Фиг.2
передвижения. Поршневые полости ГС 2,3 и 5,6 и их штоковые полости подключены к напорной и сливной магистралям через блоки управления и датчики контроля распора, выполненные в виде регулируемых обратных клапанов. Домкрат передвижения подключен к напорной и сливной магистралям через блок управления. При этом все ГС имеют дополнительные датчики контроля распора, выполненные в виде дополнительного одностороннего гидрозамка 15. Над- клапанная полость последнего соединена через дополнительный обратный клапан 16 со штоковой полостью ГС, а подклапанная полость - с поршневой полостью ГС. Плунжер 17 гидрозамка 15 взаимодействует с упором 18, закрепленным подвижно относительно штока ГС. Блоки управления осуществляют управление распором секций и разгрузкой секций. 2 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидросистема механизированной крепи | 1988 |
|
SU1652601A1 |
| Гидросистема секции механизированной крепи | 1984 |
|
SU1225898A1 |
| Гидравлическая схема крепи сопряжения | 1988 |
|
SU1566044A1 |
| Система гидравлического управления секциями крепи угледобывающего агрегата | 1985 |
|
SU1332035A1 |
| Гидросистема механизированной распорно-шагающей крепи | 1974 |
|
SU615230A1 |
| Секция механизированной крепи | 1981 |
|
SU972133A1 |
| Система управления секциями крепи угледобывающего агрегата | 1986 |
|
SU1320444A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СЕКЦИЕЙ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1990 |
|
RU2018686C1 |
| Секция механизированной шахтной крепи | 1981 |
|
SU945468A1 |
| Гидравлическая схема управления комплектной крепью | 1972 |
|
SU659760A1 |
Изобретение относится к горному оборудованию, а именно к управлению крепями сопряжений для крепления очистных забоев и сопряжений в угольных шахтах. Цель - расширение возможностей диагностирования контакта балки крепи сопряжения с кровлей при ее управлении путем контроля наличия контакта распираемой балки с кровлей. Гидравлическая схема крепи сопряжения включает секции, состоящие из параллельных рам с гидростойками (ГС) 2, 3 и рам с ГС 5, 6, объединенные домкратом передвижения. Поршневые полости ГС 2, 3 и 5, 6 и их штоковые полости подключены к напорной и сливной магистралям через блоки управления и датчики контроля распора, выполненные в виде регулируемых обратных клапанов. Домкрат передвижения подключен к напорной и сливной магистралям через блок управления. При этом все ГС имеют дополнительные датчики контроля распора, выполненные в виде дополнительного одностороннего гидрозамками 15. Надклапанная полость последнего соединена через дополнительный обратный клапан 16 со штоковой полостью ГС, а подклапанная полость - с поршневой полостью ГС. Плунжер 17 гидрозамка 15 взаимодействует с упором 18, закрепленным подвижно относительно штока ГС. Блоки управления осуществляют управление распором секций и разгрузкой секций. 2 ил.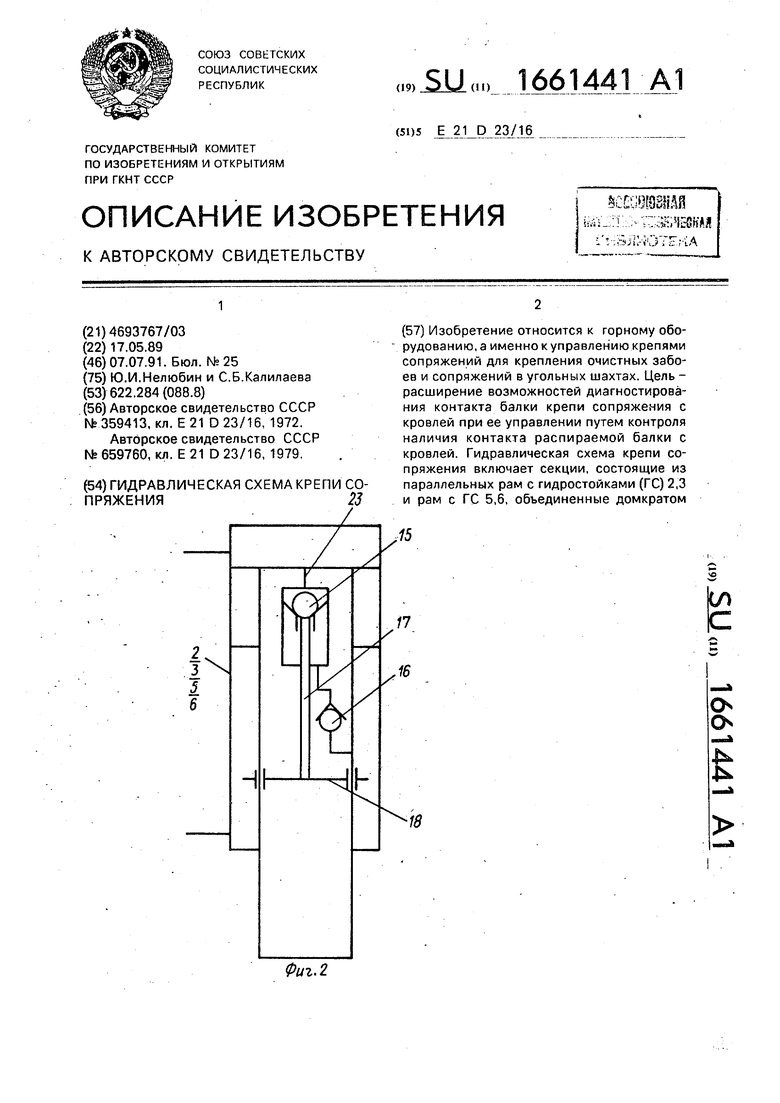
Изобретение относится к управлению крепями сопряжений для крепления очистных забоев и сопряжений в угольных шахтах.
Целью изобретения является расширение функциональных возможностей диаг- ностирования контакта балки крепи сопряжения с кровлей при ее управлении.
На фиг. 1 представлена гидравлическая схема; на фиг. 2 - гидростойка с датчиком контроля.
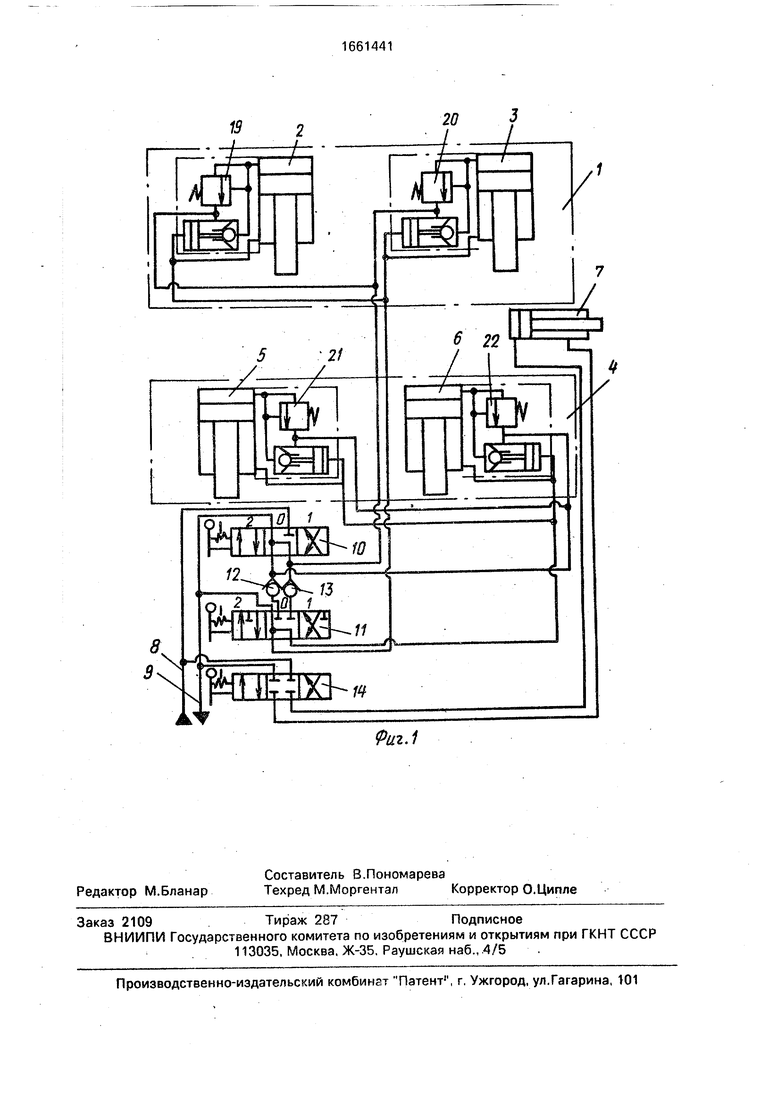
Гидравлическая схема крепи состоит из секций, включающих каждая две параллельные рамы 1 с гидростойками 2 и 3 и рамы 4 с шдростойками 5 и 6, объединенные между собой домкратом 7 передвижки.
Гидростойки рам 1 и 4 подключены своими поршневыми и штоковыми полостями к напорной 8 и сливной 9 магистралям через блоки 10 и 11 управления и датчики 12 и 13 контроля распора, выполненные в виде регулируемых обратных клапанов. Домкрат 7 передвижки также подключен к напорной 8 и сливной 9 магистралям через блок 14 управления. Все гидростойки снабжены дополнительными датчиками контроля распора, выполненными в виде дополнительного одностороннего гидрозамка 15, надклапанная полость которого соединена через дополнительный обратный клапан 16 со штоковой полостью гидростойки, а под- клапанная полость-с поршневой полостью гидростойки. Плунжер 17 одностороннего гидрозамка 15 взаимодействует с упором 18, подвижным относительно штока гидростойки, Блок 10 управления управляет распором секций и соединен с поршневыми полостями гидростоек обеих рам, блок 11 управления управляет разгрузкой секции м соединен со штоковыми полостями гидростоек обеих рам.
Блок 14 управления управляет передвижкой и соединен с поршневой и штоковой полостями домкрата 7 передвижки.
Напор к блокам 10 и 14 управления подводится от напорной магистрали 8, а к блоку
11 управления через блок 10 управления в его рабочих положениях 1 и 2 и через соответствующие датчики 12 и 13 контроля распора.
Датчики 12 и 13 контроля распора отрегулированы на давление, меньшее рабочего давления в гидросистеме, но достаточное для распора рамы, обеспечивающее ее устойчивость против опрокидывания при разгрузке соседней рамы. В нейтральном положении блоков 10 и 11 управления поршневые и штоковые полости гидростоек обеих рам соединены со сливом 9.
Гидростойки заперты гидрозамками
19-22. Обе полости домкрата передвижки заперты поясками блока 14 управления.
Гидравлическая схема крепи сопряжения работает следующим образом.
В исходном состоянии рама 1 расперта,
рама 4 разгружена, датчики 12 и 13 контроля распора отрегулированы на давление, меньшее рабочего давления в гидросистеме, но достаточное для распора рам, обеспечивающее надежное поддержание
кровли на сопряжении. Распор рамы 4.
Блок 10 управления ставится в положение 1. Напор поступает в поршневые полости гидростоек 5 и 6 рамы 4 и в
подклапанную полость каждого одностороннего гидрозамка 15 по каналу 23, Плунжер 17 одностороннего гидрозамка 15 под действием напора выдвигается до касания с упором 18, подвижным относительно штока,
и разделяет поршневую и штоковую полости гидростойки. Движение упора 18 вдоль штока ограничено размерами паза, в котором он установлен. Рама 4 распирается, Разгрузка рамы 1.
Блоки 10 и 11 управления ставятся в положение 1. При этом напор поступает сначала в поршневые полости гидростоек 5 и 6 рамы 4. Если рама 4 расперта, открывается обратный клапан 12 и напор поступает в штоковые полости гидростоек 2 и 3 рамы 1.
При этом обратный клапан 16 препятствует подаче напора в надклапанную полость одностороннего гидрозамкэ 15, т.е. не позволяет соединить штоковую полость гидростоек 2 и 3 с поршневой. Рама опуска- ется. Если рама 4 при этом не расперта, т.е. в поршневых полостях ее гидростоек 5 и 6 не было давления, то обратный клапан 12 не откроется до тех пор, пока рама 4 не расперта давлением, равным давлению открытия клапана 12. Если рама 4 расперта, гидростойки 5 и 6 выбрали максимальную раз- движность, но контакт балки крепи сопряжения не обеспечивается, то в каждой гидростойке 5 и 6 грундбукса воздействует на упор 18, который передает усилие на плунжер 17 одностороннего гидрозамка 15. Плунжер, задвигаясь, соединяет через обратный клапан 16 поршневую полость гидростойки со штоковой и обеспечивает при этом сброс давления из поршневой полости. Таким образом, давление в поршневой полости гидростойки становится ниже давления открытия клапана 12, поэтому рама 1 не разгружается.
Для обеспечения необходимого давления в поршневой полости, а следовател ьно, разгрузки рамы 1 необходимо выполнить мероприятия для изменения конструктивной высоты гидростоек крепи сопряжения.
Таким образом, автоматически исключается одновременная разгрузка обеих рам.
Передвижка разгруженной рамы 1 осу- ществляется блоком 14 управления и распор ее после передвижки - блоком 10 управления. Рукоятка блока 10 управления ставится в положение 2. При этом напор поступает в поршневые полости гидросто- ек 2 и 3 рамы 1. Блок 11 управления остается в положении О, обеспечивая слив из што- ковых полостей гидростоек. Рама 1 распирается.
Разгрузка рамы 4.
Для разгрузки рамы 4 обе рукоятки блоков 10 и 11 управления ставятся в положение 2. Операции по разгрузке, передвижке и распору рамы 4 аналогичны раме 1.
Предлагаемая гидравлическая схема позволяет диагностировать контакт балки крепи сопряжения с кровлей, .т.е. при его отсутствии датчики контроля, установленные в штоке гидростойки, не позволяют срабатывать датчикам контроля распора и разгрузка второй рамы невозможна.
Формула изобретения
Гидравлическая схема крепи сопряжения, включающая связанные двумя рамами гидростойки, поршневые полости которых соединены с выходами распорных блоков управления, подключенных к напорной и сливной магистралям, а штоковые - с выходами разгрузочного блока управления, подключенного к сливной магистрали и через датчики контроля, выполненные в виде обратных клапанов, к выходам распорных блоков управления, отличающаяся тем, что, с целью расширения возможностей диагностирования контакта балки крепи сопряжения с кровлей при ее управлении путем контроля наличия контакта распираемой балки с кровлей, каждая гидростойка крепи сопряжения снабжена установленным в штоковой полости упором и дополни- тельным датчиком контроля распора, который выполнен в виде дополнительного одностороннего гидрозамка, надклапанная полость которого соединена посредством дополнительного обратного клапана со штоковой полостью гидростойки, а подкла- панная полость соединена с поршневой полостью гидростойки, при этом плунжер дополнительного одностороннего гидрозамка установлен с возможностью взаимодействия с упором, закрепленным подвижно относительно штока гидростойки.
192
II
J.-I
/
/
Риг.1
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КРЕПЬЮ | 0 |
|
SU359413A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Гидравлическая схема управления комплектной крепью | 1972 |
|
SU659760A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
