I
Изобретение относится к автоматизации горных МИШИН, а именно, к области управления экскаваторами-драглайнами.
Известно устройство для определения отклонения ковша драглайна от вертикальной плоскости, содержащее датчик длины подъемного каната и установленные на стреле механические датчики углов отклонения механические датчики углов отклонения подъемного каната, соединенные с двумя синусно-косинусными трансформаторами, ко входам которых подключен выход датчика длины подъемного каната, а выходы подключены к схеме деления с показывающим прибором на выходе, а также датчик удаления головы стрелы от оси вращения экскаватора, подключенный ко входу блока суммирования, включенного между выходом одного из синусно-косинусных тр.ансформато: ров и входом схемы деления 1.
Недостатком этого известного устройства является его сложность определяемая прежде всего необходимостью установки на стреле механических датчиков углов отклонения подъемного каната и связанных с ним синусно-косинусных трансформаторов, что усложняет конструкцию устройства
Наиболее близким к предложенному по технической сущности и по достигаемому результату является устройство для определения расстояния ковша драглайна от вертикальной плоскости стрелы, включающее источник постоянного напряжения, датчики скорости и ускорения поворотной платформы, датчики длин подъемного и тягового канатов и подключенную к их выходам схему вычисления угла отклонения ковша от вертикальной плоскости, выполненную на девяти нелинейных функциональных преобразователях и девяти линейных суммирующих, интегрирующих и дифференцирующих усилителях |2j.
Недостатком этого устройства является его сложность, которая отрицательно сказывается также на точности и надежности измерения. Кроме того, это устройство иймеряет угловое отклонение ковша от вертикальной плоскости, а для осуществления по зиционного управления с перемещением ковща в заданную точку пространства; особенно при программном управлении, целесообразно знать расстояние ковша от стрелы, что упрощает решение задачк позиционирования т. к позволяет проще осуществлять сравнение координаты положения ковша с координатами заданной точки перемещения (точки разгрузки ковша или точки начала копания). Между тем, одному и тому же значению углового отклонения ковша, определяемого в известном устройстве, соответствует разное расстояние ковша от вертикальной плоскости стрелы, а следовательно и разное положение ковша в пространстве, в зависимости от расстояния ковша от оси стрелы что требует дополнительного пересчета для определения его фактического положения.
Цель изобретения - упрощение устройства для оп|эеделения расстояния ковща драглайна от вертикальной плоскости стрелы.
Эта цель достигается тем, что устройство снабжено датчиками нагрузок механизмов поворота и подъема и двумя блоками перемножения-деления, ко входу деления одного из которых подключен датчик нагрузки, механизма подъема, а к двум входам перемножения датчик нагрузки механизма поворота и выход второго блока перемноженияделения, подключенного входами перемножения к датчикам длин подъемного и тягового канатов, а входом делителя к выходу суммирующего усилителя, входы которого соединены с датчиком длины тягового каната и с источником постоянного напряжения.
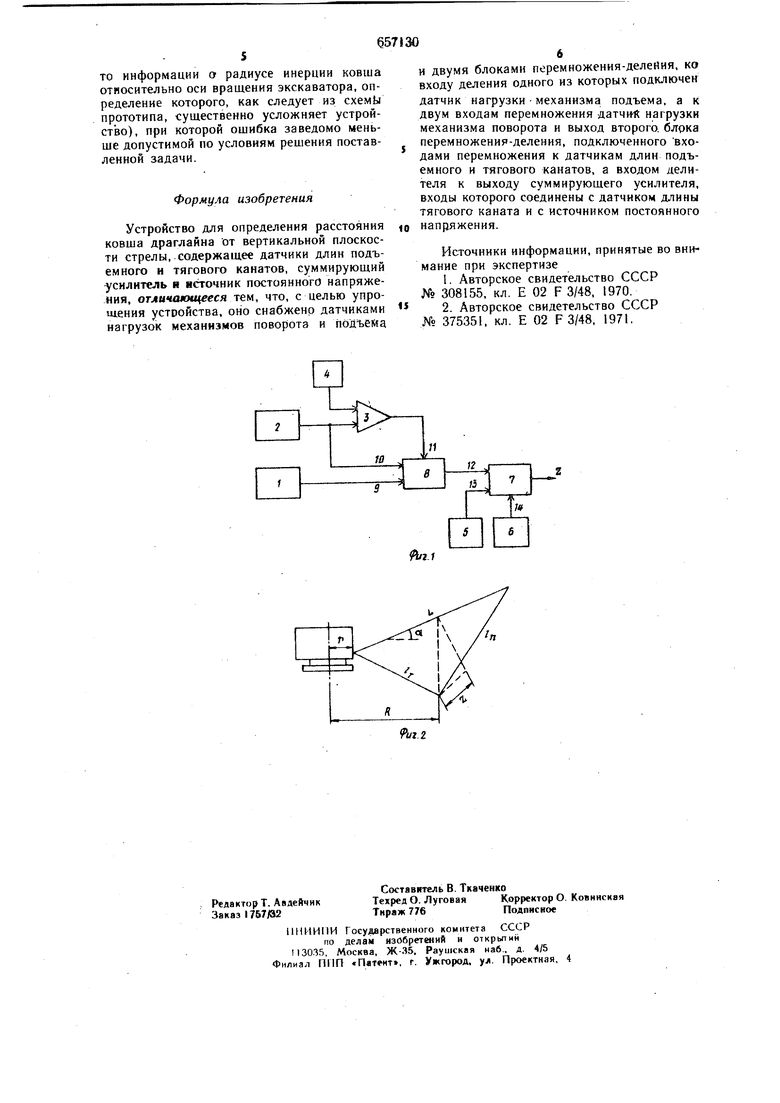
На фиг. 1 схема предложенного устройства,, на фиг. 2 - положение ковша относительно вертикальной плоскостиострелы и параметры, необходимые для определения расстояния ковша от вертикальной плоскости.
Устройство содержит датчики длин подъемного 1 и тягового 2 канатов,- .суммирующий усилитель 3, источник постоянного напряжения 4. УЬтройство дополнительно снабжено датчиками нагрузок механизмов поворота 5 и подъема 6 (могут быть выполнены, например, на основе выделения статических токов двигателей этих механизмов) и двумя блоками перемножения-деления 7 и 8.
Выходы датчиков длин подъемного I (йц) и тягового 2 (т) Канатов подключены ко входам перемножения 9 и 10 блока перемножения-деления 8, ко входу 11 деления которого подключен выход суммирующего усилителя 3, входы которого соединены с вы.ходами Датчика 2 длины тягового каната и источника постоянного напряжения 4, выходНой сигнал которого пропорционален минимальному значению г радиуса инерции R ковша относительно оси вращения экскаватора.
Входы перемножения 12 и 13 первого блока перемножения-деления 7 подключены к выходам второго блока перемноженияделения 8 и датчик.а 5.нагрузки механизма поворота, а вход 14 делителя этого блока подключен к выходу датчика 6 нагрузки механизма подъема.
Работает устройство следующим обра аом.
Напряжение на выходе суммирующего усилителя 3 пропорционально величине (Ет + г), на выходе блока перемноженияделения 8 формируется сигнал, пропорциональный величине fe. з выходной сигнал блока перемножения-деления 7 пропорционален расстоянию Z ковша от вертикальной плоскости стрелы, определяемому здесь из .выражения:
.
где Мп - момент нагрузки механизма певорота,
FP - нагрузочная сила механизма подъема,L, а - соответственно длина стрелы и угол ее наклона к горизонту.
Указанное выражение используемое .в предложенном устройстве для определения расстояния ковша от вертикальной плоскости стрелы, является приближенным, поскольку в нем используется отношение - вместо отношения- , требуемого при строгом подходе к -определению этого расстояния. Однако такая замена, позволяющая исключить необходимость определения радиуса R
инерции ковша относительно оси вращения экскаватора и тем самым упростить устройство, вполне допустима, поскольку при горизонтальном направлении тягового каната
она не приводит к появлению ошибки, а при отклонении тягового каната от горн зонтального направления хотя и появляется ошибка, но при ВОЗМ.ОЖНЫХ для экскаватора положениях ковша она невелика. Так, при максимальном радиусе инерции ковша относительная ошибка не превышает ,°/о,
а по мере уменьшения радиуса инерции хотя и может, возрасти до 4-5%, что тоже вполие допустимо, однако абсолютная ошибка определения величины Z при этом не только не возрастает, а даже уменьшается вследствие более быстрого (по сравнению с ростом относительной .ошибки ) уменьшения абсолютного значения Z (в основном, за счет существенного уменьшения величины Мя). Таким, образом, данное предложение позволяет упростить устройство для определения расстояния ковша от вертикальной плоскости стрелы, поскольку по сравнению с прототипом в нем существенно уменьшено количество .используемых элементов, прежде всего нелннейных преобразователей, большое количество которых всегда существенно затрудняет получение требуемой точности. Возможность такого упрощения по сравнению с прототипом определяется как .использованием другой исходной информации (о нагрузках механизмов поворота и подъёма вместо
информации о скорости и ускорении механизма поворота), так и частичной заменой переменных (использование уже имеющейся информации о длине тягового каната вмес
то информации о радиусе инерции ковша относительно оси вращения экскаватора, определение которого, как следует из схемЫ прототипа, существенно усложняет устройство), при которой ошибка заведомо меньше допустимой по условиям решения поставленной задачи.
Формула изобретения
Устройство для определения расстояния ковша драглайна от вертикальной плоскости стрелы, содержащее датчики длин подъемного и тягового канатов, суммирующий усилитель н источник постоянного напряжения, отличаюи еся тем, что, с целью упрощения устройства, оно снабжено датчиками нагрузок механизмов поворота и подъенц
и двумя блоками перемножения-делейия, ко входу деления одного из которых подключен датчик нагрузки механизма подъема, а к двум входам перемножения датч№й нагрузки механизма поворота и выход второго, блока перемножения-деления, подключенного входами перемножения к датчикам длин подъемного н тягового канатов, а входом делителя к выходу суммирующего усилителя, входы которого соединены с датчиком длины тягового каната и с источником постоянного напряжения.
Источники информации, принятые во внимание при экспертизе
I. Авторское свидетельство СССР № 308155, кл. Е 02 F 3/48, 1970. 2. Авторское свидетельство СССР № 375351, кл. Е 02 F 3/48, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения загрузки ковша драглайна | 1978 |
|
SU747942A1 |
| Устройство для управления поворотом одноковшового экскаватора | 1977 |
|
SU682615A1 |
| Способ учета основных показателей работы экскаватора-драглайна | 1979 |
|
SU1036850A1 |
| Устройство для определения загрузкиКОВшА дРАглАйНА | 1978 |
|
SU812886A1 |
| Способ управления электрическими приводами драглайна и устройство для его осуществления | 1978 |
|
SU742542A1 |
| Способ защиты драглайна от аварийных режимов при транспортировке ковша и устройство для его осуществления | 1978 |
|
SU744076A1 |
| Способ определения положения экскаватора-драглайна в пространстве | 1983 |
|
SU1121356A1 |
| Устройство для управления электрическим приводом тяги драглайна | 1975 |
|
SU717228A1 |
| Способ определения массы ковша экскаватора-драглайна | 1978 |
|
SU861485A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ КОВШАДРАГЛАЙНА | 1971 |
|
SU308155A1 |
