гидростойки 4, многокомпозиционный 17 и двухкомпозиционные трехлинейные распределители (Р) 13-16, установленные по три на каждой секции, и пульт дистанционного управления. Последний соединен с каждой группой секций магистралями: напорной, сливной, распора гидростоек, передвижки базы, разгрузки и передвижки секций. При этом Р 13, 14 и 16 соединены каналом (К) 25 с напорной магистралью, Р 13 и 14 соединены соответственно К 24 и 26 со штоковыми полостями ГЦ 3 и 2. Р 15 соединен К 27-29 соответственно с поршневой полостью ГЦ 2, с Р 16 и сливной магистралью, а Р 16 соединен
1
Изобретение относится к горной промыпшенности и предназначено для дистанционного и индивидуального управления секциями крепи угледобываю- щих агрегатов. .
Целью изобретения является повышение надежности работы системы гидравлического управления секциями крепи угледобывающего агрегата.
На фиг.1 представлена принципиаль- ная гидравлическая схема управления крепью агрегата; на фиг.2 - принципиальная гидравлическая схема системы управления одной секцией крепи (гидравлическая схема части известной крепи ОКП 70 показана условно).
Система содержит базу 1 с конвейерным ставом, фронтально передвигаемую гидроцилиндрами 2 и 3, гидростойки 4, образующие три группы секций 5 (5.1; 5.2 и 5.3), пульт 6 дистанционного управления, установленный на штреке 7 и соединенный с каждой группой секций 5 напорной 8 и сливной 9 магистралями, магистралью 10 распора гидростоек, магистралью 11, передвижки базы 1, Магистралью 12 разгрузки и передвижки секций (12.1 - первой группы секций, 12.2 - второй группы, 12.3 - третьей группы), двухпозиционные трехлинейные распределители 13-16 с камерами гидроуправления и пружинным возвратом, систему индивидуального гидроуправления секцией с многопозиционным распределителем 17, под-
К 30 с Р 17, Поршневая полость гидростойки 4 соединена с магистралью распора через обратный клапан 31. Все сливные линии объединены в К 33, соединенный со сливной магистралью. Камера управления Р 16 соединена К 25 с магистралью передв1шки базы. Камеры управления Р 13-15 соединены К 36 с магистралью разгрузки и передвижки секций. При работе систе (Ь первая группа секций находится в-передвижке. Вторая и третья группы секп,ий расперты. Затем аналогично загружаются и подтягивсцотся вторая и третья группы секций с повторением последовательности разгрузки и передвижки. 2 ил
5
1,
5
5
порным клапаном 18, клапаном ИЛИ 19, гидрозамком 20. На штреке 7 установлен мультипликатор 21, выполненный в виде гнцроцилиндра, штоковая полость которого соединена с магистралью 10 распора гидростоек, а бесшто- ковая полость соединена через дополнительный распределитель 22 и отсека- тель 23 с напорной магистралью 8, Распределитель 13 соединен каналом 24 со штоковой полостью гидроцилиндра 3 перемещения, каналом 25 - с напорной магистралью 8. Распределитель 14 соединен каналом 26 со штоковой полостью гидроцилиндра 2 перемещения и ка налом 25 с напорной магистралью 8. Распределитель 15 соединен каналом 27 с поршневой полостью гидроцилиндра 2, каналом 28 - с распределителем 16 а каналом 29 - со сливом. Распределитель 16 соединен каналом 25 с напорной магистралью 8 и каналом 30 с распределителем 17. Дополнительный обратный клапан 31 соединен каналом 32 с поршневой полостью гидростойки 4 и каналом 33 с магистралью 10 распора. Все сливные .пинии объединены в канал 34, который соединен с магис ралью 9. Камера упргл- ения распределителя 16 соединена i англом 35 с магистралью 11. Камеры упр&вления распределителей 13, 14 и 5 соединены каналом 36 с магистралью 12.
Система работает след лощим образом.
1
В исходном положении одна из трех секций крепи, например первая, находится в передвижке, т.е. разгружается и подтягивается к базе 1 агрегата, а остальные две группы секций расперты. Затем разгружается и подтягивается вторая группа секций 5.2, остальные две группы расперты. Затем разгружается и подтягивается третья группа секций 5.3 крепи. По.сле распора всех трех групп секций база 1 передвигается на забой. В дальнейшем последовательность разгрузки и передвижки повторяется.
Дистанционная передвижка каждой группы секций осуществляется следующим образом.
Напорная магистраль 8 за время передвижки всегда находится под давлением рабочей среды. Для передвижки группы секций с активным подпором, например первой 5.1, через пульт управления 6 подается давление управления через магистраль 12.1, канал 36 в камеры управления распределителей 13, 14 и 15, которые переключаются в положение II. При этом рабочая среда из напорной магистрали 8 через канал 25, канал распределителя 14,
канал 26 поступает в штоковую полость гидроцилиндра 2 перемещения, при этом рабочая среда из поршневой полости через канал 27, канал распределителя 15, канал 29, канал 34 поступает в сливную магистраль 9. Одновременно рабочая среда из напорной магистрали 8 через канал 25, распределитель 13, канал 24 поступает в штоковую полость гидроцилиндра 3 перемещения, через клапан ИЛИ 19 в штоковую полость гидростойки 4, в камеру управления подпорного клапана 18, переключая его в положение II, ив камеру управления гидрозамка 20, открывая последний. После открытия гидpoзakкa 20 давление в поршневой полости гидростойки 4 понижается до давления настройки подпорного клапана 18.
Таким образом, при передвижке секции гидростойка 4 развивает усилие, зависящее от давления настройки подпорного клапана 18 и передвижки секции 5 крепи. Причем усилие гидростойки 4 уменьшается при увеличении усилия передвижки (в штоковых полостях гидроцилиндров 2 и 3) и увеличивается при его уменьшении, тем самым автоматически обеспечивая стабилизацию уси
Q g
5 Q
0
5
0
5
035
ЛИЙ передвижки и подпора секций. В процессе передвижки подпор предотвращает потери контакта козырька с кровлей. После передв -1жки всех секций первой группы с пульта 6 управления магистраль 12.1 соединяется со сливом. При этом под действием пружин распределители 13, 14 и 15 переключаются в положение I (в исходное положение) . Гидрозамок 20 закрывается, а подпорный клапан 18 переключается в положение I. После чего с помощью отсекателя 23 давление подается в магистраль 10 распора гидростоек. Рабо- чая среда под давлением из магистрали 10 по каналу 33, через дополнительный обратньй клапан 31 и канал 32 поступает в поршнев то полость гидростойки 4, распирая последнюю. Штоковая полость гидростойки 4 при этом через клапан ИЛИ 19, канал 24, распределители 13 и 17 соединена со сливом. После распора всех стоек магистраль 10 отсекается от давления рабочей среды с помощью отсекателя 23.
Для передвижки третьей группы с.ек- ций 5.3 рабочая среда под давлением через пульт 6 управления подается в магистраль 12.3. Разгрузка и передвижка третьей группы секций аналогичны предыдущим. После передвижки третьей группы секций магистраль 12.3 соединяется со сливов. Затем производится распор всех секций крепи путем подачи рабочей среды под давлением в магистраль 10 с помощью отсекателя 23.
После распора гидростоек 4 рабочим давлением среды, при необходимости, крепь распирают повышенным давлением (до 40 МПа). Для этого рабочая среда под давлением через распределитель 22 подводится в поршневую полость мультипликатора 21. За счет разницы площадей из штоковой полости последнего в магистраль 10 поступает повьшенное давление, за счет чего обеспечивается надежный распор крепи.
Для передвижки базы (конвейерного става) на забой рабочая среда под давлением подается через пульт 6 управления в магистраль 11. Из последней рабочая среда под давлением по каналу 35 поступает в камеру управления распределителя 16, переключая его в положение II. При этом раб.очая среда под давлением из напорной магистрали 8 через канал 25, распредели5
тель I6j канал 28,, распределитель 15 канал 27 поступает в поршневую полость гидроципиядра 2 перемещения,, перемещая базу 1 на забой. При этом штоковые 1ЮЛОСТИ гидроцилиндров 2 и 3 через распределители 13, 14 и Г/ соединены со сливом. После окончания передвюкки базы магистраль 11 соединяется со сливом через пульт 6 управления. Под. действием пружины распределитель 16 возвращается в исходное положение (положение I),
Для перехода на ручное (индивидуальное) управление секциями никаких переключений делать не нужно, так как схема находится в режиме ручного и дистанционного управления. Индивидуальное управление, секциями осуществляется с ПОМСЧиТ-Ю МНОГЭПОЗИЦИОННОГО
распределителя 1 7 с. ручным управлением. HanptE-iep, /цтм - ылвижки секп.им с aKTnBHb iiv; по;.1поро ; :1еобходимо установить рукоятки .аеректпочеипя клапана ИЛИ 1 9 Р.е.рг1е;1лякулярно к оси корпуса многопозлггионпо; о раСпрбделитеЛЯ 17 в положение in-JV,, отсекателгя в положсгпзо 1. В результате поток жидкости ПОЙ..ЦУТ з ;пто.:овые полости Г51д- роп.илиндров 2 I; 3 г;еремещеиия, Одновременно с У ; - ;то, П 1Ориый клапан гид- розаикг 20 ом ;-:: -:1К1атся, и давление в
ПОР115НС1 ОЙ ПО, :ОП-Г ;-И;фОСТО1 КИ 4 ПО
ниЯ :аетс;; до ;ianJ e t- H настройки подпорного iuiaFia;i;i |У. Таким образом, при выдвижке сехцтгп гидростойка 4 развивает усилие, зависящее от давления настройки подпорного клапана 18 и передвижки крепи.
По окончании выдвижки отсекатель закрывается, рукоятку распределителя 17 устанавливают в положение VI, открывается отсекате.пь, распирается гидростойка 4, закрывается отсекатель и рукоятка управ; ения распределителя 17 устанавливается Р положение 0.
Формул а и 3 о б р е т е н и я
Система гидравлического управления секциями крепи угледобывающего
32035
агрегата, со11кг - .. 1 идроц1 л;- ндрь перемещения , С1 я-ii-uirii Minie фг 01ггаль ;ую базу с тремя г руппам:- секций, г щтростойкп, много по: 1и.рлог-:пый р;к;::редели- Ь
тель и двухполнн.иони ;; -- трехл -тнейнг.115
распределитель с камерой ) идроуправ- ления и пр жиниь-т.-; нозирятом, установленные н;ч ка рдоГ| :, пульт дне10 танционного управления, по.,к:1юченный к напорной и СЛИВНО11 магисч рао ям, магистрали рас пора гилростоек, i- агист- рали передЕл-с-хк; баз1,1 и .-.агистрали передвижки каждс й гругспы секгдта, о т -
15 л и ч а ю DI а я с я тем, что,, с целью повьпиенмя 1к-,д:,сжности работы системы гидра-.в. ког о управления сех- пиями крепи у1 ле:ДО 1Ь1заюп его агрегата, она дополните.:: ьь:о снабжена апрлогич2Q ными двухпозиги гипи 1ми трехпян.ей}1ыми распре ;елит-улямп, ус/; анов.Г енньгт-н по три на каждой сг-кщ-ги ; : обрат 1Ь1ми клапанами, njj.n -jTor-i дил двухпозицггонньгх трех1;инейнь1х рсг::Г1редяли- сля выходами
2Б соединены а- ih-jЧ Т- С Пммм полостями Г1;д- роцилпидро; пе-к ;ис1-;елип . сдпимп из входов - с luiiiOi/Hoii r.iarucTp,., а другими вхо.;тГ1м;1 - с выходами много- позпциопного riviciipc:л.йлителя, iретий
30 -1вухпо:п1ционм1;(й тмсх икнуйный распре чи;; икс-и с поршневой П .:.;-)а :ерй:- е:цси1-1Я ,
- ;Ч; СЛИВНОЙ МЛГИСТ
С fibixnnobr L STBep- ,1го ре ;ли;1ей: ого оторь;й входом соединен с нат;орной магистралью, а другим входном - С о.дним из выходов многопозип.()Г 11 р.- с. пре делителя, причем камера гидро правления первьш трех двухГ Озпцк:оннь : трех.чинейных распределите:;ей соединена с магистралью передвижки группы секций, а камера гидроуправтпгнип -етвертого двух- позиционного трехл П- ейпого распределителя соедипена с магпст1)алью передвижки базы, а гс,ршпс-вая полость гидростойки каж;.т,ой coKui-in соед.итшна с магистралью pacricipa гплрос-: оек через обратный кля.гган .
35
делитель выходог;
ГИДрО}( ;. ОДП1 из 3.1Х;-ДО;
ралЬ О. а друг И . - того двухпозпи, расп едел;- ели, :
40
45
11,
V
Vi
36
1f
S,1 5.2
//гз
/ 5.1
5,2
/
5.3
S.1
Редактор Л.Лангазо
Составитель В.Пономарева
Техред и.ХоданичКорректор в. Бутяга
Заказ 3781/30Тираж 454Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
.в
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная А
fPu2.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления секциями крепи угледобывающего агрегата | 1986 |
|
SU1320444A1 |
| Двухканальная система управления механизированной крепью | 1989 |
|
SU1710771A1 |
| Гидросистема механизированной крепи для пластов наклонного падения | 1989 |
|
SU1681015A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СЕКЦИЕЙ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1990 |
|
RU2018686C1 |
| ГИДРОСИСТЕМА СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1999 |
|
RU2161254C1 |
| Гидросистема механизированной крепи | 1985 |
|
SU1270360A1 |
| Устройство обеспечения подпора | 1975 |
|
SU746121A1 |
| Устройство для подпитки гидростойки механизированной крепи | 1988 |
|
SU1610040A1 |
| Блок управления секцией механизированной крепи | 1989 |
|
SU1687793A1 |
| Механизированная крепь | 1981 |
|
SU964177A1 |

Изобретение относится к горной промышленности и предназначено для дистанционного и индивидуального управления секциями крепи угледобывающих агрегатов. Цель изобретения - повышение надежности работы системы гидравлического управления. Она включает фронтально передвигающие базу с конвейерным ставом гидроцилиндры (ГЦ) 2 и 3, образующие три группы секций сл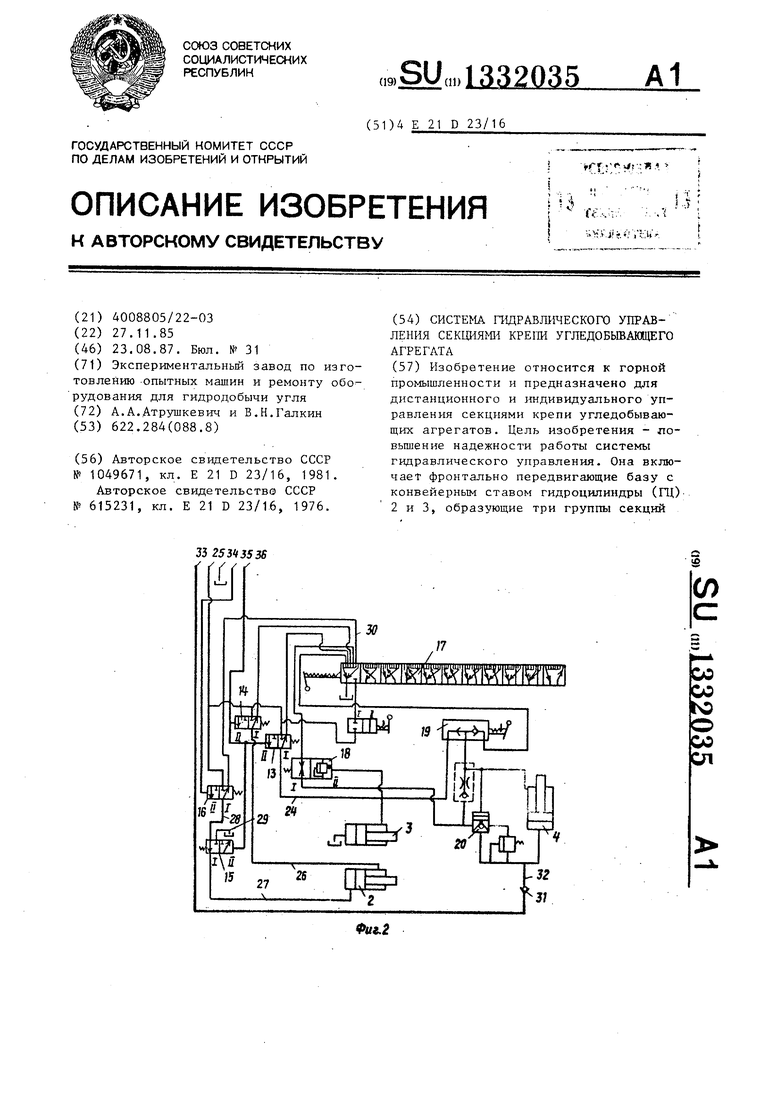
| Гидросистема механизированной крепи | 1981 |
|
SU1049671A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Система гидравлического управления секцией крепи угледобывающего агрегата | 1976 |
|
SU615231A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
