Изобретение относится к строительству и может быть использовано для погрузки, разгрузки и монтажа конструкций, не имеющих монтажных петель и сквозных отверстий.
Цель изобретения - расширение технологических возможностей и сокращение затрат ручного труда.
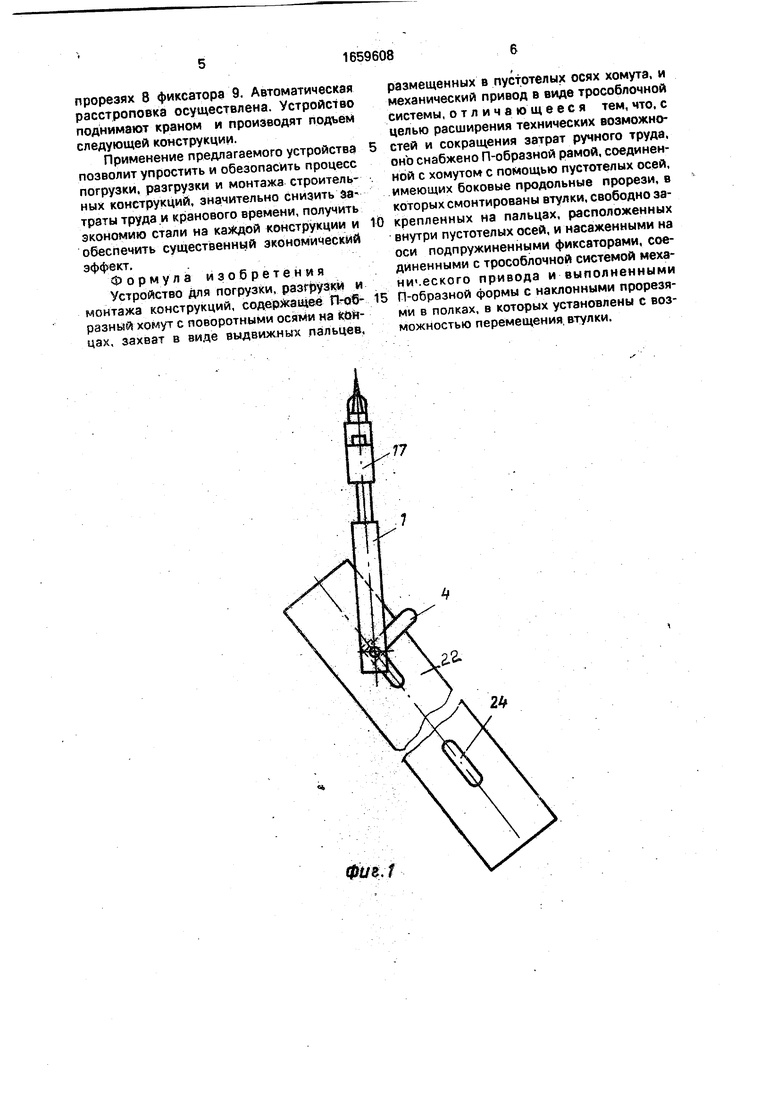
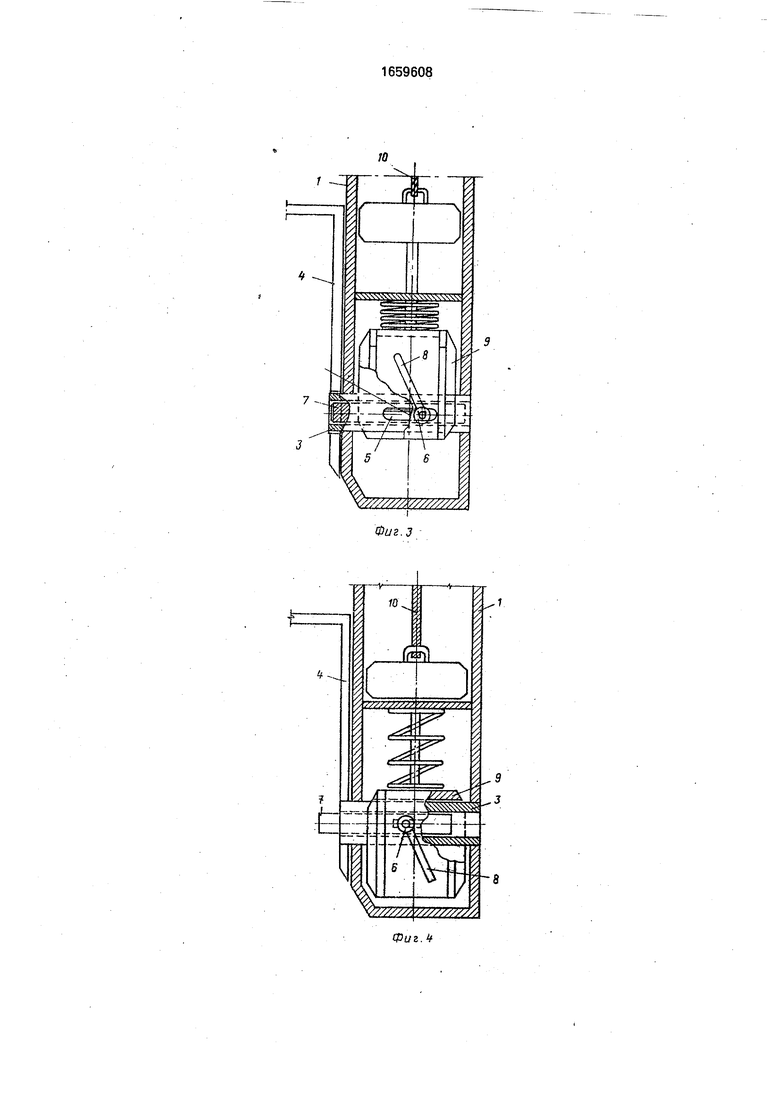
На фиг. 1 изображена схема подъема вертикальной конструкции при помощи предлагаемого уст ройства; на фиг. 2 - П-об- разная рама; на фиг. 3 - П-образный фиксатор и выдвижные пальцы в открытом положении; на фиг. 4 - то же, в закрытом (рабочем)положении; чафиг, 5 -схемастроповки горизонтальной конструкции при помощи предлагаемого устройства.
Устройство содержит П-образную раму 1 с ограничителями 2 поворота соторая посредством пустотелых осей 3 соединена с П-образным хомутом 4. Пустотелые оси 3 имеют боковые продольные прорези 5, в которых размещены втулки 6, свободно закрепленные на выдвижных пальцах 7 Выдвижные пальцы 7 установлены внутри пустотелых осей 3 и расположены в наклонных прорезях 8 П-обрнзного подпружиненного фиксатора 9 с упором. Г -образный подпружиненный фиксатор 9 соединен тро- соблочной системой 1) механического привода.
Механический привод выполнен в виде вилки 11, на которой шэрнирно закреплен диск 12с установленными перпендикулярно боковым граням дв ,м сквозными удлиненными пальцами 13, расположенными диаметрально противоположно, а между ними на одной боковоп грани диска по два укороченных пальца 14, установленных друг от друга нз расстоянии, равном радиусу окружности, по периметру которой все они закреплены.
Вилка 11 установлена с возможностью вертикального перемещения в стакане 15, Пальцы 13 и 14 установлены с возможностью их поочередного взаимодействия с подпружиненной защелкой 16, закрепленной на торцовой стенке проема ГОЛОВКУ 17, а пальцы 13-сседлами 18, установленными на боковых стенках проеме головки 17, Головка 17 установлена с возможностью вертикальногоперемещенияпонаправляющим шпилькам 19 с ограничивающими гайхзми 20. Гсловка 17 снабжена серьгой 21,
Устройство работает следующим образом.
На конструкцию 2, лежащую на подкладках 23, опускают краном устройстве так, чтобы указанная конструкция вошла
между стойками П-образной рамы 1, а хомут 4 касался верхней грани конструкции 22. При дальнейшем опускании устройства хомут 4 поворачивается на 90° и при полном
ее опирании на верхнюю грань конструкции 22 начинает опускаться головка 17, При этом подпружиненная защелка 16 нажимает на укороченный верхний палец 14 и проворачивает диск 12 на величину одного шага
0 между пальцами. Удлиненный палец 13 выходит из зацепления с седлами 18 и диск 12 вместе с вилкой 11 опускаются под собственным весом и под действием подпружиненного П-образного фиксатора 9.
5 Последний, опускаясь, перемещает втулки 6 по наклонным прорезям 9 и выдвигает пальцы 7 в рабочее положение (фиг. 4} Пальцы 7 входят в углубления 24, расположенные на боковых гранях конструкции 22, при
0 зтом происходит автоматическая строповка последней. Конструкцию 22 поднимают краном и устанавливают в требуемое положение при погрузке, разгрузке или монтаже. При подъеме горизонтальных (балоч5 ных) конструкций 22 используют устройство, состоящее из балки 25, подвешенной на крюке крана, и двух П-образных рам 1, закрепленных шарнирно на концах балки 25. При подъеме вертикальных (стоечных) кон0 струкций используют одну П-обрэзную раму 1, подвешенную на крюке крана.
Для снятия устройства с конструкции 22 необходимо балку 25 с П-образными рамами 1 (или одну П-образную раму 1) опустить
5 краном до упора хомута 4 в горизонтальных конструкциях (фиг.5) или П-образной рамы 1 в вертикальных конструкциях (фиг.1), при этом начинает опускаться головка 17. Защелка 16, взаимодействуя с удлиненным
0 пальцем 13, повернет диск на угол 60°, но расстроповка не произойдет, так как напротив седла 18 будет находиться укороченный палец 14 и зацепление его с седлом не произойдет. Это необходимо из условий обес5 печения безопасности работы, чтобы не произошло падение конструкции 22 при случайном ее опирании. Для обеспечения автоматической расстроповки производят подъем балки 25 на 200-250 мм и произво0 дят повторное опускание устройства до опи- рания хомута 4 или П-образной рамы 1 на конструкцию 22. Защелка 16, взаимодействуя с укороченным пальцем 14, повернет диск так, чтобы удлиненный палец 13 ока5 зался на одной вертикали с седлом 18, и при подъеме головки 17 палец 13 попадает в седло 18 и поднимает диск 12 с вилкой 11. При этом тросы 10 поднимают П-образный подпружиненный фиксатор 9, который отво- . дит пальцы 7 за втулки б, расположенные в
прорезях 8 фиксатора 9. Автоматическая расстроповка осуществлена. Устройство поднимают краном и производят подъем следующей конструкции.
Применение предлагаемого устройства позволит упростить и обезопасить процесс погрузки, разгрузки и монтажа строительных конструкций, значительно снизить затраты труда и кранового времени, получить экономию стали на каждой конструкции и обеспечить существенный экономический эффект.
Формула изобретения Устройство для погрузки, разгрузки и монтажа конструкций, содержащее П-о$- разный хомут с поворотными осями на концах, захват в виде выдвижных пальцев,
0
размещенных в пустотелых осях хомута, и механический привод в виде трособлочной системы, отличающееся тем, что, с целью расширения технических возможностей и сокращения затрат ручного труда, оно снабжено П-образной рамой, соединенной с хомутом с помощью пустотелых осей, имеющих боковые продольные прорези, в которых смонтированы втулки, свободно закрепленных на пальцах, расположенных внутри пустотелых осей, и насаженными на оси подпружиненными фиксаторами, соединенными с трособлочной системой механического привода и выполненными П-образной формы с наклонными прорезями в полках, в которых установлены с возможностью перемещения втулки.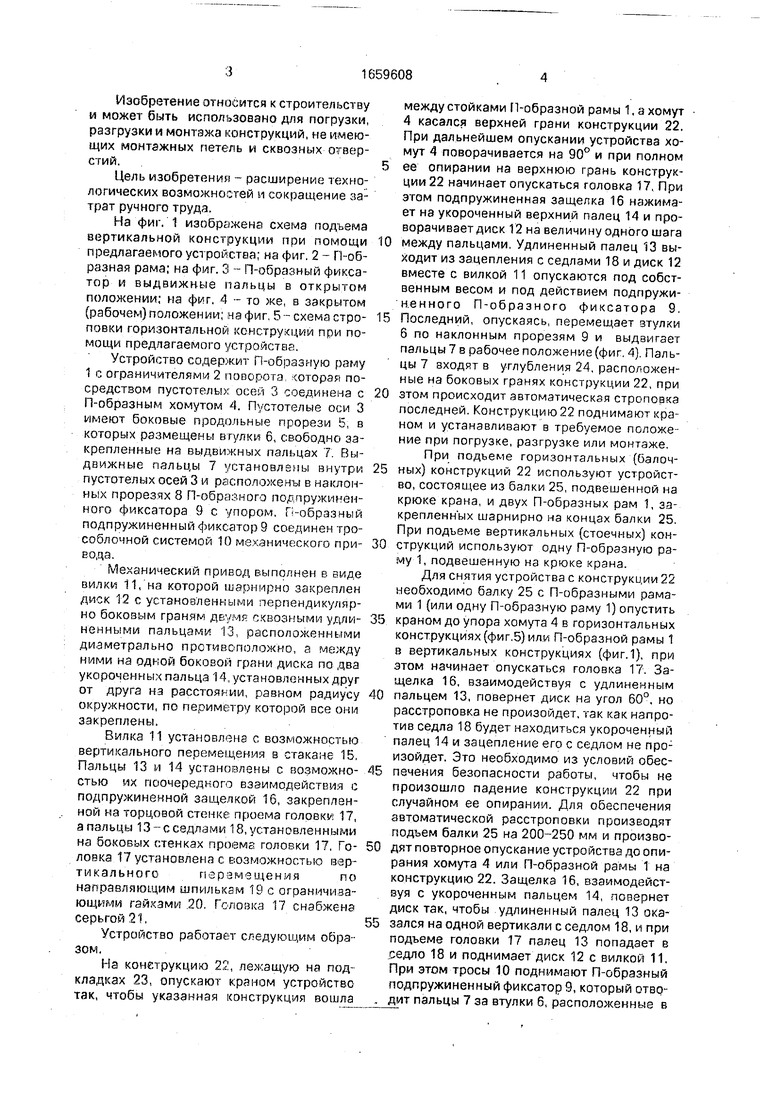
| название | год | авторы | номер документа |
|---|---|---|---|
| Складной контейнер | 1979 |
|
SU929503A1 |
| Устройство для монтажа строительных конструкций | 1981 |
|
SU1008392A1 |
| Кран для погрузки и выгрузки элементов верхнего строения пути | 1977 |
|
SU737347A1 |
| КРАНОВЫЙ ЗАХВАТ ДЛЯ МОНТАЖА КОЛОНН | 1968 |
|
SU219142A1 |
| ШИРОКОЗАХВАТНЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2016 |
|
RU2630458C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| Телескопическая лестница | 1980 |
|
SU949152A1 |
| Складной стоечный поддон | 1990 |
|
SU1781140A1 |
| ШИРОКОЗАХВАТНЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2023 |
|
RU2824207C1 |
| АГРЕГАТ ДЛЯ УБОРКИ СТОГОВ | 1997 |
|
RU2121780C1 |
Изобретение относится к устройствам погрузки, разгрузки и монтажа конструкций. Цель изобретения - расширение технических возможностей и сокращение затрат ручного труда. Устройство содержит П-об- разную раму 1, выдвижные пальцы 7 и механический привод с трособлочной системой 10. П-образная рама 1 выполнена с хомутом 4 и пустотелыми осями с боковыми продольными прорезями, в которых размещены втулки. Пальцы 7 расположены внутри пустотелых осей, каждую из которых охватывает П-образный подпружиненный фиксатор 9с соединенный трособлочной системой 10 с механическим приводом. 5 ил. 10
-77
Ф№,1
9096S9L
| Устройство для подъема и монтажа конструкций | 1980 |
|
SU909081A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| 0 |
|
SU183350A1 | |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
