./
о
0
ю о
00
Изобретение относится к вычислительной технике и технике связи и может быть использовано в устройствах цифровой обработки случайных процессов с импульс- но-кодовой модуляцией (ИКМ) и дельта-модуляцией (ДМ).
Цель изобретения - повышение удобства эксплуатации за счет упрощения пере- стройки на другую передаточную характеристику.
На чертеже приведена функциональная схема фильтра.
Цифровой фильтр с многоуровневой ДМ (МДМ) содержит первый и второй блоки 1 и 2 задержки, первый и второй блоки 3 и 4 коммутации, первый - седьмой комбинационные сумматоры 5 - 11 и накапливающий сумматор 12. На чертеже обозначены информационные входы 13, тактовый вход 14, вход 15 обнуления, первые и вторые управляющие входы 16 и 17, выходы 18.
Блоки 1 и 2 задержки представляют собой многоразрядные регистры сдвига
В основе работы цифрового фильтра с многоуровневой дельта-модуляцией лежит следующее. Выходной сигнал цифрового фильтра, входной сигнал { хк}, К 0 которого представлен в формате ИКМ, а весовая последовательность в формате МДМ, выражается в виде
М-1
2, 2 х - m siri ) ,
- 1 m 0
0)
-л
где { Smv },п О.М-1 - шаги квантования импульсной характеристики фильтра; М - ее длина.
Организуем вычисление (1) в два этапа, каждый из которых реализуется при помб- щи суммирования с накоплением
Уп ЈVyi. Vy Xi-mSfr), (2)
I 1
Введем вспомогательную последовательность {im , m 0,L-1, элементы которой представлены в виде 1(-1)ч1( 1К,
Vqk, lkЈ{ 0,1} , k ГЛЛ; ,10- 1.
Последовательность первых разностей {Vyi} запишем в виде
L-1
M +L-2
- M Т L - i/-u
2lkVyi-k Ix,-m RU1),
0
где
(-DqkikSmh)-k;s(h)0
для k 0 и k M.
Выделяя из (З) значение первой разности Vyi, выходной сигнал цифрового фильтра с ТО МДМ (1) представим в виде
Уп
Ј (MЈLxi2-mRmh}-L2lmVy|-m).
- 1 m 0
5
0
5
5
(4)
Преимущества метода вычислений выходного сигнала фильтра по (4) заключаются в том, что при соответствующем выборе вспомогательной последовательности { Im} и ее длины L имеется возможность резкого снижения разрядности преобразованной весовой последовательности {Rm(h)},, MM L-2 до значений Ri(h) {-2,2} (т.е. в формате МДМ). Это позволяет полностью исключить операции умножения при вычислении выходного сигнала фильтра и заменить их алгебраическим суммированием соответствующих отсчетов входного сигнала (умножение на число 2 соответствует сдвигу двоичного представления отсчета на единицу в сторону старших разрядов).
Обозначим через сг число групп одинаковых ненулевых значений коэффициентов преобразованной импульсной характеристики, в нашем случае crRM, a аналогичное число для последовательности {1т}-Ь(|)2.таккак 1тб{-1,0,1}.
Проведем группирование шагов квантования входного сигнала и первой разности по одинаковым значениям коэффициентов, и обозначим число коэффициентов в каждой
d(R)
группе для {Rm(h)} через Kj(R), Nm Ј Kj(R),
1 1
а для {Im} через К(| Lm 2) к/) гДе Nm,
j-1
Lm - число ненулевых членов в последовательностях {Rm}, m О, М+ L-2 и {Im}, m 1, L-1 соответственно. Тогда первую разность в (4) запишем в виде
d(R кР Vy I R/ 2) x..r
$ i i°
- 2 i/ 2 vy,.r
j 1 r l
(5)
Здесь {Rj1}, , d(R) и (Ij), , d(l) - последовательности различных ненулевых значений из последовательностей {Rm} и {lm} соответственно {Rj} {-2,-1.1.2}, {Ij} {- 1,1}, которые с увеличением длины весовой последовательности остаются неизменными.
Одновременно с резким уменьшением разрядности преобразованной весовой последовательности соответствующий выбор последовательности {lm} позволяет уменьшить число Mm ненулевых членов в { Rm }, что приводит к уменьшению числа слагаемых в (5).
Таким образом, полное исключение умножений при вычислении выходного сигнала цифрового фильтра с МДМ и замена их незначительным числом сумматоров (d R + сг1 6) позволяет реализовать быстродействующий цифровой фильтр (время суммирований существенно меньше времени выполнения операции умножения, Отметим, что один и тот же набор значений весовых коэффициентов {Rm } и {lm} позволяет реализовать различные типы фильтров - нижних частот, верхних, полосовые и т.д.
Фильтр работает следующим образом.
Перед началом работы цифрового фильтра с МДМ необходимо провести настройку его на заданную передаточную характеристику. Для этого на управляющие входы 16 и 17 подаются управляющие сигналы, в результате чего устанавливаются связи (ji)x выходов блока 1 задержки с одной из групп входов сумматоров 5-8 и связи (J2)-x выходов блока 2 задержки с одной из групп входов сумматоров 9 или 10. Связи блоков 1 и 2 с сумматорами 5 и 10 устанавливаются так, чтобы все отсчеты входного сигнала {х|,г} и первой разности {Vyi.r}, умножаемые согласно формуле цифровой свертки (5) на одинаковое значение коэффициентов RJ и 1|с.прступали на входы сумматорор 5-8 ,4) и 9-10 (,2) соответственно.
Затем необходимо провести обнуление фильтра путем подачи установочного импульса на вход 15 обнуления. В результате воздействия этого импульса на входы обнуления блоков 1 и 2 и накапливающего сумматора 12 на выходах 18 фильтра и всех выходах блоков 1 и 2 устанавливаются нулевые значения сигналов. Такое обнуление необходимо также проводить при случайных сбоях, чтобы предотвратить накопление ошибок в выходном сигнале фильтра. Кроме того, обнуление является принципиально важным для обеспечения устойчивой работы фильтра, так как все полюсы этого фильтра лежат на единичной окружности и
только обнуление всех блоков задержки, и сумматоров в начале каждого цикла работы принципиально предотвращает возникновение колебаний предельного цикла в та- 5 ких структурах.
На информационные входы 13 фильтра поступает последовательность отсчетов входного сигнала {хп}, , которая по тактовым импульсам с входа 14 записывается и
0 последовательно сдвигается в блоке 1 задержки. Частота следования тактовых импульсов на входе 14 соответствует частоте дискретизации входного сигнала Т в формате ИКМ.
5 0тсчеты входного сигнала {хп.г}, ,k/ , умножаемые согласно формуле цифровой свертки (5) на одно и то же значение весового коэффициента преобразованной весовой последовательности RJ,
0 поступают на входы соответствующего сумматора 5-8 через предварительно установленные при настройке фильтра связи блока 3 коммутации; отсчеты входного сигнала, умножаемые на значение коэффициента
5 , поступают на входы сумматора 5; отсчеты, умножаемые на значение коэффициента , поступают на входы сумматора 6; отсчеты, умножаемые на значение коэффициента Rj 1, поступают на входы суммато0 ра 7 и отсчеты, умножаемые на значение коэффициента , - на входы сумматора 8. На входах сумматоров 5-8 формируются суммы указанных отсчетов входного сигнала, которые одновременно на их выходах
5 преобразуются (при необходимости) в свое дополнение для выполнения операции вычитания - на выходах сумматоров 5 и 6. В результате этого на выходах сумматоров 5- 8 формируются частичные суммы RJ X
0 4
Јхл-г- поступающие на входы седьмогосумг 1
матора 11. Умножение на число 2 учитывается при формировании частичных сумм
5 путем сдвига их двоичного представления на единицу в сторону старших разрядов.
На выходах седьмого сумматора 11 из значений сигналов на выходах первого - шестого сумматоров 5-10 формируется пе0 следовательность значений первой разности {V уп}, п 0. Это производится следующим образом. Последовательность предыдущих (до n-й) значений первой разности с выходов сумматора 11 поступает на
5 информационные входы второго блока 2 задержки, где по импульсам с входа 14 производится запись и последовательный сдвиг значений первой разности
Значения первой разности {Vyn,r}, г 1. К) умножаемые согласно формуле
цифровой свертки (5) на одно и то же значение коэффициента вспомогательной последовательности Ij1, поступают на входы соответствующего сумматора 9 или 10 через предварительно установленные при настройке фильтра связи блока 4 коммутации - значения первой разности, умножаемые назначение коэффициента Ij -1 поступают на входы сумматора 9, а значения, умножаемые на значение коэффициента Ij1 1 - на входы сумматора 10. На выходах сумматоров 9 и 10 формируются суммы указанных отсчетов входного сигнала, которые одновременно на их выходах преобразуются (при необходимости) в свое дополнение - на выходах сумматора 9, т.е. на выходах сумматоров 9 и 10 формируются частичные суммы
кР Ij1 2) Уп.г , поступающие на входы седьг 1 мого сумматора 11.
Значение текущего отсчета первой разности Vyn согласно (5) получается на выходах седьмого сумматора 11 путем алгебраического суммирования сигналов на его входах, соответствующих суммам отсчетов входного сигнала и первой разности, умноженных на соответствующие значения коэффициентов.
Текущее значение отсчета первой разности Vyn, поступает на информационные входы накапливающего сумматора 12, осуществляющего непрерывное накопление значений {V уп}, формируя выходной сигнал фильтра {уп} согласно (4), путем суммирования очередного значения Vyn с накопленным в сумматоре 12 значением при поступлении каждого тактового импульса с входа 14. Поэтому на выходах накапливающего сумматора 12 формируется последовательность отсчетов выходного сигнала цифрового фильтра {уп} в формате ИКМ, поступающая на выходы 18 фильтра.
Таким образом, в фильтре осуществляется обработка входного сигнала с ИКМ с использованием преобразованной весовой последовательности в формате МДМ, что позволяет полностью исключить операцию
умножения при вычислении выходного сигнала фильтра, обеспечив высокую разрешающую способность. Благодаря тому, что преобразованная весовая последовательность имеет предельно низкую разрядность ( I RJ 11 2, I Ij11 1) из схемы фильтра полностью исключены умножители, а перестройка на другую передаточную характеристику осуществляется простым
0 переключением блоков 3 и 4 коммутации. Формула изобретения Цифровой фильтр с многоуровневой дельта-модуляцией, содержащий первый блок задержки, информационные входы,
5 тактовый вход и вход обнуления которого являются одноименными входами фильтра, первый - четвертый комбинационные сумматоры, пятый и шестой комбинационные сумматоры, выходы которых соединены с
0 соответствующими входами седьмого комбинационного сумматора, отличающийся тем, что, с целью повышения удобства эксплуатации за счет упрощения перестройки на другую передаточную характеристику, в
5 фильтр введены второй блок задержки, первый и второй блоки коммутации и накапливающий сумматор, тактовый вход и вход обнуления которого объединены с одноименными входами второго блока задержки и под0 ключены к одноименным входам фильтра, выходы первого и второго блоков задержки подключены к соответствующим информационным входам одноименных блоков коммутации, управляющие входы которых являются
5 соответственно первыми и вторыми управляющими входами фильтра, выходы первой - четвертой групп первого блока коммутации и выходы первой и второй групп второго блока коммутации соединены с входами соответст0 венно первого - шестого комбинационных сумматоров, выходы первого - четвертого комбинационных сумматоров подключены к соответствующим входам седьмого комбинационного сумматора, выходы которого соеди5 нены с информационными входами второго блока задержки и накапливающего сумматора, выходы которого являются выходами фильтра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой фильтр с многоуровневой дельта-модуляцией | 1989 |
|
SU1661969A1 |
| Цифровой рекурсивный фильтр | 1990 |
|
SU1803962A1 |
| Цифровой фильтр с многоуровневой дельта-модуляцией | 1988 |
|
SU1683172A1 |
| Цифровой рекурсивный фильтр | 1990 |
|
SU1798891A1 |
| Цифровой фильтр с многоуровневой дельта-модуляцией | 1988 |
|
SU1587624A1 |
| Цифровой фильтр с многоуровневой дельта-модуляцией | 1987 |
|
SU1494210A1 |
| Цифровой фильтр с линейной дельта-модуляцией | 1987 |
|
SU1481893A1 |
| Анализатор активности непрерывных сигналов | 1989 |
|
SU1658386A1 |
| Цифровой фильтр с многоуровневой дельта-модуляцией | 1990 |
|
SU1716607A1 |
| Дельта-модулятор | 1987 |
|
SU1425838A1 |
Изобретение относится к вычислительной технике и технике связи. Его использование в устройствах цифровой обработки случайных процессов с импульсно-кодовой или дельта-модуляцией позволяет повысить удобство эксплуатации за счет упрощения перестройки на другую передаточную характеристику (ПХ). Цифровой фильтр содержит блок 1 задержки и комбинационные сумматоры 5 - 11. Благодаря введению блока 2 задержки, блоков 3, 4 коммутации и накапливающего сумматора 12 коэффициенты ПХ вводятся в формате многоуровневой дельта-модуляции с малой размерностью, что позволяет отказаться от перемножителей. 1 ил.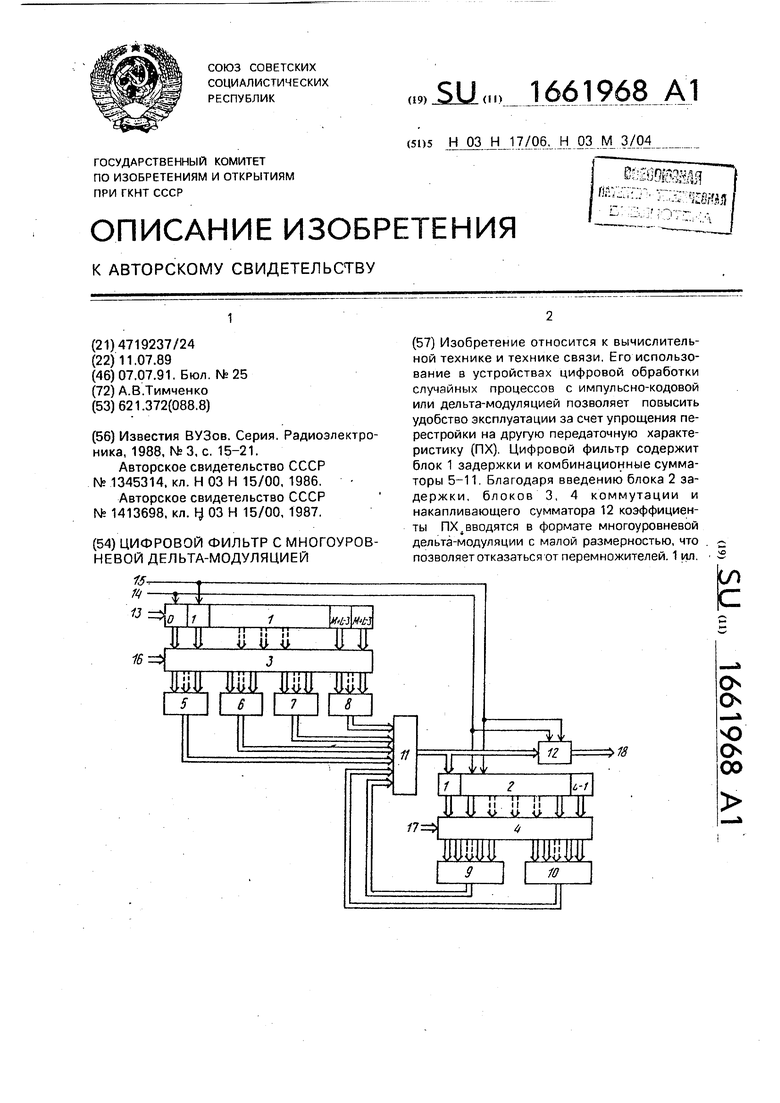
| Известия ВУЗов | |||
| Серия | |||
| Радиоэлектроника, 1988, №3, с | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Цифровой трансверсальный фильтр | 1986 |
|
SU1345314A2 |
| кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Цифровой трансверсальный фильтр | 1987 |
|
SU1413698A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
