Изобретение относится к сейсмической разведке и предназначено для преобразования вибросейсмических данных в импульсную форму путем корреляции их с опорным сигналом вибратора в реальном времени.
Цель изобретения - увеличение динамического диапазона коррелограммы путем снижения корреляционных шумов, а также сокращение объема блока памяти.
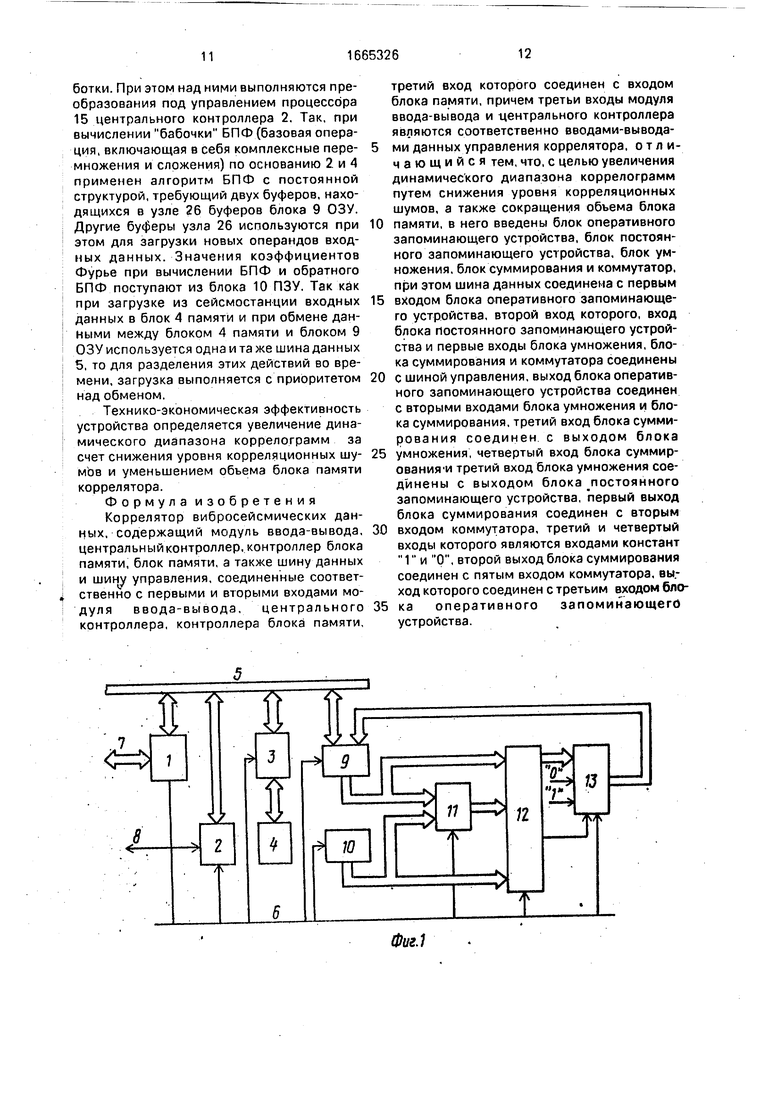
На фиг.1 приведена функциональная схема коррелятора вибросейсмических данных; на фиг.2-6 - функциональные схемы отдельных блоков устройства - центрального контроллера, блока памяти, блока оперативного запоминающего устройства (ОЗУ),
блока умножения и блока суммирования соответственно.
Коррелятор вибросейсмических данных содержит модуль 1 ввода-вывода, центральный контроллер 2, контроллер 3 блока памяти, блока 4 памяти, шину данных 5, шину управления 6, вводы-выводы данных 7 и управления 8, блок 9 ОЗУ, блок 10 постоянного запоминающего устройства (ПЗУ), блок 11 умножения, блок 12 суммирования и коммутатор 13. Шины данных 5 и управления о соединены соответственно с первыми и вторыми входами модуля 1 ввода-вывода, центрального контроллера 2, контроллера блока памяти 3. Причем третьи входы модуля 1 ввода-вывода и центрального контроллера 2 являются соответственно
О
о ел
/
ю о
вводами-выводами данных 7 и управления 8 коррелятора и соединены с интерфейсной шиной пибросейсмической станции (на фиг. не показана). Шина данных 5 соединена с первым входом блока 9 ОЗУ, второй вход которого, вход блока 10 ПЗУ и первые входы блока умножения 11, блока суммирования 12 и коммутатора 13 соединены с шиной 6 управления. Выход блока 9 ОЗУ соединен с вторыми входами блока умножения 11 и. блока суммирования 12, третий вход блока суммирования 12 соединен с выходом блока умножения 11. Четвертый вход блока суммирования 12 и третий вход блока умножения 11 соединены с выходом блока 10 ПЗУ, первый выход блока суммирования 12 соединен с вторым входом коммутатора 13, третий и четвертый входы которого являются входами констант 1 и О. Второй выход блока суммирования 12 соединен с пятым входом коммутатора 13, выход которого соединен с третьим входом блока 9 ОЗУ.
Модуль 1 ввода-вывода служит для передачи данных с вибросейсмостанции на коррелятор и обратно. Передаваемые дан- ные проверяются на четность, о сбоях сообщается центральному контроллеру 2. Для синхронизации темпов приема данных и их обработки в составе модуля 1 ввода-вывода имеются промежуточные буферы. Управле- ние модулем 1 ввода-вывода осуществляется центральным контроллером 2 с помощью шины управления 6 через его второй вход. Скорость обмена данными со станцией 0,3 мбайт/с последовательным кодом
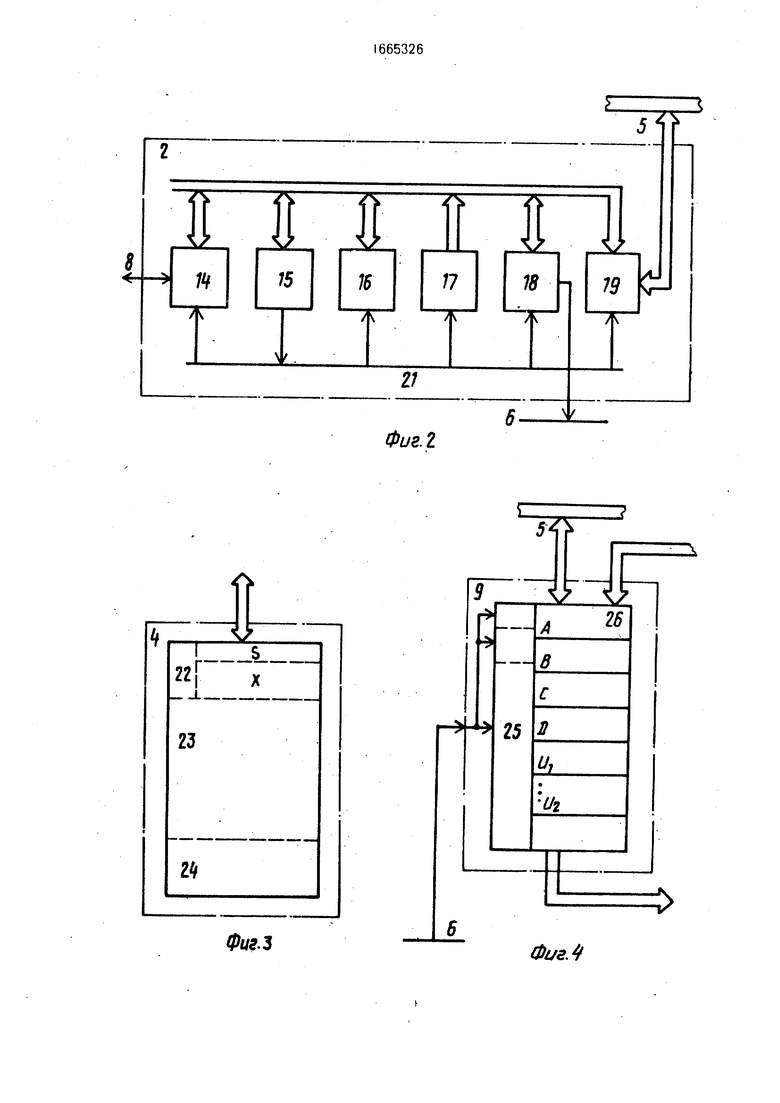
Центральный контроллер 2 (см.фиг.2) состоит из приемного регистра 14, процессора 15, ОЗУ 16, ПЗУ 17, регистров управления 18 и данных 19, а также внутренних шин данных 20 и управления 21.
Центральный контроллер 2 служит для выполнения задаваемых дистанционно с вибросейсмостанции режимов работы коррелятора, поступающих в него в виде кодов через ввод-вывод управления 8. Кроме того. он может выполнять тестовые проверки коррелятора с помощью панели управления (на фиг. не показана), сообщая о результатах проверки на пульт вибросейсмостанции. Регистр 14 принимает коды режимов со станции (и передает результаты проверок в станцию) в соответствии с сигналами ее интерфейса под управлением процессора 15. Процессор 15 дешифрирует коды и организует выполнение полученных режимов, ис- пользуя при этом ОЗУ 16. Выполнение режимов осуществляется выборкой последовательности микрокоманд, хранящихся в ПЗУ 17 и через регистр 18 поступающих в Шину управления 6 С помошью регистра
данных 19 процессор 15 передает в шину данных 5 тестовые данные и получает результаты проверок
Контроллер 3 блока памяти предназначен для выработки адресов считывания-записи и управляет переносом данных в/из блока 4 памяти. Блок памяти 4 (см.фиг.3) состоит из входного буфера 22, буфера 23 частичных сумм и выходного буфера 24 и отличается меньшим общим объемом. Входной буфер 22состоит из меньшей части для хранения отсчетов опорного сигнала (один канал) и большей части для хранения отсчетов многих сейсмических каналов. Блок памяти 4 выполнен на микросхемах динамических ЗУ большой емкости и малой потребляемой мощности. Шина данных 5 служит для обмена данными между узлами устройства. Число разрядов шины 16, тактовая частота 5 мГц Шина управления 6 имеет разрядность 60, тактовая частота 5 мГц. Входы-выходы данных 7 и управления 8 служат для связи коррелятора с вибросейсмо- станцией (на фиг. не показана).
Быстродействующий блок 9 ОЗУ (см. фиг.4) состоит из узлов адресации 25 и буферов 26. Первый вход блока 9 ОЗУ является двунаправленным вводом-выводом данных и создает блок 9 ОЗУ с шиной 5 данных. Он служит для загрузки относительно медленно поступающих из блока памяти 4 отсчетов секций данных. Третьи вход и выход блока 9 ОЗУ служат для более быстрого считывания-записи операндов, т.е. цифровых кодов отсчетов, при обработке. Узел адресации 25 через второй вход блока 9 ОЗУ соединен с шиной управления 6. Он отдельно адресует ячейки одного из загружаемых буферов узла 26 и образует общее адресное пространство для ячеек остальных буферов. Узел 26 буферов состоит из четырех буферов А, В, С, D для хранения входных данных и промежуточных результатов и буферов обобщенного оператора обработки U, состоящего из N сдвоенных секций ячеек. Блок 10 ПЗУ выполнен на микросхемах ПЗУ с зашитыми в них значениями коэффициентов Фурье для выполнения быстрого преобразования Фурье (БПФ), набором значений порога и набором отсчетов функции окна G (Т) (для вычисления функции фильтра). Их тип и конкретные значения выбираются с помощью соответствующего адреса, поступающего на вход ПЗУ из центрального контроллера 2 по многоразрядной шине 6 управления.
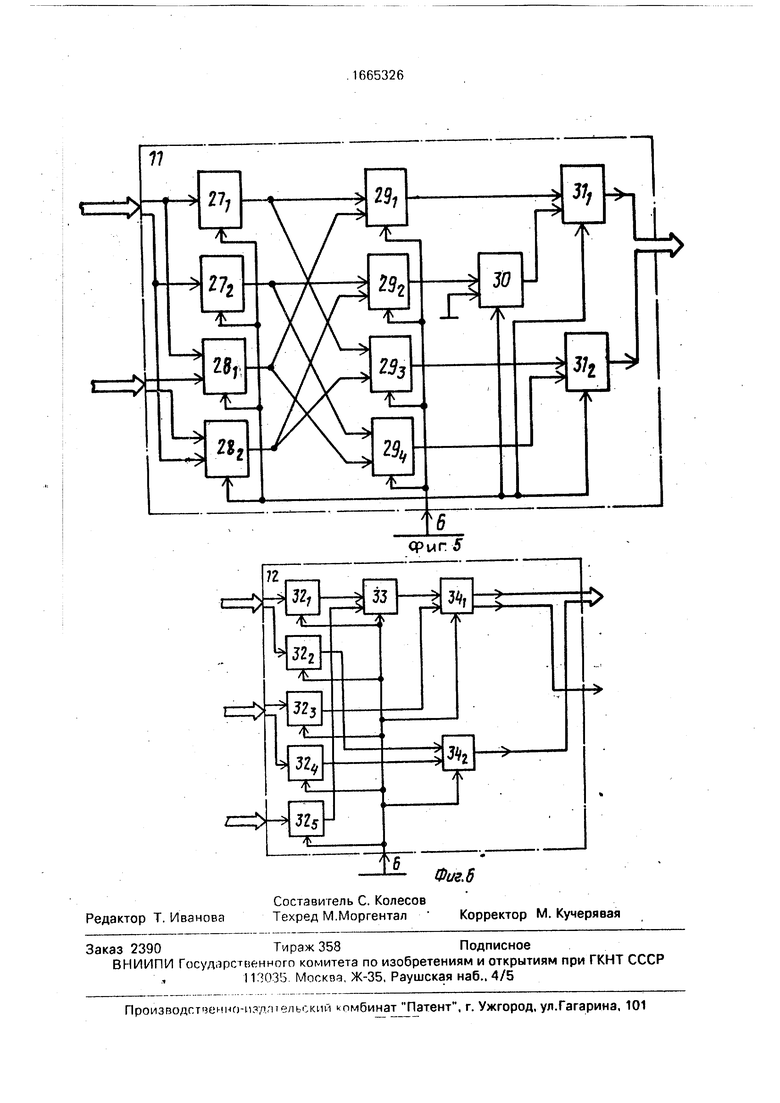
Блок 11 умножения (см.фиг.5) состоит из буферных регистров 27.1, 27.2, 28.1, 28.2 (с индексами 1 и 2 соответственно для действительных и мнимых частей комплексных операндов), многоразрядных быстродействующих умножителей 29.1-29.4, мультиплексора 30 и сумматоров 31.i и 31.2 (для действительной и мнимой частей операндов). Сумматоры 31.1 и 31.2. осуществляющие сложение/вычитание, выполнены на ариф- F метическо-логических устройствах (АЛУ).
Блок 11 умножения выполняет действия с плавающей запятой как с действительны ми, так и с комплексными занчениями операндов, поступающими на его второй и 10 третий входы. Комплексные умножения реализуются четырьмя умножениями и двумя сложениями/вычитаниями действительных и мнимых частей комплексных операндов. Для организации конвейерной обработки 15 на входах блока умножения 11 имеются буферные регистры 27 1. 27.2 и 28.1, 28.2. Регистры 28 i, 28.2 -двухвходовые для возможности значения обоих операндов из блока 9 ОЗУ.20
Для выполнения действительных умножений через мультиплексор 30 на один из входов действительного сумматора 31 1 поступают нули. Через первый вход в блок множения 11 из шины управления б посту- 2Г5 пают управляющие коды, определяющие его действия. Блок 12 суммирования см.фиг.6) состоит из входных регистров З2.г32.5,(32 1. 32 зи 32 здля действительных и 32 2 и 32 4 для мнимых частей операндов), 30 мультиплексора 33 и сумматоров 34 i и 34 2 для действительных и мнимых значений соответственно).
Блок суммирования 12 предназначен для сложения/вычитания с плавающей за- 35 пятой как действительных, так и комплексных значений операндов, поступающих на его второй и третий входы, связанные с регистрами 32.1-32.4 соответственно. Конвейерный режим сложений/вычитаний 40 обеспечивается наличием входных регистров 32. Сложения/вычитания производятся сумматорами 34, выполненными на АЛУ. С помощью мультиплексора 33 действительный сумматор 34 1 при вычислении функ- 45
ции фильтра вместо сигнала, поступающего второго входа на сумматоры 32.1,32.2, производит вычитание сигнала с третьего входа, поступающего на сумматоры 32 з. 32 4 из значения порога, поступающего с четверто- 50 го входа на сумматор 32.5- При этом с первого выхода сумматора 34.1 поступают лишь действительные значения результата. а на втором выходе появляется сформированный сигнал Больше/меньше. Первый 55 вход блока суммирования 12 связан с шиой управления 6, откуда получает коды,
правляющие его действиями. Коммутатор 13 выполнен на микросхемах, позволяющих пропускать на выход оДин из трех входных
операндов При вычислении идеализированной амплитудно-частотной характеристики (АЧХ) полосового фильтра - это константы 1 или О, поступающие через третий или четвертый вход коммутатора на его выход по сигналу соответственно Боль- ше/меньше на его пятом входе. В остальных случаях - это комплексные операнды вычислений, поступающие на его второй вход.
В устройстве корреляция в реальном времени без ограничения длительности опорного сигнала с одновременным увеличением динамического диапазона коррелог- рамм и уменьшением обьема блока памяти выполняется совместно с перестраиваемой полосовой фильтрацией сейсмоданных. Вычисления проводятся в частотной области методом секционированной свертки с перекрытием с накоплением. Вычисление корре- лограмм при этом производится N отдельными участками равной длины.
Коррелятор работает следующим образом.
В вибросейсморазведке из геофизических соображений вырабатывают параметры корреляциидлительность коррелограммы К. опорного сигнала S, а также длительность функции полосового фильтра Ф, тип функции окна фильтра G (Т) - время и конкретные значения порога из имеющихся их наборов в блоке 10 ПЗУ, определяющих параметры фильтрации. Обычно Ф K/N. Выбранным длительностям К, S. Ф при определенном интервале квантования входных данных соответствуют определенные количества их цифровых отсчетов (с теми же обозначениями). Количество отсчетов сейсмоданных X, подлежащих корреляции (для каждого сейсмического канала), равно сумме отсчетов S и К. Величина участка коррелограммы равна K/N отсчетов. Выбранные значения параметров устанавливаются на пульте вибросейсмостанции, и перед началом работы по интерфейсной шине через ввод-вывод управления 8 загружаются в регистр 14 центрального контроллера 2 в виде кодов. После их дешифрования процессор 15 центрального контроллера 2 настраивает коррелятор на выполнение требуемых режимов работы с помощью многоразрядной шины управления 6, а также выполняет обнуление блока памяти 4 и блока 9 ОЗУ. После этого из станции через ввод-вывод данных 7. модуль 1 ввода-вывода. Шину данных 5. контроллер 3 блока памяти во входной буфер 22 блока 4 памяти начинают поступать отсчеты сейсмоданных X и опорного сигнала S. где они разделяются на участки величиной также
K/N отсчетов Выходной буфер 22 блока 4 памяти состоит из двух неравных частей Большая члсть ею X предназначена для за писи данных сейсмических каналов X и имеет объем 3 K/N ) Ф ячеек на каждый сейсмоканал с циклической адресацией ячеек по модулю MOD K/N. Меньшая часть буфера 22 S предназначена для записи одного канала опорного сигнала S и имеет объем также 3 -К/М+Ф ячеек с циклической адресацией ячеек по MOD K/N.
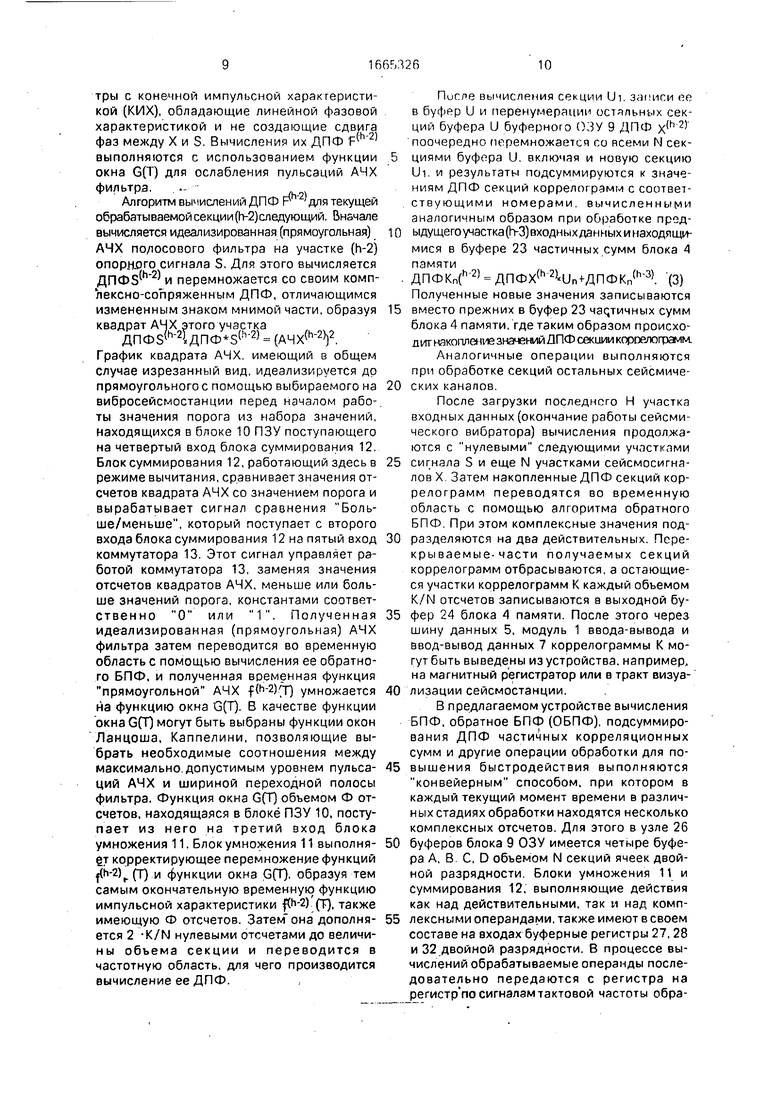
В установившемся режиме работы для опорного и одного из сейсмических каналов во время загрузки очередного текущего участка с номером h входных данных заполняются K/N ячеек входного буфера 22 блока 4 памяти в частях X и S. В остальном объеме большей части X буфера 22, равном ячеек (на один канал) и заполненном ранее загруженными отсчетами X на предыдущих участках, в это время формируется текущая обрабатываемая секция (h-2). Она состоит из участка (h-2), дополненного справа последующим участком (п-1) и слева Ф отсчетами предыдущего участка (h-З) В части S входного буфера 22 аналогично формируется секция (h-2) с числом отсчетов, тоже равным 2 K/Ni-Ф. Она состоит из K/N отсчетов S из загруженного ранее участка (h-2), дополненного справа и слева нулевыми отсчетами. При этом на каждом последующем текущем участке у секций X и S образуется перекрытие отсчетов на величину K/N+Ф, т.е. более 50%. Кроме этого, число отсчетов секций должно быть кратным степени 2. Это необходимо для удобства и правильности дальнейших вычислений сверток в частотной области. Из сформированных секций X и S считываются пары соседних отсчетов и образованные тем самым K/N+Ф комплексных отсчетов секций (h-2) поступают на вычисление дискретного преобразования Фурье (ДПФ) (по алгоритму БПФ) Вычисление коррелограммы К с предварительной полосовой фильтрацией на текущем обрабатываемом участке (h-2) выполняется N секциями с помощью свертки в частотной области и может быть представлено в виде
дпФкЛ
(Ь 2 П+ЯДПФКЛ3),(1)
где п- 1,2N:
h 1.2H+N:
Н - число участков сигнала S каждое с числом отсчетов K/N, на которое он разделяется (недостающие отсчеты дополняются нулями);
( п+1) - ДПФ, комплексно-сопряженное вычисленному ДПФ секции S с номером (h-2-n+1), отличающееся лишь знаком мнимой части - оператор корреляцииДПФГ nl - ДПФ полосового фильтра с полосой пропускания соответствующей полосе частот содержащихся в секции с номером (h-2-пП). и близкой к прямоугольной
АЧХ фильтра пульсации которой сглажены с помощью выбранной функции окна; G(T) - оператор фильтрации. В частотной области физический смысл первого произведения выражения (1) пред0 ставляет собой посекционную фильтрацию текущей секции сейсмосигнала x h 2 N полосовыми фильтрами, соответствующими N секциям опорного сигнала S, посланным вибратором в грунт ранее и имеющим от
5 (h-2) до (h-2-N+1). Второе произведение выражения (1) представляет собой посекционную корреляциюрезультатов профильтрованного, очищенного сейсмосигнала X с теми же N секциями сигнала S.
0 Подсуммирование по формуле (1) представляет собой посекционное накопление кор- релограмм на каждом текущем участке обработки.
Для многоканальных устройств, при
5 практической реализации выражения(1), используя свойства ассоциативности произведения, удобно представить N произведений операторов фильтраций и корреляций в виде N секций обобщенного
0 оператора обработки U, включающего в себя фильтрацию и корреляцию, согласно выражению
ДПФР(н 2 п+11дПФ 5() Un. (2) N секций оператора U, общие для всех
5 сейсмических каналов X, хранятся в буфере оператора U узла 26 буферов блока 9 ОЗУ, имеющем соответственно N секций ячеек. При вычислениях в реальном времени N секций оператора U формируются следующим
0 образом. На текущем участке загрузки данных h считываются отсчеты секций (п-2)сиг- налов S (соответствующих п 1), вычисляются произведения (2) и записываются в ту секцию ячеек буфера U, где нахо5 дятся значения самой старой секции UN-M. полученной ранее при обработке.секций сигналов S с номером (h-2-N) и не участвующей в новых вычислениях. Этой новой секции оператора U присваивается номер 1 (rv
0 1). Номера всех остальных секций буфера U полученных ранее аналогичным образом при обработке предыдущих участков выходных данных, при этом увеличиваются на единицу. В дальнейшем и эта новая секция
5 Ui под все возрастающими номерами (от 2 до N) будет использована при обработке еще (N-1) последующих секций входных данных.
Для каждой текущей секции (h-2) сигнала S при получении Ui используются фильтры с конечной импульсной характеристикой (КИХ), обладающие линейной фазовой характеристикой и не создающие сдвига фаз между X и S. Вычисления их ДПФ выполняются с использованием функции окна G(T) для ослабления пульсаций АЧХ фильтра. .Алгоритм вычислений ДПФ Р ; для текущей обрабатываемой секции (h-2) следующий. Вначале вычисляется идеализированная (прямоугольная) АЧХ полосового фильтра на участке (h-2) опорного сигнала S. Для этого вычисляется и перемножается со своим комплексно-сопряженным ДПФ, отличающимся измененным знаком мнимой части, образуя квадрат АЧХ этого участка
ДПФ5( () (A4X())2. График квадрата АЧХ. имеющий в общем случае изрезанный вид, идеализируется до прямоугольного с помощью выбираемого на вибросейсмостанции перед началом рабо-. ты значения порога из набора значений, находящихся в блоке 10 ПЗУ поступающего на четвертый вход блока суммирования 12. Блок суммирования 12, работающий здесь в режиме вычитания, сравнивает значения отсчетов квадрата АЧХ со значением порога и вырабатывает сигнал сравнения Больше/меньше, который поступает с второго входа блока суммирования 12 на пятый вход коммутатора 13. Этот сигнал управляет работой коммутатора 13, заменяя значения отсчетов квадратов АЧХ, меньше или больше значений порога, константами соответственно О или 1. Полученная идеализированная (прямоугольная) АЧХ фильтра затем переводится во временную область с помощью вычисления ее обратного БПФ, и полученная временная функция прямоугольной АЧХ f(h 2)T) умножается на функцию окна G(T). В качестве функции окна G(T) могут быть выбраны функции окон Ланцоша, Каппелини, позволяющие выбрать необходимые соотношения между максимально.допустимым уровнем пульсаций АЧХ и шириной переходной полосы фильтра. Функция окна GfT) объемом Ф отсчетов, находящаяся в блоке ПЗУ 10, поступает из него на третий вход блока умножения 11. Блок умножения 11 выполняет корректирующее перемножение функций и функции окна G(T). образуя тем самым окончательную временную функцию импульсной характеристики fO1 2) (Т), также имеющую Ф отсчетов. Затем она дополняется 2 -K/N нулевыми отсчетами до величи- ны объема секции и переводится в частотную область, для чего производится вычисление ее ДПФ.
Писле вычисления секции UL записи ее в буфер U и перенумерации остальных секций буфера U буферного ОЗУ 9 ДПФ x h 2 поочередно перемножается со всеми N сек- циями буфера U, включая и новую секцию UL и результаты подсуммируются к значениям ДПФ секций коррелограмм с соответствующими номерами, вычисленными аналогичным образом при обработке пред0 ыдущегоучастка(Ь-3)входныхданныхинаходящи- мися в буфере 23 частичных сумм блока 4 памяти
. ДПФКп() ДПФХ(2)«ип+ДПФКп(). (3) Полученные новые значения записываются
5 вместо прежних в буфер 23 частичных сумм блока 4 памяти, где таким образом происходит накопление значений ЛПФ секции короелограмм. Аналогичные операции выполняются при обработке секций остальных сейсмиче0 ских каналов.
После загрузки последнего Н участка входных данных (окончание работы сейсмического вибратора) вычисления продолжаются с нулевыми следующими участками
5 сигнала S и еще N участками сейсмосигна- лов X Затем накопленные ДПФ секций коррелограмм переводятся во временную область с помощью алгоритма обратного БПФ. При этом комплексные значения под0 разделяются на два действительных. Перекрываемые-части получаемых секций коррелограмм отбрасываются, а остающиеся участки коррелограмм К каждый объемом K/N отсчетов записываются в выходной бу5 фер 24 блока 4 памяти. После этого через шину данных 5, модуль 1 ввода-вывода и ввод-вывод данных 7 коррелограммы К могут быть выведены из устройства, например, на магнитный регистратор или в тракт визуа0 лизации сейсмостанции.
В предлагаемом устройстве вычисления БПФ, обратное БПФ (ОБПФ), подсуммиро- вания ДПФ частичных корреляционных сумм и другие операции обработки для по5 вышения быстродействия выполняются конвейерным способом, при котором в каждый текущий момент времени в различных стадиях обработки находятся несколько комплексных отсчетов. Для этого в узле 26
0 буферов блока 9 ОЗУ имеется четыре буфера А, В. С, D объемом N секций ячеек двойной разрядности. Блоки умножения 11 и Суммирования 12. выполняющие действия как над действительными, так и над комп5 лексными операндами, также имеют в своем составе на входах буферные регистры 27, 28 и 32 двойной разрядности. В процессе вычислений обрабатываемые операнды последовательно передаются с регистра на регистр по сигналам тактовой частоты обработки. При этом над ними выполняются преобразования под управлением процессора 15 центрального контроллера 2. Так, при вычислении бабочки БПФ (базовая операция, включающая в себя комплексные перемножения и сложения) по основанию 2 и 4 применен алгоритм БПФ с постоянной структурой, требующий двух буферов, находящихся в узле 26 буферов блока 9 ОЗУ. Другие буферы узла 26 используются при этом для загрузки новых операндов входных данных. Значения коэффициентов Фурье при вычислении БПФ и обратного БПФ поступают из блока 10 ПЗУ. Так как при загрузке из сейсмостанции входных данных в блок 4 памяти и при обмене данными между блоком 4 памяти и блоком 9 ОЗУ используется одна и та же шина данных 5, то для разделения этих действий во времени, загрузка выполняется с приоритетом над обменом.
Технико-экономическая эффективность устройства определяется увеличение динамического диапазона коррелограмм за счет снижения уровня корреляционных шумов и уменьшением объема блока памяти коррелятора.
Формула изобретения Коррелятор вибросейсмических данных, содержащий модуль ввода-вывода, центральныйконтроллер,контроллер блока памяти, блок памяти, а также шину данных и шину управления, соединенные соответственно с первыми и вторыми входами модуля ввода-вывода, центрального контроллера, контроллера блока памяти.
0
третий вход которого соединен с входом блока памяти, причем третьи входы модуля ввода-вывода и центрального контроллера являются соответственно вводами-выводами данных управления коррелятора, отличающийся тем, что, с целью увеличения динамического диапазона коррелограмм путем снижения уровня корреляционных шумов, а также сокращения объема блока памяти, в него введены блок оперативного запоминающего устройства, блок постоянного запоминающего устройства, блок умножения, блок суммирования и коммутатор, при этом шина данных соединена с первым
5 входом блока оперативного запоминающего устройства, второй вход которого, вход блока постоянного запоминающего устройства и первые входы блока умножения, блока суммирования и коммутатора соединены
0 с шиной управления, выход блока оперативного запоминающего устройства соединен с вторыми входами блока умножения и блока суммирования, третий вход блока сумми- рования соединен с выходом блока
5 умножения, четвертый вход блока суммированиям третий вход блока умножения соединены с выходом блока постоянного запоминающего устройства, первый выход блока суммирования соединен с вторым входом коммутатора, третий и четвертый входы которого являются входами констант 1 и О, второй выход блока суммирования соединен с пятым входом коммутатора, вы.- ход которого соединен с третьим входом блока оперативного запоминающего устройства.
0
5


| название | год | авторы | номер документа |
|---|---|---|---|
| Субоптимальный нелинейный фильтр | 1990 |
|
SU1714618A1 |
| Арифметическое устройство для вычисления коэффициентов Фурье | 1986 |
|
SU1388893A1 |
| Анализатор спектра | 1977 |
|
SU669295A1 |
| АРИФМЕТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ ДИСКРЕТНОГО ПРЕОБРАЗОВАНИЯ ФУРЬЕ | 1991 |
|
RU2015550C1 |
| Процессор быстрых дискретных преобразований | 1989 |
|
SU1725227A1 |
| Устройство для формирования широкополосного случайного процесса | 1986 |
|
SU1432514A1 |
| Устройство для измерения относительной задержки импульсных сигналов | 1982 |
|
SU1068886A1 |
| Устройство для быстрого преобразования Фурье | 1985 |
|
SU1304034A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА С НЕИЗВЕСТНЫМИ ПАРАМЕТРАМИ | 1999 |
|
RU2154837C1 |
| Устройство для определения взаимной корреляционной функции | 1989 |
|
SU1689968A1 |
Изобретение относится к вибросейсмической разведке, в частности к корреляторам для преобразования вибросейсмических данных в импульсную форму. Цель изобретения - увеличение динамического диапазона коррелограмм путем снижения уровня корреляционных шумов, а также сокращение объема блока памяти. Коррелограммы вычисляются в реальном времени в частотной области с использованием алгоритма быстрого преобразования Фурье. Вычисления производятся методом секционированной свертки с разделением на секции как входы данных, так и коррелограммы совместно с проведением полосовой фильтрации входных данных. Для этого в коррелятор введены блоки оперативного запоминающего устройства, постоянного запоминающего устройства, умножения, суммирования и коммутатор. 6 ил.
Фиг. 2
Фиг. 4
Фиг 5
| Патент США №4592031, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |
| Устройство для корреляционного преобразования вибрационных сейсмозаписей | 1982 |
|
SU1081592A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Солесос | 1922 |
|
SU29A1 |
| Т,Scales, Three Dimensial Fiber Optic Vlbrosels Data Asquisition | |||
| Материалы фирмы Exploration Products Division Geosource, USA. | |||
