Изобретение относится к горной промышленности и может быть использовано при автоматизации горных машин, в частности экскаваторов-драглайнов.
Целью изобретения является повышение точности и защиты.
На чертеже представлена блок-схема устройства защиты экскаватора-драглайна от аварийных режимов при транспортировке ковша.
Устройство содержит датчики длины подъемного каната 1,длины тягового каната 2, усилий в подъемном канате 3 и усилий в тяговом канате 4, источник 5 постоянного напряжения, блок 6 вычисления усилий в подъемном и тяговом канатах, первый 7 и второй 8 блоки деления, блок 9 сравнения, два компаратора 10 и 11, элемент ИЛИ 12. блок 13 привода подъема и тяги, причем вход блока б соединен с датчиками 1 и 2 длин подъемного и тягового канатов, а выход - с входом второго блока 8 деления, датчики 3 и 4 усилий в подъемном и тяговом канатах соединены с входом первого блока . 7 деления, а выходы обоих блоков деления подключены к входам блока 9 сравнения, а также к входам двух компараторов 10 и 11, к вторым входам компараторов подключен источник 5 постоянного напряжения выхо ды компараторов и блока 9 сравнения соединены с входами элемента ИЛИ 12. а его выход соединен с блоком 13 привода подъема и тяги.
Устройство работает следующим образом.
В процессе работы непрерывно и одновременно измеряются усилия в подъемном Fn и тяговым FT канатах и в первом блоке 7 деления определяется отношение этих уси
лий - . Текущие значения длин подъемноFT
го 1П и тягового IT канатов также непрерывно измеряются и поступают в блок 6 вычисления, где значения длин канатов преобразуются в значения углов, образуемых осью стрелы с подъемным и тяговым fi канатами. При этом углы определяются по формулам
In 2 - 1т 2 + I 2
рп - arccos
Z I In
рг - arcsln sin (fa V
Каждое из усилий в отдельности определяется как функция веса ковша и координат его положения в пространстве
Fn
() sin( )
р.Ч К,ijVJ -J
Г т . /
0
5
QKJ COS ()
sin( где f - угол между осью стрелы и горизонтом.
Тогда отношение усилий не зависит от веса ковша и определяется только координатами ковша
/ Fn у cojjЈ li l I FT } cos (E + у,) Это отношение определяется во втором блоке 8 деления.
Сигналы, пропорциональные опреде п .. ,Fn i
ленным отношениям усилии- и
FT
FT
) подаются на компараторы соответственно 10 и 11. на вторые входы которых поступает сиг- нап от источника 5 постоянного напряжения, пропорциональный допустимому
4соответствующему гра0 значению
I }
(.р-Моп
нице рабочей зоны. В рабочей зоне определенное от датчиков отношение усилий меньше допустимого, и сигнал на вход элемента ИЛИ от компараторов не поступает. При входе KORUJa в границу рабочей зоны
0
5
0
5
0
5
определяемые значения ,Fn
Fn / Fru
- (или --) станоFTП
вятся равными (-)ДОп и на выходе компараГт
гора появляется сигнал, который поступает на вход элемента ИЛИ. Кроме того, сигналы от блоков деления поступают на блок 9 сравнения, где сравниваются между собой, и, если их разность достигает величины, больше допустимой, на выходе блока сравнения появляется сигнал, также поступающий на вход элемента ИЛИ.
Таким образом, на вход элемента ИЛИ могут поступать либо сигналы отношений в подъемном и тяговом канатах, сигнализирующие о том. что ковш входит в опасную зону, причем это отношение определяется двояко - от датчиков усилий и от датчиков длин канатов, либо сигнал от блока сравнения, сигнализирующий о том, что рассогласование значений - стало недопустимо
гт
велико (или один из каналов определения отношений не работает). Любой из этих сигналов, поступающий на вход элемента ИЛИ 12, вызывает его срабатывание, и элемент ИЛИ подает сигнал защиты на блок 13 привода подъема и тяги.
Предлагаемое устройство защиты позволяет по сравнению с существующим более точно определять границу рабочей зоны и осуществлять контроль нормальной работы системы защиты. Это повышает точность и надежность защиты экскаватора, что в конечном итоге ведет к снижению простоев и повышению производительности. Формула изобретения Устройство защиты драглайна от аварийных режимов, включающее в себя датчики усилий в подъемных и тяговых канатах, соединенные с первым блоком деления, источник постоянного напряжения, соединен- ный с первым компаратором, второй компаратор, блок привода, отличающееся тем, что, с целью повышения точности, в него введены датчики длины подъемных и тяговых канатов, блок вычисления усилий в подъемном и тяговом канатах, второй блок деления, блок сравнения и элемент ИЛИ, при этом выходы датчиков
0
длины подъемного и тягового канатов подключены к соответствующим входам блока вычисления усилий в подъемном и тяговом канатах, выход которого через второй блок деления подключен к первым входам второго компаратора и блока сравнения, выход первого блока деления подключен к вторым входам блока сравнения и первого компаратора, а с вторым входом второго компаратора соединен источник постянного напряжения, выходы блока сравнения и обоих компараторов соединены с соответствующими входами элемента ИЛИ, выход которого подключен к блоку привода подъема и тяги.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ защиты драглайна от аварийных режимов при транспортировке ковша и устройство для его осуществления | 1978 |
|
SU744076A1 |
| Способ оптимального управления электроприводами драглайна | 1979 |
|
SU926163A1 |
| Способ определения массы ковша экскаватора-драглайна | 1978 |
|
SU861485A1 |
| Способ определения веса ковша экскаватора-драглайна | 1976 |
|
SU662820A1 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Способ управления процессом черпания экскаватора-драглайна и устройство для его осуществления | 1980 |
|
SU910957A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1986 |
|
SU1320352A1 |
| Устройство управления электроприводом тяги экскаватора-драглайна | 1981 |
|
SU956697A1 |
| Устройство для определения расстояния ковша драглайна от вертикальной плоскости стрелы | 1977 |
|
SU657130A1 |
| СПОСОБ ЗАЩИТЫ ТЯГОВОГО КАНАТА ЭКСКАВАТОРА-ДРАГЛАЙНА ОТ КРИТИЧЕСКИХ НАГРУЗОК И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЗАЩИТА О'АЛЕКС,А) | 1994 |
|
RU2082855C1 |
Изобретение относится к горной пром-сти и м.б. использовано при автоматизации горных машин. Цель - повышение точности защиты экскаватора - драглайна от аварийных режимов. Устр-во содержит датчики усилий в подъемных 3 и тяговых 4 канатах, блок 1 деления, источник 5 постоянного напряжения, компараторы 10, 11 и блок 13 привода подъема и тяги. Дополнительно в устр-во введены датчики длины подъемных 1 и тяговых 2 канатов, блок 6 вычисления усилий в подъемном и тяговом канатах, второй блок 8 деления, блок 9 сравнения и элемент ИЛИ 12. В процессе работы непрерывно и одновременно датчиками 3 и 4 измеряются усилия в подъемном Fп и тяговом Fт канатах и в блоке 7 деления определяется отношение этих усилий Fп/Fт. Датчиками 1 и 2 непрерывно измеряются значения длин подъемного Lп и тягового Lт канатов, которые поступают в блок 6 вычисления, где преобразовываются в значения углов, образуемых осью стрелы с подъемным φп и тяговым φт канатами и подаются на вход блока 8 деления. Здесь определяется отношение (Fп/Fт), которое не зависит от массы ковша. Сигналы, пропорциональные отношениям Fп/Fт и (Fп/Fт)Ъ подаются на входы блока 9 и компараторов 10 и 11, где сравниваются с сигналом допустимого значения (Fп/Fт)доп, поступающим от источника 5 постоянного напряжения. С выходов компараторов 10 и 11, с выхода блока 9 сравнения поступают на входы элемента ИЛИ 12 сигналы, сигнализирующие либо о том, что ковш входит в опасную зону, либо о том, что рассогласование значений Fп/Fт стало недопустимо велико. По любому из сигналов элемент ИЛИ 12 срабатывает и подает сигнал защиты на блок 13 привода подъема и тяги. 1 ил.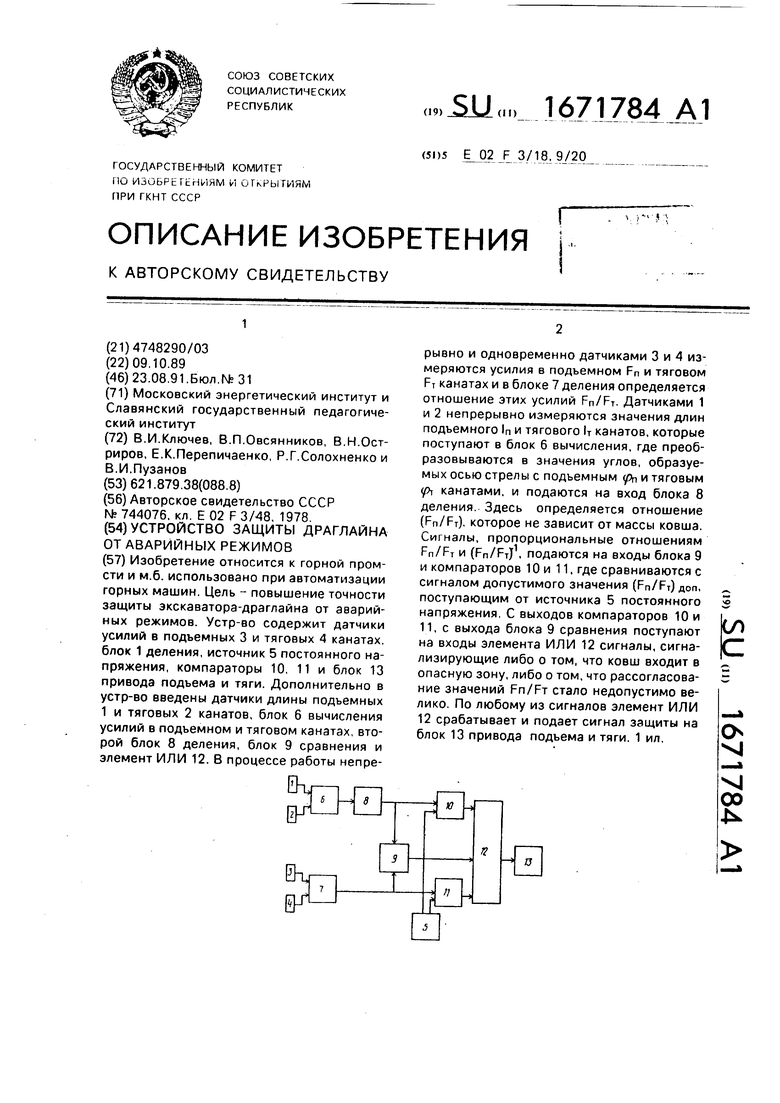
| Способ защиты драглайна от аварийных режимов при транспортировке ковша и устройство для его осуществления | 1978 |
|
SU744076A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
