сигнала Разрешение К, который разрешает адаптацию только коэффициента усиления.
ного процесса,
сигнал 2 Разрешение Т
45
времени запаздывания. При этом блок Это состояние системы является ис- (фиг. 2) работает следующим образом. ходным.
В первый 19 и второй 20 суммато- В исходном состоянии системой про- ры с помощью задатчика 2 занесен код ; изведена отработка задания, поступаO
5
0
5
0
5
0
калиброванного скачка. На первых входах элементов И 27-29 находится разрешающий сигнал с блока 10 об окончании адаптации времени запаздывания, на вторых входах элементов И - сигналы 1 разрешение Tj с третьего выхода счетчика 85 блока 16 управления (фиг. .6). Разрешающие сигналы 1 Разрешение X и 2 Разрешение Хд,, поступая попеременно с выходов элементов И 27 и 28, управляют занесением в первый 19. и второй 20 сумматоры соответственно кодов X и Х с выходных кодовых шин блока 9 подстройки коэффициентов.
Сумматоры 9 и 20 определяют разность величин, причем выходные коды сумматоров 19 и 20 подаются на выходы блока 22 деления с нулевых выходов.
В результате каждого цикла преобразования производятся вычисления с помощью блока 22 деления, блока 23 умножения и регистра 24, но результат вычислений не заносится в регистр 24, так как не является окончательными в каждом цикле двух преобразований X и Х„ (в отличие от адапта- ции коэффициентов усиления). Окончательный результат вычисления фиксируется только по завершении переход- о чем свидетельствует
J , поступающий на второй вход элемента И 29 с выхода блока 16 управления. Этот сигнал через элемент И 29 проходит на синхровход регистра 29, осуществляя занесение в него нового значения кода эквивалентной постоянной времени. Первоначальное (промежуточное) значение Т заносится в регистр 24 с помощью задатчика 26 кода. Выходы регистра 29 управляют цифроаналоговым преобразователем 25, который по трем каналам осуществляет подстройку эквивалентных постоянных времени первого 6 и второго 8 упредителей и времени изодрома регулятора 4.
По окончании адаптации эквивалент- ной постоянной времени блок 16 управления устанавливается в О, что приводит к появлению сигнала Разрешение К, который разрешает адаптацию только коэффициента усиления.
ного процесса,
сигнал 2 Разрешение Т
5
Это состояние системы является ис- ходным.
111310774
ющего с задатчика 1. Регулируемая величина К находится в допустимой зоне регулирования 3 Ошибки рассог12
ласования Е и регулирования „ малы. В блоке 9 подстройки запаздывания хранятся код коэффициентов упредите- лей 6 и 8 (при первоначальном вклюзначе-подчении системы прогнозируемое ние К,. Ku после адаптивной
«л
M
коэффициенту усиления объекта 5, приводит к повышению динамической точности отработки внутренних возмуще- ни1;. Обеспечение работы системы с большим коэффициентом усиления регулятора при адаптивной подстройке эквивалентной постоянной времени упре- дителей и времени изодрома peгyлятo - ра приводит к дополнительному улучше- стройки К К К(,) и код подстрой- 0 нию переднего фронта выходного сигна- ки коэффициента усиления регулятора ла. для блока 3 умножения (при первоначальном включении прогнозируемое значение 0 цсх 1 , а после адаптивной подстройки dp), В блоке 10 подстройки 15 запаздьшания хранится код запаздывания. Модель 7 с регулируемым запазды1
ванием настроена. В блоке 15 подстройки хранится код эквивалентной постоянной времени (при первоначаль- прогнозируемое значеВ случае внешних возмущений f-(на20
ном включении
исх ние Т.. , а после
,3 ГТ.Э м
адаптивной пода время изодрома регуля- Т TO. Переключатель 12
стройки Т TO). Упредители 6 и настроены тора Т„
структуры находится в исходном состоянии, его контакты 13 и 14 - в положении, показанном на фиг. 1.
При возникновении внутренних воз-- мущений f переключатель 12 структуры не изменяет своего состояния. Отпример, при изменении нагрузки) с помощью дифференциатора 11 переключатель 12 изменяет состояние контактов 13 и 14 и к четвертому входу сравнивающего элемента 2 подключается более инерционный упредитель 6 с передаточной функцией, равной передаточной функции объекта 5 без запаздывания. В этом случае на выходной сигнал X накладьшается сигнал fj, кото- рьш получается при воздействии сигнала ХОР- со стороны сравнивающего эле мента 2, на выходе которого появляется рассогласование .
При этом благодаря более высокому коэффициенту усиления регулятора стабилизация выходной величины протека30 ет быстрее. Первый контур регулирования при отработке возмущения включает f., сравнивающий элемент 2, блок 3 умножения, регулятор 4, первый упредитель 6, нормально разомкработка f производится по трем контурам регулирования. Второй упреди- тель 8, нормально закрытьш контакт 14 переключателя 12, сравнивающий элемент 2, блок 3 умножения и регулятор 4 представляют первый контур регулирования, являющийся внутренним быстродействующим контуром. При этом через второй упредитель 8 осуществляется упреждение запаздывания объекта 5. Второй контур регулирования первый упредитель 6, модель 7 с регулируемым запаздыванием, сравнивающий элемент 2, блок 3 умножения и ре гулятор 4 - вырабатьтает сигнал компенсации инерционности. Третий контур регулирования является основным и осуществляет регулирование выходной величины, которая через отрицательную обратную связь подается на выход системы. Объект 5, сравнивающий элемент 2, блок 3 умножения и ре гулятор 4 образуют третий контур регулирования.
Наличие в первом быстродействующем контуре регулирования упредите- ля 8 с передаточной функцией, равной
-
12
коэффициенту усиления объекта 5, приводит к повышению динамической точности отработки внутренних возмуще- ни1;. Обеспечение работы системы с большим коэффициентом усиления регулятора при адаптивной подстройке эквивалентной постоянной времени упре- дителей и времени изодрома peгyлятo - ра приводит к дополнительному улучше- 0 нию переднего фронта выходного сигна- ла. 15
В случае внешних возмущений f-(на20
пример, при изменении нагрузки) с помощью дифференциатора 11 переключатель 12 изменяет состояние контактов 13 и 14 и к четвертому входу сравнивающего элемента 2 подключается более инерционный упредитель 6 с передаточной функцией, равной передаточной функции объекта 5 без запаздывания. В этом случае на выходной сигнал X накладьшается сигнал fj, кото- рьш получается при воздействии сигнала ХОР- со стороны сравнивающего эле мента 2, на выходе которого появляется рассогласование .
При этом благодаря более высокому коэффициенту усиления регулятора стабилизация выходной величины протека30 ет быстрее. Первый контур регулирования при отработке возмущения включает f., сравнивающий элемент 2, блок 3 умножения, регулятор 4, первый упредитель 6, нормально разомк35 нутый контакт 13 и сравнивающий элемент 2, второй контур - сравнивающий элемент 2, блок 3 умножения, регулятор 4, первый упредитель 6, модель 7 с регулируемым запаздывани-
0 ем и сравнивающий элемент 2, третий контур - сравнивающий элемент 2, блок 3 умножения, регулятор 4, объ- .ект 5 и сравнивающий элемент 2. Таким образом, при отработке внешних 5 возмущений регулятор 4 практически без задержки начинает их отработку для того, чтобы стабилизировать выходную величину X в допустимой зоне Ciil и в прототипе, но при боль-
50 тем значении регулирующего воздействия Хр, которое ослабляется инерционным упредителем 6 точнее, чем в прототипе, благодаря адаптивной настройке эквивалентной постоянной вре55 мени и более точному значению коэффициентов усиления упредителей 6 и 8. При отработке внешних возмущений вводится запрет на адаптацию коэффициента усиления упредителей 6 и 8 и коэффициента усиления регулятора.
Отработка задания в системе происходит аналогично отработке внешних возмущений f , но с противопо- ложным знаком, так как задание подается на первый (суммирующий) вход сравнивающего элемента от оператора через з.адатчик 1 . При этом в переключатель 12 структуры подается сиг- нал, аналогичньй по действию сигналу с выхода дифференциатора 1I.
Таким образом, введение в адаптивную систему управления дополнительного блока подстройки эквивалент- ной постоянной времени, связанного с известными блоками новыми функциональными связями, позволяет повысить быстродействие и динамическую точность системы в широком диапазоне изменения характеристик объекта и, кроме того, использовать такую систему в качестве адаптивного идентификатора инерционных объектов в замкнутой системе .
Формула изобретения
1. Адаптивная система управления для объектов с запаздыванием, содер- жащая задатчик, подключенный выходом к первому входу сравнивающего элемента, второй вход которого соединен с выходом объекта и первыми входами блока подстройки запаздывания и блока подстройки коэффициентов, а выход - с первым входом блока умножения , второй вход которого подключен к первому, выходу блока подстройки коэффициентов, а выход - к перво- му входу регулятора, подсоединенного выходом к входу объекта, вторые входы блока подстройки коэффициентов и блока подстройки запаздывания подключены к третьему в.ходу сравнивающего элемента, а второй выход блока подстройки коэффициентов - к первым входам первого и второго упредителей, подсоединенных вторыми входами к входу объекта, выход первого упредителя подключен к нормально открытому контакту переключателя структуры и первому входу модели с регулируемым за- паздыванием, второй вход которой соединен с первым выходом блока подст- ройки запаздывания, а выход - с тре- тьим входом сравнивающего элемента, выход второго упредителя через нормально закрытый контакт переключате
0
5 0
,
5
ля структур. подключен к четвертому входу сравнивающего элемента, пятый вход которого подсоединен к первому выходу блока управления, выходы датчика нагрузки и датчика расхода топлива подключены соответственно к первому и второму входам дифференциатора, подсоединенного выходом к первому входу переключателя структуры, второй вход которого подключен к второму входу сравнивающего элемента, третий вход к второму выходу блока управления, а выход - к третьему входу блока подстройки коэффициентов, отличающаяся тем, что, с целью повьшения быстродействия и динамической точности в широком диапазоне изменения характеристик объекта, в нее введен блок подстройки эквивалентной постоянной времени, первые входы которого подсоединены к третьим выходам блока управления, третьему входу блока подстройки запаздывания и пятому входу блока подстройки коэффициентов, второй вход подключен к четвертому входу блока подстройки коэффициентов и к второму выходу блока подстройки запаздьшания, входные кодовые шины соединены с двумя группами выходных кодовых шин блока подстройки коэффициентов, а выходы соединены с вторым входом регулятора и третьими входами первого и
второго упредителей.
I
2. Система по п. 1,отлича- ю щ а я с я тем, что блок подстрой- ки эквивалентной постоянной времени содержит первый и второй сумматоры, подключенные первыми входами к кодовым шинам, вторыми входами - к выхо- дам задатчика калиброванного скачка, входами управления - к выходам соответственно первого и второго элементов И, а выходами - соответственно к первым и вторым входным шинам блока деления, выходные шины которого соединены с первыми входными шинами блока умножения, подключенного вторыми входными шинами к выходным кодовым шинам регистра и входным кодовым шинам цифроаналогового преобразователя, а выходньпчи шинами - к первым едд1ничным входам регистра, вторые единичные входы которого подсоединены к выходам задатчика кода, а вход управления - к выходу третьего элемента И, первые входы элементов И подключены к второму входу блока.
151310774,16
первые входы которого .соединены с тов И, а выходы - с выходами цифро- вторыми и третьими входами элемен- аналогового преобразователя.
X С 5л она д
с 9
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1986 |
|
SU1383292A1 |
| Адаптивная система управления | 1985 |
|
SU1257612A1 |
| Адаптивная система управления для объектов с запаздыванием | 1980 |
|
SU1015336A1 |
| Адаптивная система управления | 1983 |
|
SU1174902A1 |
| Система управления для объектов с запаздыванием | 1982 |
|
SU1070506A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ОБЪЕКТОМ С ПЕРЕМЕННЫМ ТРАНСПОРТНЫМ ЗАПАЗДЫВАНИЕМ | 2003 |
|
RU2258950C2 |
| Адаптивная система регулирования для объектов с изменяющимся запаздыванием | 1980 |
|
SU968788A1 |
| Адаптивная система управления для объектов с запаздыванием | 1989 |
|
SU1689920A1 |
| Адаптивная система управления для объектов с запаздыванием | 1983 |
|
SU1161917A1 |
Изобретение относится к самонастраивающимся системам управления с переменной структурой и может быть использовано для автоматизации нестационарных технологических процессов с изменяющимся запаздыванием, в частности для автоматизации управления тепловыми процессами энергоблоков. Цель изобретения,- повьппение быстроХос действия и динамической точности в широком диапазоне изменения характеристик объекта. Адаптивная система управления для объектов с запаздыванием содержит задатчик 1, сравнивающий элемент 2, блок 3 умножения, регулятор 4, объект 5, первый упреди- тель 6, модель 7 с регулируемым запаздыванием, второй упредитель 8, блок 9 подстройки коэффициентов, блок 10 подстройки запаздывания, дифференциатор 11, переключатель 12 структуры, нормально открытый 13 и нормально закрытый 14 контакты переключателя структуры, блок 15 подст- .ройки эквивалентной постоянной времени, блок 16 управления, датчик 17 нагрузки, датчик 18 расхода топлива. Цель изобретения достигается за счет введения блока 15 подстройки эквивалентной постоянной времени. 6 ил. (Л со | | 4 tflUSj
19
20
t
23
26
25
24
26
9
Г2/Ь
27
п
fffu/ /f-XM
я|
/ ,f6
П fb3ffett/e/vt/e
Тз
Po3pea/f t/e Ж
фи&.2
fffr/yf umej ffM 6t/8
фигЗ
X/y c /jrer a
XcB xoffof
/oftfffe u 7
f f
Jff
offejTi/S
n
Ра решемие
r 5/TC/fcff2 /f /
ff7
46 TT
/(
6u8
44
-i
П
}LxLJEL
2
48
C /7ff/fa f6
yfr/ffoA ff/e/
С /fffffa/0
-U ff /ifff
фи&.44л fz
66
i i
68
К сробнибающему
3fleftfeff/ny / Сброс 70 ло с лройffU 3O/7ffJd6/ i7/Vl/Jf
2 Pffjpeu/ew T sffft fS Разреи/effi/e /f S 9
1/ зрешение. Т бУло/г fS
0/n nepeifAfo- чоп7е/1Я // Cfj7pi//(/ny/Ai
йеление Умно/к
BffflOKU
9uJ5
в nepeffjtHJvamejrA I cfrjpc//f/nt/pi,t
fJnonfinfiinitrrui /
dfflOftU
ffi/r5
90 92
rНонец преофозо а/ ия
cd/io/rffff
Составитель В. Башкиров Редактор А. Огар Техред Л.Сердюкова Корректор Л. Патай
Заказ 1889/43 Тираж 864Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг.6
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
