1
Изобретение относится к землеройным машинам, точнее к одноковшовым экскаваторам, и может быть использовано для заШ.ИТЫ драглайнов от аварийных режимов.
Известны способы зашиты драглайна от удара ковша по стреле путем управления , приводом тяги в функции суммы длин подъемного и тягового канатов 1 иди в функции суммы углов между осью стрелы и направлениями этих канатов 2.
Недостатком этих способов является недостаточная надежность и сложность уст- Ю ройств, связанная с необходимостью установки механических датчиков длин канатов или датчиков между осью стрелы и канатами на вершине и у основания стрелы.
Наиболее близким к предлагаемому по технической сушности и достигаемому результату является способ зашиты драглайна от удара ковша по стреле при его транспортировке, заключаюшийся в том, что определяют отклонение положения ковша от границы рабочей зоны, характеризуемой сум- 20 мой усилий в подъемном и тяговом канатах, и в функции этого отклонения производят управление приводом, а установку зашиты
регулируют пропорционально алгебраической сумме скоростей приводов подъема и тяги.
Известно также устройство для осушествления указанного способа, содержаш,ее блок привода тяги, датчики усилий в тяговом и подъемном канатах, два суммирующих усилителя, два подключенных ко входу первого суммируюшего усилителя датчика скоростей приводов подъема и тяги, блок деления, блок дифференцирования 3.
Недостатком этого способа заш,иты драглайн.а от аварийных режимов при транспортировке ковша и устройства для его осуществления является недостаточная точность и надежность защиты.
Цель изобретения - повышение точности и надежности заш,иты от удара ковша по стреле и обеспечение защиты от саморазгрузки ковша.
Эта цель достигается тем, что в способе защиты драглайна от аварийных режимов при транспортировке ковша, заключающемся Б том, что определяют отклонение ковша от границы рабочей зоны, характеризуемой величинами усилий в тяговом и
подъемном канатах, и в функции этого отклонения производят управление приводом, при этом установку защиты регулируют пропорционально алгебраической сумме скоростей приводов подъема и тяги, определяют отношение усилий в тяговом и подъемном канатах, сравнивают .его со значениями, лежащими в допустимом диапазоне значений этого отношения, соответствующем положению коБща в рабочей зоне, и при отклонении отношения усилий от указанного диапазона его значений подают на привод тяги сигнал защиты. При этом границы допустимого диапазона значений отношения усилий в тяговом и подъемном канатах, соответствующего положению ковща в рабочей зоне, выбирают равными с одной стороны - косинусу угла между горизонтальной линией и линией, соединяющей точки схода канатов с тяговых и подъемных блоков, с другой стороны - минимальному отношению усилия в тяговом канате к весу ковша, при котором исключается опрокидывание ковща, определяют знаки разнос. ти между усилиями в подъемном и в тяговом канатах и разности между усилием в подъемном канате и постоянным сигналом, соответствующим весу порожнего ковша, и :при положительных знаках обеих разностей включают защиту.
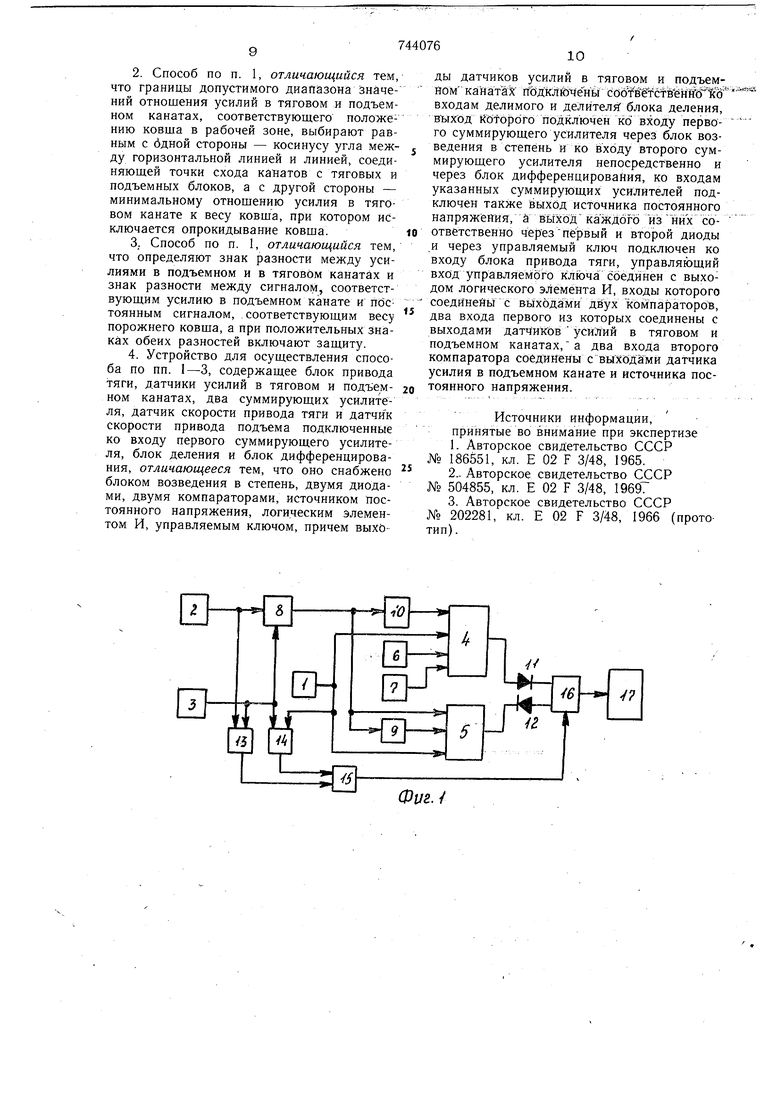
Устройство для осуществления способа защиты драглайна от аварийных режимов при транспортировке ковша, содержащее блок привода тяги, датчики усилий в тяговом и подъемном канатах, два суммирующих усилителя, датчики скорости приводов тяги и подъема, подключенные ко входу пер, -вого суммирующего усилителя, блок деления и блок дифференцирования, снабжено источником постоянного напряжения, блоком воздействия в степень, двумя диодами, двумя компараторами, логическим элементом И, управляемь1м ключом, причём выходы датчиков усилий в тяговом и подъемном канатах подключены соответственно ко входам делимого и делителя блока деления,, выход которого подключен ко входу первого суммирующего усилителя через блок возведения в степень и ко входу второго суммирующего усилителя непосредственно и через блок дифференцирования, ко входам указанных суммирующих усилителей подключен также выход источника постоянного напряжения, а выход каждого из них соответственно через первый и второй диоды и через управляемый ключ подключен ко входу блока привода тяги, управляющий вход управляемого ключа соединен с выходом логического элемента И, входы которого соединены с выходами двух компараторов, два входа первого из которЬ1Х соединены с выходами датчиков усилий в тяговом и подъемном канатах, а два входа второго компаратора соединены с выходами датчика усилия в подъемном канате и источника постоянного напряжения.
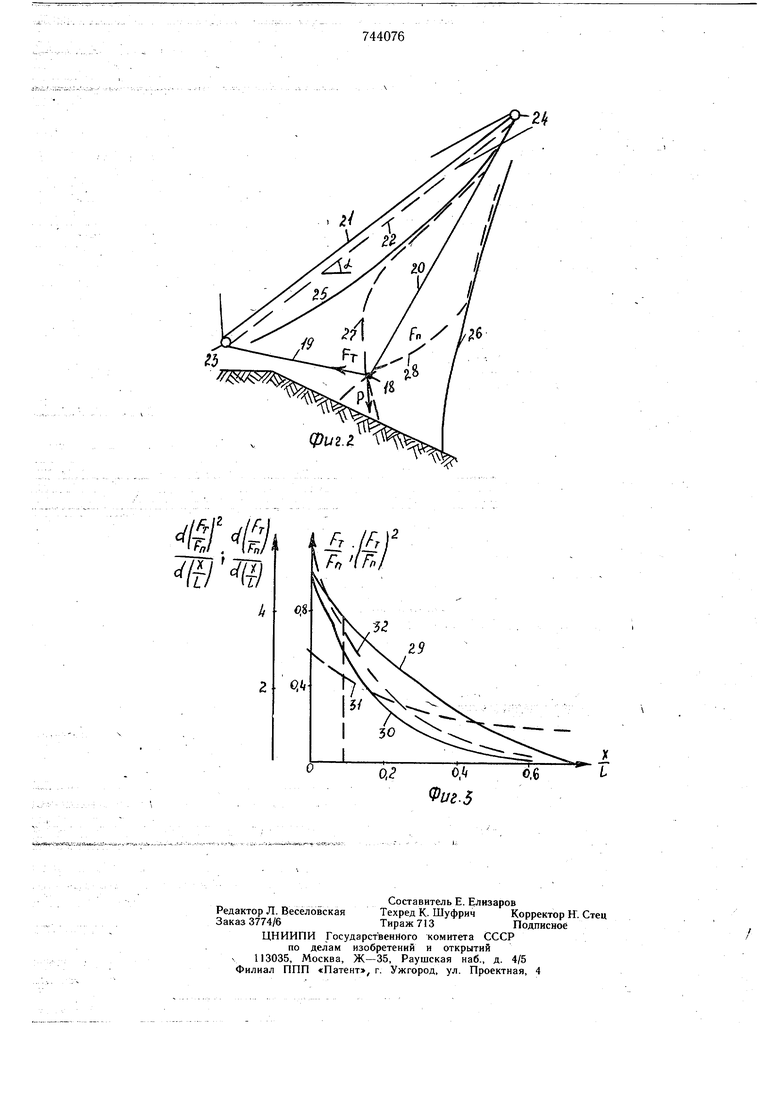
На фиг. 1 приведена блок-схема устройства, реализующего способ; на фиг. 2 - обеспечиваемые предложенные способом границы рабочей зоны транспортировки ковша относительно стрелы и траектории движения ковща; на фиг. 3 - графики зависимостей отношения усилий в тяговом и подъемном канатах, квадрата указанного отношения и крутизны изменения этих величин в зависимости от отношения расстояния ковща от стрелы к длине стрелы у ее середины.
Устройства для осуществления способа содержит источник 1 постоянного напряжения, датчики 2 и 3 усилий Ff и Fn в тяговом и подъемном канатах, два суммирующих усилителя 4 и 5, датчик 6 скорости привода тяги и датчик 7 скорости привода подъема, блок 8 деления, блок 9 дифференцирования, блок 10 возведения в степень, два диода 1Г1Г12, два компаратора 13 и 14, логический элемент 15 И, управляемый ключ 16, блок 17 привода тяги, причем выходы датчиков 2 и 3 усилий в тяговом и в подъемном канатах подключены ко входам соответственно делимого и делителя блока 8 деления, выход которого подключен ко входу первого суммирующего усилителя 4 через блок 10 возведения в степень и ко входу второго суммирующего усилителя 5 непосредственно и через блок 9 дифференцирования, ко входам указанных суммирующих усилителей 4 и 5 подключен также выход источника 1 постоянного напряжения, а выход каждого из них через первый 11 и второй 12 диоды и через управляемый ключ 16 соответственно подключен ко входу блока 17 привода тяги, управляющий вход управляемого ключа 16 соединен с выходом логического элемента 15 И, входы которого соединены с выходами двух компараторов 13 и 14. Два входа первого компаратора 13 соединены с выходами датчиков 2 и 3 усилий в тяговом и подъемном канатах, а два входа второго компаратора 14 соединены с выходами датчика 3 усилия в подъемном канате и источника 1 постоянного напряжения.
Устройство работает следующим образом.
Выходные сигналы датчиков 2 и 3 усилий F-гИ F в тяговом и подъемном канатах подают на выходы делимого и делителя блока 8 деления, выходной сигна которого, пропорциональньш.. отношению j этих усилий, подают на вход первого суммирующего усилителя 14®через блок 10 возведения в степень и на вход второго суммирующего усилителя 5 непосредственно через блок 9 дифференцирования.
На входь из суммирующих усилителей с выхода источника 1 постоянного напряжения поступают сигналы, соответствующие верхней и нижней границам указанного диапазона значений отношения усилий. Суммирующие усилители 4 и 5 осуществляют сравнение отношения усилий в канатах с диапазоном его зна чений, соответствуюшим наложению ковша в рабочей зоне. При появлении положительного отклонения от этого диапазона с выхода первого суммирующего усилителя 4 через первый диод 11 и через управляемый ключ 16, который всегда открыт в процессе транспортировки ковша на вход блока 17 привода тяги поступает сигнал защиты, прекращающий приближение ковша к стреле и тем самым исключающий возможность удара по стреле.
Аналогично при появлении отрицательного отклонения отнощений усилий от указанного диапазона его значений с выхода второго суммирующего усилителя 5 через второй диод 12 и через управляемый ключ 16 на вход блока 17 привода тяги поступает сигнал защиты противоположного знака, прекращающий удаление ковша от стрелы и исключаюший его выход в зону саморазгрузки.
Поступающие на вход первого суммирующего усилителя 4 сигналы с выходов датчиков 6 и 7 скоростей приводов подъема и тяги обеспечивают регулирование установки защиты от удара ковша по стреле пропорционально алгебраической сумме скоростей приводов, что исключает перерегулирование и колебательность переходного процесса.
Аналогичную задачу для режима зашиты от саморазгрузки выполняет введение на вход второго суммируюшего усилителя 5 сигнала производной , поступающего с выхода блока 9 дифференцирования.
Включение блока 10 возведения в степень между выходом блока 8 деления и входом первого суммирующего усилителя 4 обеспечивает увеличение надежности защиты от ударов ковща по стреле за счет увеличения крутизны изменения входного сигнала первого суммирующего усилителя 4 с уменьшением расстояния ковша от стрелы.
На фиг. 2 показаны границы рабочей зоны транспортировки ковша относительно стрелы и траектории движения ковша при действии защиты, обеспечиваемые предложенным способом.
Поскольку при транспортировке ковша 18 усилие FT в тяговом канате 19 и усилие РП в подъемном канате 20 пропорциональны весу Р ковща при любом положения относительно стрелы 21, отношение этих усилий - не зависит от веса ковша и определяется только координатами положения ковша.
При этом диапазону значений этого отношения
cos а (-)м«к ,
гдеа.- угол между горизонтальной линией и линией 22, соединяющей
точки схода канатов с тяговых 23 и подъемных 24 блоков; ( - минимальное отнощение усилия в тяговом канате к весу ковша, при котором исключается опрокидывание ковша, соответствует положение ковща в зоне между граничными кривыми 25 и 26.
Выбор верхней границы диапазона отношений усилий, равной cos о, определяется тем, что соответствующая ей граничная кривая 25 проходит вдоль всей стрелы 21 от тягового 23 до подъемного 24 блоков на расстоянии, достаточном для обеспечения защиты от удара ковша ко стреле, ив то же время не ограничивает рабочей зоны траектории ковша, что обеспечивает высокую маневренность и производительность драглайна.
Выбор нижней границы диапазона отнощений.усилий, равной (-)мнн обеспечивает ограничение рабочей зоны траекторий ковша граничной кривой 26, которая практически совпадает с границей зоны само разгрузки.
В процессе транспортировки ковша определяют фактическое отношение усилий в 5 тягов.ом и подъемном канате и сравнивают его с указанным диапазоном его отношения.
Если отношение усилий находится в пределах указанного диапазона, ковш нахоJJ дится в рабочей зоне между граничными кривыми 25 и 26, и опасность возникновения аварийных режимов (удара ковша, по стреле или его саморазгрузки) отсутствует.
Если в результате неправильных действий машиниста или системы автоматического управления ковш приближается к граничной кривой 25 (например, по траектории 27) и возникает опасность удара ковша по стреле, отношение усилий приближается к верхней границе указанного диапазона его значений. При этом с упреждением, оп0ределяемым регулированием уставки защиты пропорционально алгебраической сумме скоростей приводов подъема и тяги и исключающим перерегулирование, на привод тяги подают сигнал защиты, прекращающий приближение ковша к стреле. При возникновении такого режима в процессе подъема ковша возрастает скорость увеличения длины тягового каната 19 до скорости уменьшения длины подъемного каната 20 и ковщ продолжает подниматься вдоль граничной кривой 25.
Аналогично, в случае приближения ковша к граничной кривой 26 (например, по траектории 28), отношение усилия приближается к нижней границе указанного диапазона значений этого отношения. При этом на привод тяги подают сигнал защиты, исключающий выход ковша в зону саморазгрузки. Если при этом осуществляется подъ7ем ковша (длина подъемного каната 20 уменьшилась), то скорость увеличения длины тягового каната 19 снижается и поддерживается такой, что ковш продолжает подниматься вдоль граничной кривой 26. Рассмотренные аварийнь1е режимы могут возникать только в случае, если ковш поднят над грунтом и удерживается тяговым и подъемным канатами. В этом случае усилие в подъемном канате дсегда превышает усилие в тяговом канате и вес порожнего ковша. Поэтому определяют знаки разности меАду усилиями в подъемном канате и в ТЯГОВОМ канате и разности между усилием в пOдъeмнoм канате и постоянным сигналом, соответствующим весу порожнего ковша, и при положител1 ных знаках обеих указанных разностей включают зашиту. - В режиме копания усилие в подъемном канате меньше усилия в тяговом канате, т. е. их разность отрицательна и защита не включена, что исключает ее ложные срабатывания, повышает надежность и производительность драглайна.. При опушенном на грунт ковше усилие в подъемном канате всегда меньше веса порожнего ковша, т. е. их разница отрицательна, поэтому независимо от знака разности усилия в подъемном канате и усилия в тяговом канате, защита отключена. На фиг. 3 показаны графики, поясняющие работу предложенного устройства. Кривые 29 и 30 характеризуют изменение соответственно величин и (|), а кривые 31 и 32 - крутизну изменения этих величин в функции изменения расстояния X от стрелы: d(Vj/PO и - d( d(X/uy Как видно из фиг. 3, в зоне малых расстояний ковша от стрелы, т. е. в зоне защиты от удара ковща по стреле, крутизна изменения величины (Fr/Fn) с уменьше. (Fr/Fp) . нием расстояния ковша от стрелы (кривые 30 и 32) значительно выще, чем крутизна изменения величины (кривые 29 и 31). что увеличивает надежность защитыот удара ковша по стреле. Чем больще показатель степени п, тем больще крутизна изменения величины (FT/FO) и надежность защиты. В то же время в зоне больщих расстояний ковща от стрелы, т. е. б зоне защиты саморазгрузки ковща, крутизна и31менения величины Fj/Fn больще, чем крутизна изменения величины ), поэтому для защиты от саморазгрузки используют первую степень этой величины, и выход блока 8 деления подключен ко входу второго суммирующего усилителя 5 непосредственно. Именно такое включение обеспечивает ...--... , - VC. .,.«----- ::.--.. высокую надежность защиты от самораз. грузки, а также увеличивает точность определения с помощью блока 9 дифференци8рования производной, вводимой для регулирования уставки защиты от саморазгрузки в функции скорости приближения ковша к граничной кривой 26 и исключающей перерегулирование и колебания во время переходного процесса. На входы первого 13 и второго 14 компараторов поступают сигналы, пропорциональные соответственно разности усилий в подъемном и тяговом канатах, с выходов датчиков 3 и 2 и разности усилий в подъемном канате с выхода датчика 3 и веса порожнего крвща с выхода источника 1 постоянного напряжения. При положительных знаках указанных разностей на выходах обоих компараторов появляются сигналы, которые поступают на входы логического элемента 15 И, а появляющийся при этом на его выходе сигнал открывает управляющий ключ 16, т. 6:. включает защиту, которая в случае возникновения опасности удара ковша по стреле или его саморазгрузки исключает эти аварийные режимы в соответствии с описанным выше принципом. В режиме копания или при опущенном на грунт ковще,когда отсутствует опасность возникновения аварийных режимов, отсутствует сигнал на выходе логического элемента 15 И вследствие отсутствия выходного сигнала первого 13 или второго 14 компаратора. При этом заперт управляемый ключ 16, что исключает ложные срабатывания защиты. , Таким образом, предлагаемое изобретеjjj g повышает точность и надежность защиты от ударов ковша по стреле и обеспечивает защиту от саморазгрузки ковша, что повыщает также надежность и производительность драглайна, облегчает работу машиниста и уменьшает его утомляемость. Формула изобретения 1. Способ защиты драглайна от аварийных режимов при транспортировке ковща, заключающийся в том, что определяют отклонение положения ковша от границы рабочей зоны, характеризуемой величинами усилий в тяговом и подъемном канатах, и в функции этого отклонения производят управление приводом, а уставку защиты регулируют пропорционально алгебраической сумме скоростей приводов подъема и тяги, отличающийся тем, что, с целью повышения точности и надежности защиты от удара ковща по стреле и обеспечения защиты от саморазгрузки ковща, определяют отнощение усилий в тяговом и подъемном канатах, сравнивают его со значениями, лежащими в допустимом диапазоне, соответствующем положению ковша в рабочей зоне, и при отклонении этого отношения от допустимого значения подают на привод сигнал защить1. 2.Способ по п. 1, отличающийся тем, что границы допустимого диапазона значений отношения усилий в тяговом и подъемном канатах, соответствующего положению ковша в рабочей зоне, выбирают равным с йдной стороны - косинусу угла между горизонтальной линией и линией, соединяющей точки схода канатов с тяговых и подъемных блоков, а с другой стороны - минимальному отношению усилия в тяговом канате к весу ковша, при котором исключается опрокидывание ковша. 3.Способ по п. 1, отличающийся тем, что определяют знак разности между усилиями в подъемном и в тяговОм канатах и знак разности между сигналом, соответствующим усилию в подъемном канате и пбстоянным сигналом, соответствующим весу порожнего ковша, а при положительных знаках обеих разностей включают защиту. 4.Устройство для осуществления способа по пп. 1-3, содержащее блок привода тяги, датчики усилий в тяговом и подтаемном канатах, два суммирующих усилителя, датчик скорости привода тяги и датчик скорости привода подъема подключенные ко входу первого суммирующего усилителя, блок деления и блок дифференцирования, отличающееся тем, что оно снабжено блоком возведения в степень, двумя диодами, двумя компараторами, источником постоянного напряжения, логическим элементом И, управляемым ключом, причем выходы датчиков усилии в тяговом и подъемйом канатах П5адкЙ10Чё ьг соб йётстe kifM o входам делимого и делителя блока деления, выход KOtopdro подключен ко входу перво- го суммирующего усилителя через блок возведения в степень и ко входу второго суммирующего усилителя непосредственно и через блок дифференцирования, ко входам указанных суммирующих усилителей подключен также йыхбд источника постоянного напряжения, а вьГХЬд каждого из них соответственно через первый и второй диоды и через управляемый ключ подключен ко входу блока привода тяги, управляющий вход управляемого ключа соёдинен с выходом логического элемента И, входы которого соединены с выходами двух компараторов, два входа первого из которых соединены с выходами датчиков усиЛий в тяговом и подъемном канатах,а два входа второго компаратора соединены с выходами датчика усилия в подъемном канате и источника постоянного напряжения. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 186551, кл. Е 02 F 3/48, 1965. 2.- Авторское свидетельство СССР № 504855, кл. Е 02 F 3/48, 1969. 3. Авторское свидетельство СССР № 202281, кл. Е 02 F 3/48, 1966 (прототип).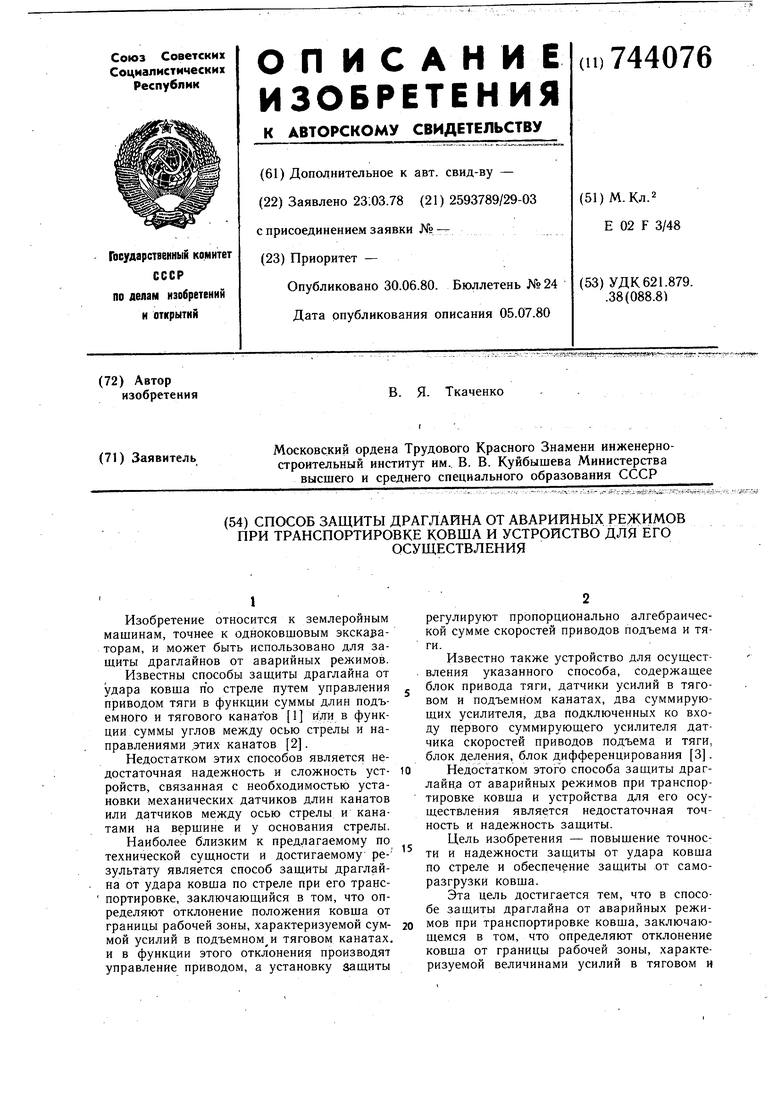

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электрическим приводом тяги драглайна | 1975 |
|
SU717228A1 |
| Способ автоматического управления процессом транспортировки ковша драглайна | 1970 |
|
SU627219A1 |
| СПОСОБ ЗАЩИТЫ ТЯГОВОГО КАНАТА ЭКСКАВАТОРА-ДРАГЛАЙНА ОТ КРИТИЧЕСКИХ НАГРУЗОК И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЗАЩИТА О'АЛЕКС,А) | 1994 |
|
RU2082855C1 |
| Способ управления электрическими приводами драглайна и устройство для его осуществления | 1978 |
|
SU742542A1 |
| Устройство для управления механизмами подъема и тяги драглайна | 1978 |
|
SU874893A1 |
| Экскаватор-драглайн | 1978 |
|
SU746049A2 |
| Способ взаимосвязанного управления электроприводами подъема и тяги драглайна | 1971 |
|
SU771833A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОВША ОТНОСИТЕЛЬНО СТРЕЛЫ И БЛОКОВДРАГЛАЙНА | 1967 |
|
SU195077A1 |
| ЭКСКАВАТОР-ДРАГЛАЙНI 2LQEC111ШШ-'^ЮЗНАЯ^'^лНй^1ЕСКА1 | 1972 |
|
SU338595A1 |
| Устройство защиты стрелы экскаваторадраглайна от растяжки | 1977 |
|
SU737576A1 |