Изобретение относится к автоматизации грузоподъемных машин и может быть использовано для автоматической транспортировки ковша экскаваторадраглайна и защиты стрелы от аварийной растяжки ковша.
Известны устройства управления электроприводами подъема и тяги экскаватора-драглайна, содержащие датчики длин канатов, датчики скоростей и статических нагрузок электроприводов, сумматор, дифференцирующее устройство, блок деления, нелинейный блок и блок сравнения 1 и 2,
Недостатками этих устройств являются несовершенство применяемых методов определения координат ковша, а также сложность самих устройств, что существенно снижает их надежность и качество управления экскаватором,
Известно также устройство управтления электроприводом экскаваторадраглайна, содержащее датчики усилия в опорах головных блоков и блоков наводки и датчики скоростей элекродвигателей приводов подъема и тяги, два сумматора, к первому из которых подключены выходы датчика усилия в опоре головных блоков, а ко второму - выходы датчика усилия в опоре блоков наводки и датчиков скорости электродвигателей подъема и тяги 3.
Недостатком этого устройства является треугольная форма формируемой им границы срабатывания защиты от растяжения ковша, тогда как оптимальная граница достаточно близко описывается дугой окружности а так10же ограниченность В9зможностей устройства, обеспечивающего автоматическую транспортировку ковша только в аварийных ситуациях, В результате не удовлетворяются в достаточной
15 мере требования надежности управления экскаватором.
Цель изобретения - повышение liaдежности управления экскаватором.
20
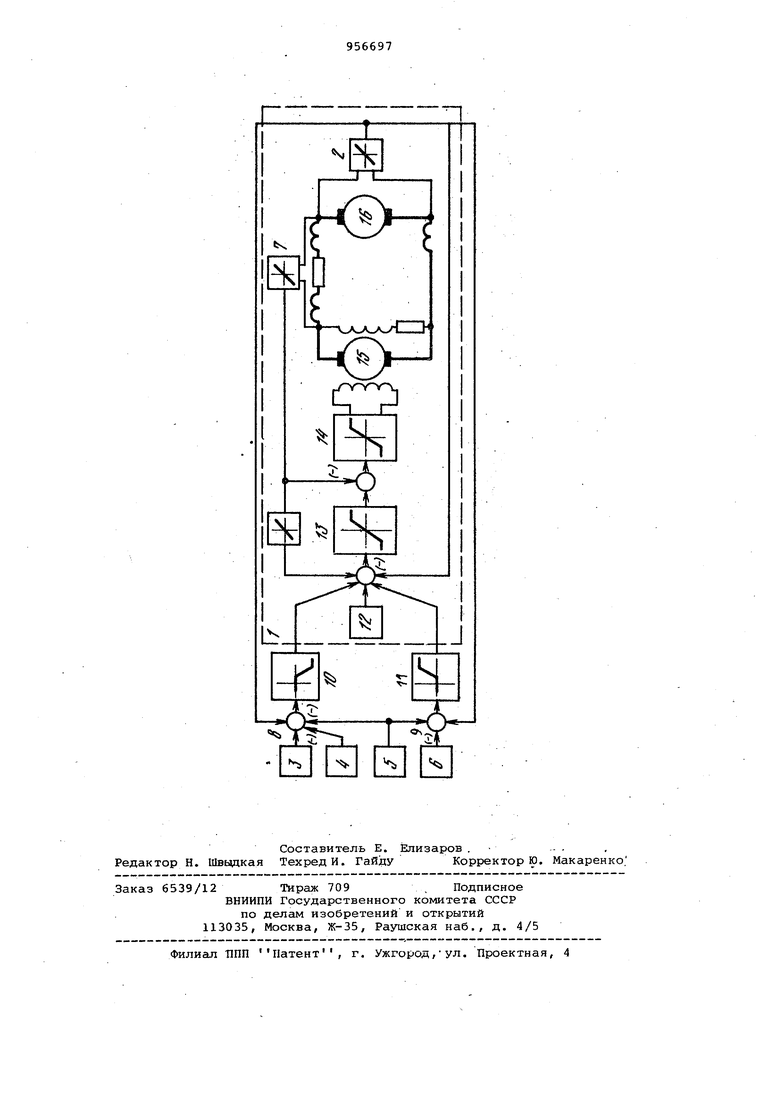
Поставленная цель достигается тем, что устройство снабжено двумя блоками нелинейности с линейной однополярной характеристикой, зоной нечувствительности и ограничением по мо25дулю и датчиком тока якоря электродвигателя подъема, подключенным к первому сумматору, причем выход датчика усилия в опоре головных блоков соединен со входом сумматора, а вы30ход каждого из сумматоров через соответетвукядий блок нелинейности cpeдинен со входом электропривода тяги На чертеже приведена функциональная схема устройства. Устройство управления электроприводом 1 тяги содержит два датчика скорости электродвигателей приводов тяги 2 и подъема 3, два датчика усит ЛИЯ в опорах блоков, наводки 4 и го(Ловных блоков 5, два датчика тока якоря двигателя подъема 6 и тяги 7,два сумматора 8 и 9, два блока 10 И 11 нелинейности, задатчик 12 скороети электродвигателя тяги, регулятор 13 скорости электродвигателя тяги, возбудитель 14 генератора, генератор 15 и двигатель 16 электропривода тяг Электропривод 1 тяги имеет струк туру, в которую входят генератор 15 электродвигатель 16, возбудитель 14 генератора и регулятор 13 скорости, задатчик 12 скорости, датчик 2 скорости в виде датчика напряжения якоря двигателя, датчик 7 тока якорей цепи и необходимые в данной схеме связи по току и напряжению. Возбудитель 14 и регулятор 13 имеют суммирующие входы. Датчики скорости 3 и тока б якоря электродвигателя подъема аналогичны датчикам 2 и 7 тяги. Датчики 4 и 5 измеряют усилия в опорах блоков наводки и .головных, блоков драглайна. На входы сумматора 8 подключены выходы датчиков скорости электродвигателя тяги 2 и подъема 3, усилий в .опорах блоков наводки 4 и головных блоков 5, а выход сумматора 8 через б-лок 10 нелинейности связан, с управляющим входом электропривода 1 тяги. . Датчики скорости 2 электродвигателя тяги, тока 6 якоря электродвигателя подъема и усилия в опорах головных блоков 5 подключены на входы сумматора 9, выход которого через блок 11 нелинейности связан С управляющим входом электропривода 1 тяги. Устройство имеет два канала автоматического управления электропри водом тяги и работает следующим образом. В канале автоматической защиты стрелы от растяжки ковша на сумматоре сигналы с датчиков усилий .в опорах блоков наводки 4 и головных блоков 5 драглайна, содержащие информацию о положении и загрузке ковша, суммируются. Независимости от конструкции направляющих блоков усилия в их опорах определяются зависимостями .() H--SMV°H - Hsi() ( (o-M Тгде РП 1 т натяжения канатов подъема и тяги; g - угол наклона стрелы к плоскости горизонта; V , Ц. - углы между канатами подъема, тяги и стрелой ; п о .о У между канатами подъема, тяги и стрелой, при которых усилия в опорах равны нулю (для выражения 2) ц,., . К-,,,, Кф- коэффициент передачи измерительных устройств; К,- коэффициент, определяемый по геометрическим. - размерам .узла блоков наводки, для гсшовных блоков или для блоков наводки соответственно. При определенном весе,ковша геометрическое место точек его расположения в пространстве, соответствующее постоянству суммарного сигнала усилий Fp g+FgH, описывается дугой окружности, опирающейся на ось стрелы как на хорду, причем при суммарном сигнале, равном нулю, радиус дуги практически не зависит от веса ковша. Настройкой необходимой ширины зоны немувствительности блока 10 нелинейности устанавливается требуемый радиус границы срабатывания защиты от растяжки ковша в -статике. Динамика ковша учитывается алгебраической суммой скоростей электродвигателей приводов подъема и тяги, которая также Выделяется на сумматоре 8 по сигналам с датчиком 2 и 3 скоростей . При приближении ковша к стреле в случае захода его в зону опасной растяжки суммарный сигнал с датчиков 2-5 принимает положительный знак и превышает величину зоны нечувствительности i блока 10 нелинейности, в результате на его выходе появляется сигнал, вызывающий коррекцию работы тяги таким образом, что обеспечивается движение ковша вдоль установленной статической границы зоны защиты. Чем больше скорость движения ковша к стреле, тем дальше чэт стрелы начинается защитное автоматическое управление тягой. Чем легче ковш, тем по более близкой к стреле траектории обеспечивается ег;о транспортировка. В канале эксплуатационного автоматического управления тягой при подъеме койда на выгрузку на сумматор 9 с датчика 5 усилия в опоре головных блоков поступает сигнал, закон изменения которого от F натяжеция подъемных канатов и угла п
между подъемными канатами и стрелой описывается выражением (1). При постоянстве веса ковша геометрическое место точек его расположения в пространстве по своему очертанию достаточно близко соответствует границе зоны саморазгрузки ковша. Настройкой необходимой ширины зоны нечувствительности блока 11 нелинейности для полностью груженого ковша устанавливается граница введения автоматической коррекции управления приводом .тяги, предотвращаемая преждевременную разгрузку ковша и обеспечивающая его подъем вдоль границы саморазгрузки.
Сигнал поступающий с датчика б тока якоря электродвигателя подъема , уменьшает до приемлемого уровня .разброс траекторий подъема, вызванный непостоянством загрузки ковша и, следовательно, его веса. Кроме того, упомянутая связь оказывает стабилизирующее действие, обеспечивая высокое качество управления. Для того чтобы не допустить в динамике выход ковша через границу саморазгрузки и обеспечить плавное управление тягой при минимальных динамических TOKcix, в устройстве используется отрицательная связь по скорости электродвигателя тяги, для чего на сумматор 9 подключен датчик 2 скорости.
При необходимости подъема ковша на выгрузку машинист после отрыва ковша от грунта- устанавливает задатчики скорости электродвигателей подема в крайнее положение На подъем и тяги - в крайнее положение От себя . В результате происходит быстрый вынос ковша к границе его саморазгрузки в зону наименьших натяжений канатов, где суммарный синал с датчиков 5,6 и 2, выделяемый на сумматоре, приобретает положителный знак и становится больше зоны нечувствительности блока 11 нелинейности , на выходе которого, появляется сигнал, вызывающий необходимое притормаживание тяги для. того, что/бы ковш плавно вышел.на границу зоны саморазгрузки и в дальнейшем поднимался вдоль иее. Таким образом автоматический подъем ковша осуществляется при минимуме токов якорных цепей электроприводов подъема и тяги.
Применение изобретения позволяет снизить суммарные потери в якорных
цепях- на 20%, увеличить емкость ковша на 5-7%, сохраняя загрузку электрических машин и механизмов на прежнем уровне и за счет этого на 4-5% поднять производительность экскаватора. Уменьшается вероятность удара ковша по стреле, который приводит к авариям и сопровождается длительными ремонтными простоями (2-6 месяцев) и большими капитальными затратами. В отличие от известных данное устройство обеспечивает автоматизацию подъема и, следовательно, не вызывает увеличения при своем срабатывании времени транспортировки и
в экстренных случаях может исполы зоваться для обхода ковшом препятствий.
.Формула изобретения
20
Устройство управления электроприводом тяги экскаватора-драглайна, (Содержащее датчики усилий в опорах головных блоков и блоков наводки и датчики скорости электродвигателей приводов подъема и тяги, два сумматора, к первому из которых подк.гаоченн выходы датчика усилия в опоре
головных блоков и датчика скорости электродвигателя тяги, а к второму выходы датчика усилия в опоре блоков наводки и датчика скорости электродвигателей подъема и тяги, о т л .и чающееся тем, что, с целью повышения надежности управления, оно снабжено двумя блоками нелинейности с линейной однополярной характеристикой, зоной нечувствительности и ограничением по модулю и датчиком тока якоря эJleктpoдвигaтeля подъема, подключенным к первому сумматору, причем выход датчика усилия в опоре головных блоков соединен с входом сумматора, а выход каждого
из сумматоров через соответст щий блок нелинейности соединен с входом электропривода тяги. «
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 537168, кл. Е 02 F 3/48, 1973. 2. Авторское свидетельство СССР № 504885, кл Е 02 F 3/48, 1972.
3. Авторское свидетельство СССР № 815155, кл. Е 02 F 3/48, 1978 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство защиты стрелы экскаваторадраглайна от растяжки | 1977 |
|
SU737576A1 |
| Способ оптимального управления электроприводами драглайна | 1979 |
|
SU926163A1 |
| Устройство взаимосвязанного управленияэлЕКТРОпРиВОдАМи пОд'ЕМА и ТягиэКСКАВАТОРА-дРАглАйНА | 1978 |
|
SU815155A1 |
| Устройство защиты стрелы от растяжки ковша экскаватора-драглайна | 1977 |
|
SU777157A1 |
| Способ защиты стрелы экскаваторадраглайна | 1977 |
|
SU717239A1 |
| Способ управления электрическим проводом тяги драглайна | 1976 |
|
SU703630A1 |
| Устройство управления процессом транспортирования ковша драглайна | 1988 |
|
SU1544898A1 |
| Устройство для защиты стрелы экскаватора-драглайна | 1983 |
|
SU1194972A2 |
| Способ автоматического управления процессом транспортировки ковша драглайна | 1970 |
|
SU627219A1 |
| Способ защиты драглайна от аварийных режимов при транспортировке ковша и устройство для его осуществления | 1978 |
|
SU744076A1 |