Изобретение относится к станкостроению и может быть использовано для обра ботки конических поверхностей и нарезания на них резьб с применением конусной линейки с устройством цифровой индикации.
Целью изобретения являемся повышение точности и производительности обработки путем обеспечения точности отсчета перемещений суппорта при обработке деталей или настройке на обработку.
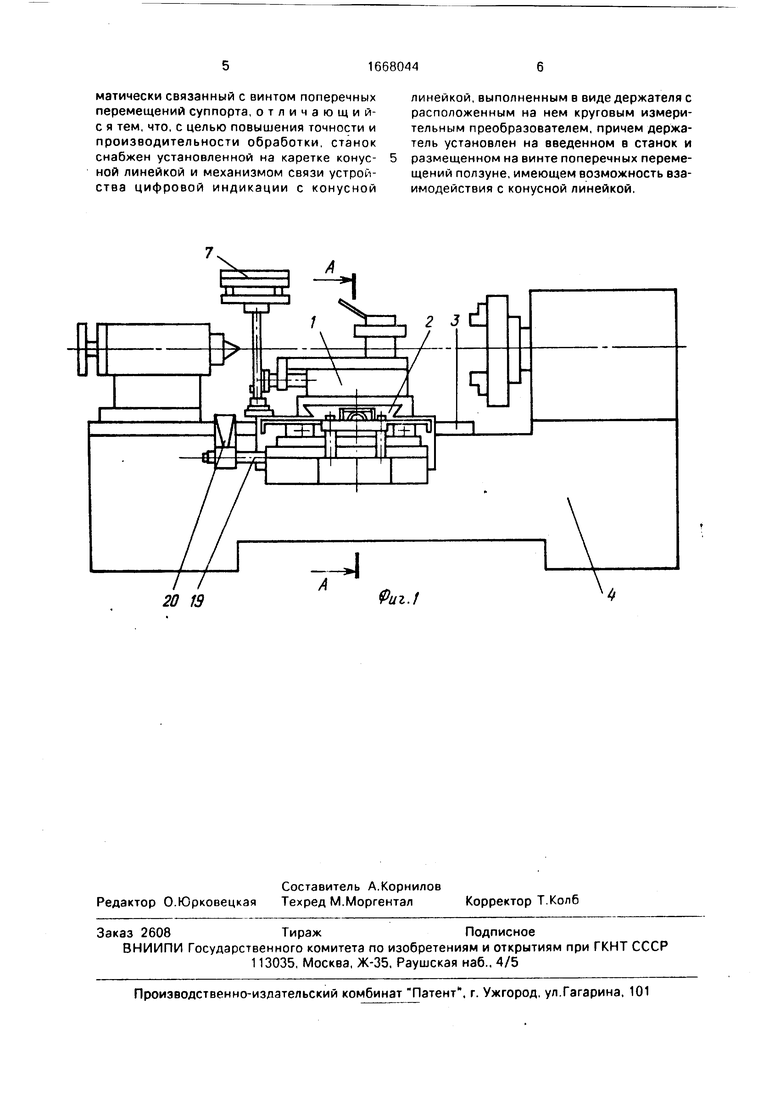
На фиг.1 изображен токарно-винторез- ный станок, вид сзади: на фиг.2 - разрез А - А на фиг.1.
Токарно-винторезный станок содержит суппорт 1, смонтированный на каретке 2, размещенной на направляющих 3 станины 4 с возможностью перемещения и оснащенной направляющими типа ласточкина хвоста, На станке имеется устройство цифровой индикации (УЦИ) поперечных перемещений суппорта 1, включающее круговой измерительный преобразсвл- тель 5 (фиг.2), установленный на винте о поперечных перемещений суппорта 1, и счетчик 7. смонтированный на каретке 2 с противоположной стороны от рабочего места. Станок оснащен устройством, обеспе чивающим кинематическую связь УЦИ поперечных перемещений суппорта 1 с введенной в станок конусной линейкой 8, смонтированной посредством салазок 9 на каретке 2. На салазках 9 предусмотрена регулировка по углу разворота конусной линейки 8. Салазки 9 снабжены направляющими типа ласточкина хвоста. Устрой::т во выполнено в виде держателя 10. который жестко установлен на ползуне 11 конусной линейки 8. Ползун 11 смонтирован посредством подшипников 12 качения на винте 6 поперечных перемещений суппорта 1 и имеет возможность перемещаться посредством камня 13 по пазу 14 конусной линейки 8. При перемещении по пазу 14 ползун 11 скользит в направляющих кронштейна 15, закрепленного на каретке 2. Держатель 10 несет круговой измерительный преобразователь 5 УПИ поперечных перемещений суппорта 1, смонтированный в отверстии, выполненном соосно с осью держателя 10. и удерживаемый от осевых перемещении в нем посредством фланца 16. Держатель 10 обеспечивает взаимодействие кругового измерительного преобразователя 5 с винтом 6 поперечных перемещений суппорта 1. От механических повреждений устрой ство защищено кожухами 17 и 18 Салазки 9 снабжены тягой 19, которая связынаог
салазки 9 с кронштейном 20, зафиксированным на направляющих 3 станины 4. Длина тяги 19 больше рабочего хода суппорта 1. Станок работает следующим образом.
Сначала станок настраивают на обработку конической поверхности детали или для нарезания конической резьбы. Для этого определяют положение салазок 9, связы- вают их тягой 19 с кронштейном 20,
зафиксированным на направляющих 3 станины 4. Конусную линейку 8 поворачивают относительно продольного перемещения каретки 2 на требуемый угол в зависимости от того, какую конусность необходимо получить на обрабатываемой детали. Настраивают суппорт и каретку 2 на требуемую величину перемещений и включают станок в работу.
При продольном перемещении каретки
2 но направляющим 3 станины 4 суппорт 1 перемещается совместно с кареткой 2 в том же направлении. При этом салазки 9 посредством тяги 19 и кронштейна 20, зафиксированного на направляющих 3 станины 4, застопорены относительно каретки 2, которая в это время скользит по няправляющим типа ласточкина хвоста. выполненным на салазках 9. Поскольку конусная линейка 8, повернутая на требуемый угол относительно продольного перемещения каретки 2, параллельного оси центров станка, зафиксирована жестко относительно салазок 9, ползун 11 посредством камня 13 перемещается по пазу
14 конусной линейки 8. В результате траектория резца складывается из двух движений: продольного от каретки 2 по направляющим 3 станины 4 и поперечного от ползуна 11 по пазу 14 конусной линейки
8. Устройство, выполненное в виде держателя 10, жестко установленного на ползуне 11 конусной линейки 8 и несущего круговой измерительный преобразователь 5, взаимодействующий с винтом 6 поперечных перемещений суппорта 1, обеспечивает кинематическую связь конусной линейки 8 с УЦИ поперечных перемещений суппорта 1, позволяя круговому измерительному преобразователю 5 следить за
перемещениями суппорта 1 и, преобразуя, выдавать данные на счетчик 7.
Формула изобретения Токарно-винторезный станок, содержа- щий суппорт, смонтированный на каретке, размещенной на направляющих станины с возможностью перемещения и несущей устройство цифровой индикации поперечных ремещений суппорта, включающее круго- во 1 измерительный преобразователь, кинемагически связанный с винтом поперечных перемещений суппорта, отличающий- с я тем, что, с целью повышения точности и производительности обработки, станок снабжен установленной на каретке конус- ной линейкой и механизмом связи устройства цифровой индикации с конусной
линейкой, выполненным в виде держателя с расположенным на нем круговым измерительным преобразователем, причем держатель установлен на введенном в станок и размещенном на винте поперечных перемещений ползуне, имеющем возможность взаимодействия с конусной линейкой.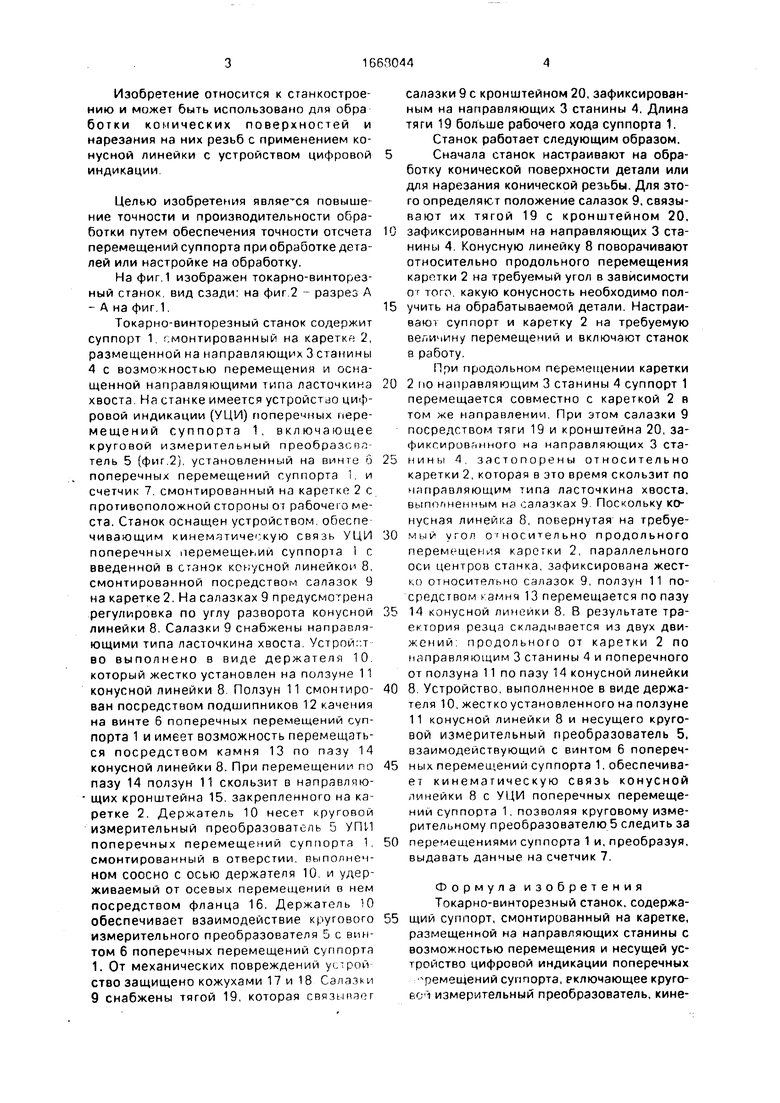
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНЫЙ ТОКАРНЫЙ СТАНОК | 1996 |
|
RU2103114C1 |
| Суппорт токарно-многоцелевого станка | 1991 |
|
SU1816626A1 |
| Устройство для управления деформациями в системе СПИД | 1982 |
|
SU1071371A1 |
| Устройство к токарно-винторезному станку для нарезания зубчатых изделий | 1984 |
|
SU1197799A1 |
| ТОКАРНЫЙ ОБРАБАТЫВАЮЩИЙ ЦЕНТР | 2019 |
|
RU2727133C1 |
| ЗУБОДОЛБЕЖНЫЙ СТАНОК | 2010 |
|
RU2454303C2 |
| СТАНОК ДЛЯ ОБРАБОТКИ АРОЧНЫХ ЗУБЬЕВ ЗУБЧАТЫХ КОЛЕС | 1994 |
|
RU2074794C1 |
| Токарно-винторезный станок | 1981 |
|
SU1160926A3 |
| Токарный станок | 1980 |
|
SU973241A1 |
| Токарный станок | 1983 |
|
SU1119779A2 |
Изобретение относится к станкостроению и может быть использовано для обработки конических поверхностей и нарезания на них резьб с применением конусной линейки с устройством цифровой индикации. Целью изобретения является повышение точности и производительности обработки путем обеспечения точности отсчета перемещений суппорта при обработке деталей или настройке на обработку. При продольном перемещении каретки 2 ползун 11 посредством камня 13 перемещается по пазу 14 конусной линейки 8. В результате траектория резца складывается из двух движений: продольного от каретки 2, перемещающейся по направляющим станины, и поперечного от ползуна 11, перемещающегося по пазу 14 конусной линейки 8. Держатель 10 установлен на ползуне 11 и несет круговой измерительный преобразователь 5, взаимодействующий с винтом 6 поперечных перемещений суппорта и обеспечивающий кинематическую связь конусной линейки с устройством цифровой индикации поперечных перемещений суппорта и выдачу информации о перемещении суппорта на счетчик. 2 ил.
Фиг.1
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Рязанское СКВ станкостроения, 1986. | |||
