(5t) СПОСОБ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ДРАГЛАЙНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления электроприводом тяги экскаватора-драглайна | 1981 |
|
SU956697A1 |
| Устройство управления процессом транспортирования ковша драглайна | 1988 |
|
SU1544898A1 |
| Устройство для управления электрическим приводом тяги драглайна | 1975 |
|
SU717228A1 |
| Способ защиты драглайна от аварийных режимов при транспортировке ковша и устройство для его осуществления | 1978 |
|
SU744076A1 |
| Способ автоматического управления процессом транспортировки ковша драглайна | 1970 |
|
SU627219A1 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Способ оперативного контроля использования экскаватора-драглайна | 1986 |
|
SU1328451A1 |
| Способ управления электрическими приводами драглайна и устройство для его осуществления | 1978 |
|
SU742542A1 |
| Способ управления электрическим проводом тяги драглайна | 1976 |
|
SU703630A1 |
| Способ определения положения экскаватора-драглайна в пространстве | 1983 |
|
SU1121356A1 |
I
Изобретение относистя к автоматизации горного оборудования, а именно к способу управления электроприводами драглайна или подъеме груженного ковша.
В цикле экскавации драглайна значительное место по величине потребляемой основными приводами электроэнергии () занимает подъем груженого ковша. Электрическая энергия в процессе подъема расходуется на накопление потенциальной энергии ве-сом ковша, поднятого на заданную высоту и на потери. В связи с этим в качестве критерия оптимизации принят минимум потерь при сохранении производительности. Минимальные потери будут иметь место при подъеме ковша с минимальным натяжением канатов т.е. по траекториям наиболее удаленным от стрелы, которые располагаются на границе зоны саморазгрузки ковша.
Известен способ оптимального управления подъемом груженого ковша
драглайна, в котором контролируется угол между подъемным канатом и стрелой. В процессе подъема ковша с максимальными скоростями при достижении контролируемым углом определенного значения программно, скачком изменяется вид статической характеристики привода тяги, вызывая замедление его скорости II .
Недостатком этого способа является
10 отсутствие универсальности, так как при других скоростях приводов и из другой точки забоя потребовалось бы другое значение угла переключения и другой вид статической харак15теристики привода тяги.
Известен также способ автоматического управления процессом транспортировки ковша драглайна. По этому способу определяют величины углов
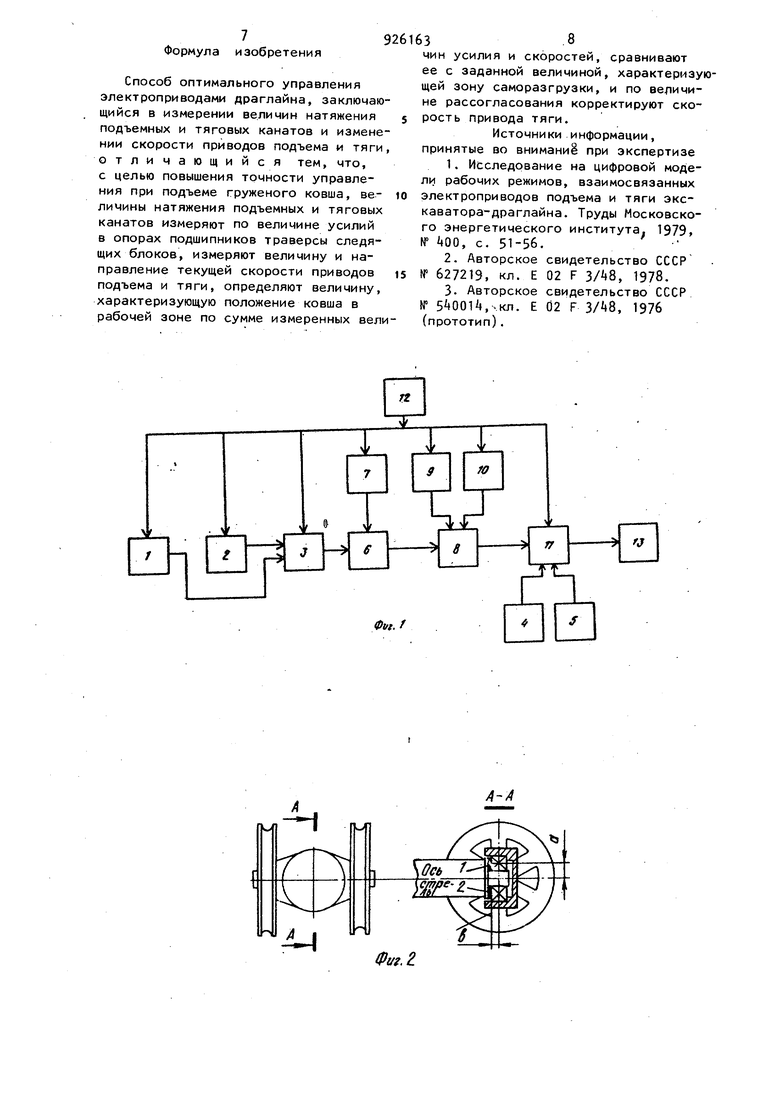
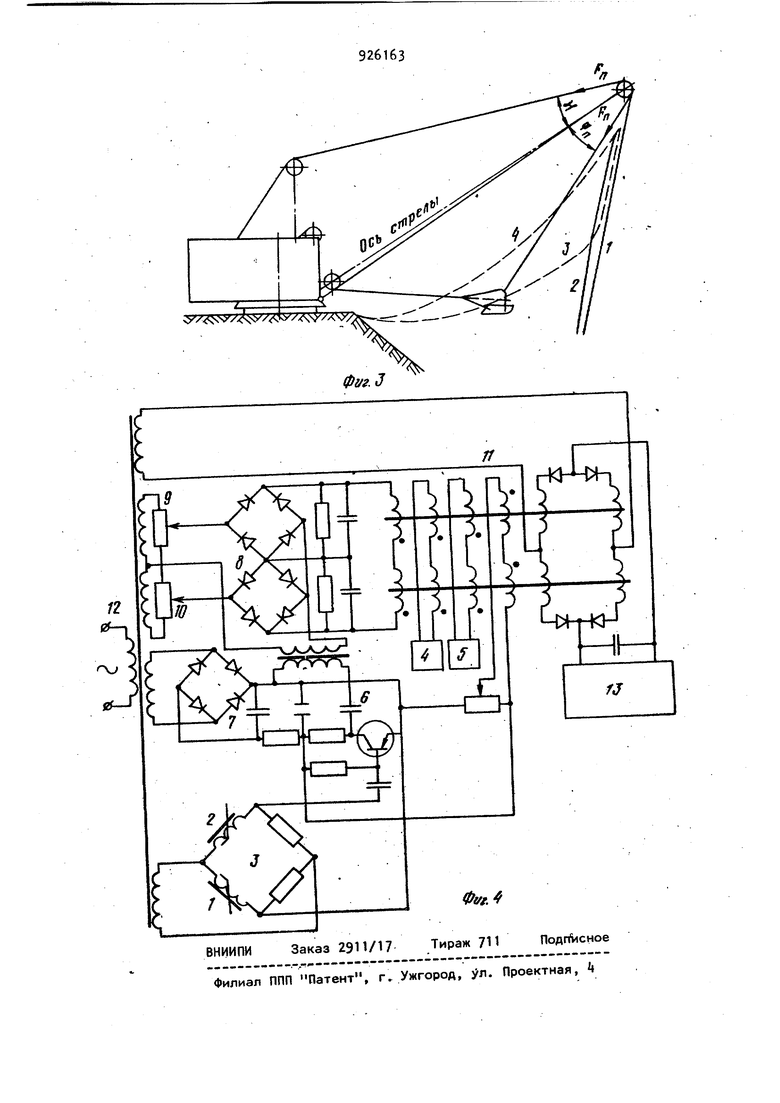
30 между подъёмным канатом и стрелой, тяговыми канатом и ст релой, косинуса суммы угла наклона стрелы к горизонту и угла между стрелой и подъ39емным канатом и синуса суммы углов между стрелой и подъемными и тяговыми канатами, далее определяют отноше ние между вычисленными косинусом и синусом, вычитают из него постоянную величину и при изменении знака разности подают на привод тя17и сигнал, пропорциональный этой разности и вызывающий снижение скорости привода тяги 2. Однако данный способ имеет сущест венные недостатки, заключающиеся в необходимости выполнения операции не посредственного измерения угла, для реализации которой применяются достаточно сложные механические устройства и электрические аппараты. В этом случае невозможно обойтись без механической связи между канатом и измерительным устройством, что снижа ет надежность способа. Кроме того, этот способ требует синусно-косинусные преобразователи и блок деления, которые как в аналоговом исполнении так и в цифровом представляют собой сложные устройства, не отличающиеся высокой надежностью, особенно в условиях эксплуатации экскаваторов-дра лайнов. И наконец, при этом способе не учитывается скорость, с которой ковш входит в зону саморазгр зки, и в динамике либо возможны опрок1 дывания ковша, либо требуется заблаговременное торможение тяги и подъем ковша будет происходить на некотором удалении от границы саморазгрузки, при больших натяжениях канатов, чем это требуется для оптимального управления. Наиболее близким к предлагаемому способу является способ управления движением ковша драглайна, заключающийся в измерении величин натяжения подъемных и тяговых канатов и изменении скорости приводов подъема и тя ги ОЗНедостатком этого способа является то, что он предполагает ручное уп равление подъемом груженого ковша. Так как ковш драглайна от цикла к циклу загружен неодинаково, вес его колеблется в довольно широких пределах. При этом машинист не может выбрать точно заданное натяжение канатов при котором их натяжение будет минимальным. Кроме того, из специфики работы драглайна следует, что при регулировании натяжения канатов вручную провести ковш вдоль границы 3 саморазгрузки сложно; при этом машинисту придется часто работать командоконтроллерами приводов подъема тяги. В результате возрастут динамические токи в якорных цепях электроприводов, а следовательно, увеличатся и потери электроэнергии. Цель изобретения - повышение точности управления электроприводами при подъеме груженого ковша драглайна. Поставленная цель достигается тем, что величины натяжения подъемных и тяговых канатов измеряют по величине усилий в опорах подшипников траверсы следующих блоков, измеряют величину и направление текущей скорости приводов подъема и тяги, определяют величину характеризующую положение ковша в рабочей зоне по сумме измеренных величин усилия и скоростей, сравнивают ее с заданной величиной, характеризующей зону саморазгрузки и по величине рассогласования корректируют скорость привода тяги. На фиг. 1 представлена блок-схема устройства, для реализации способа оптимального управления электроприводами драглайна; на фиг. 2 - схема установки датчиков усилий в опорах подшипников траверсы следящих блоков; на фиг. 3 - статическая граница введения коррекции скорости тяги, траектории подъема груженного ковша и приближенная граница саморазгрузки ковша; на фиг. - принципиальная схема устройства. Устройство содержит магнитоупругие датчики 1 и 2 усилий в опоре подшипников траверсы следящих блоков, включенные в измерительный мост 3, датчики k и S скорости привода подъема и. тяги, промежуточный усилитель 6 со своим источником 7 питания, фазочувствительный детектор 8, потенциометры 9 и 10 смеще-. ния, суммирующий магнитный усилитель. 11, питающий трансформатор 12 и привод 13 тяги. Способ осуществляется следующим образом. По мере перемещения ковша кгранице зоны саморазгрузки, которая практически представляет собой луч, обозначенный цифрой 1 на фиг. 3. из меряют датчиками 1 и 2 силу реакции в опоре подшипников траверсы следящих блоков (фиг. 2). Датчики Т и 2 меняют свое сопротивление пропорционально величине своей упругой дефо мации и, следовательно, силе реакции. Датчики включены в мостовую сх му 3 выход которой через промежуточный усилитель 6 подключен на вхо фазочувствительного детектора 8. На выходе детектора при отсутствии смещения сигналы изменяются пропорционально разности упругих деформаций .датчиков 1 и 2, которая изменяется в зависимости от угла между подъемным канатом и стрелой и от натяжени подъемного каната по следующему законуи K§Fn(sinV siriy), где Fp - натяжение подъемного каната;Ур - угол между нижней ветвью подъемного каната и стрелой ; -jp - угол между ветвью подъемного каната и стрелой; К - коэффициент, зависящий от величины упругих деформаций в узле следящих блоков и пропорциональный коэффициенту передачи датчиков, моста, усилителя и фазрчувс вительного детектора; а,Ь - конструктивные размеры подшипников траверсы следящих блоков. Сигнал и, который без учета сигнала смещения по мере увеличения ц принимает нулевое значение О при п уи нарастает до своего максималы ного значения при вертикальном положении подъемного каната. При наличии сигнала Ул смещения, устанавливаемого потенциометрами 9 и 10 сигнал и-и.. принимает нулевые значения при vM заданном смещением угле , близком к значению, соответствующему границе саморазгрузки ковша. Сигнал ФЧД поступает на управляющую обмотку МУН, на две других управляющих обмотки поступают сигналы с датчиков и 5 скоростей и приводов подъема и тяги, С выхода МУ11 сигнал поступае на вход привода 13 тяги. Сигналом и-и формируется статическая граница введения коррекции скорости тяги, обозначенная цифрой 2 на фиг. 3 В динамике сигналами с датчиков А и 5 скоростей приводов эта граница деформируется, отклоняяс вправо или влево от статической в за висимости от соотношения скоростей приводов, и формируется динамическая граница введения коррекции. Таким образом, при подъеме груженого ковша до пересечения им динамической границы введения коррекции суммарные управляющие ампервитки нереверсивного МУ11 отрицательны и на вход привода тяги корректирующий сигнал не поступает. При пересечении ковшом указанной границы знак ампервитков меняется и сигнал коррекции, поступающий с выхода МУП на вход привода 13 тяги, ьызывает изменение скорости тяги пропорционально рассогласованию с учетом соотношения скоростей приводов, что приводит к подъему ковша вдоль границы его саморазгрузки с минимальными потерями электроэнергии. Пример такой траектории показан на фиг. 3 под номером 3. На фиг. 3 приведены две траектории подъема груженого ковша из верхней точки забоя, как наиболее часто повторяющемся варианте. Траектория получена при таком подборе скорости тяги от себя, что достаточно было лишь одной перестановки командоаппаратов приводов в начальной точке подъема. К такой настройке соотношения скоростей стремятся при наладке для облегчения работы машиниста, при этом генератор тяги недоиспользуется по напряжению. Траектория 3 получена при полном использовании генератора тяги ° напряжению для ускорения вывода ковша к границе саморазгрузки. Траектория 3 экономичнее траектории Ц за счет более быстрого выхода ковша в зону малых натяжений подъемного каната и конечной жесткости механической характеристики привода подъема. При ручном управлении осуществить подъем ковша по траектории 3 машинист не может из-за сложности удержания ковша от опрокидывания в зоне малых натяжений тягового каната. Таким образом, применение способа позволяет автоматически обеспечить подъем ковша по траектории, при котором натяжение в канатах минимально, что сопровождается экономией электроэнергии, ростом производительности снижением нагрева электрических машин, а значит возможностью уплотнить цикл и поднять дополнительно производительность, улучшени,ем управляемости экскаватора, снижением утомляемости машиниста. 7 Формула изобретения Способ оптимального управления электроприводами драглайна, заключаю щийся в измерении величин натяжения подъемных и тяговых канатов и измене нии скорости приводов подъема и тяги отличающийся тем, что, с целью повышения точности управления при подъеме груженого ковша, величины натяжения подъемных и тяговых канатов измеряют по величине усилий в опорах подшипников траверсы следящих блоков, измеряют величину и направление текущей скорости приводов подъема и тяги, определяют величину, характеризующую положение ковша в рабочей зоне по сумме измеренных вел 38 чин усилия и скоростей, сравнивают ее с заданной величиной, характеризующей зону саморазгрузки, и по величине рассогласования корректируют скорость привода тяги. Источники информации, принятые во внимание при экспертизе 1.Исследование на цифровой модели рабочих режимов, взаимосвязанных электроприводов подъема и тяги экскаватора драглайна. Труды Московского энергетического института 1979 № 400, с. 51-56. 2.Авторское свидетельство СССР № 627219, кл. Е 02 F ЗЛ8, 1978. 3.Авторское свидетельство СССР № ,.кл. Е 02 F , 1976 (прототип).
А-А
Ж
Фиг. г
