(54) СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оперативного контроля использования экскаватора-драглайна | 1986 |
|
SU1328451A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1985 |
|
SU1263761A2 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1983 |
|
SU1084393A1 |
| Способ измерения количества работы выполненной экскаватором-драглайном | 1982 |
|
SU1097765A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1984 |
|
SU1199868A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Способ оптимального управления электроприводами драглайна | 1979 |
|
SU926163A1 |
| Способ контроля работы экскаватора-драглайна | 1983 |
|
SU1129398A1 |
| Способ определения положения экскаватора-драглайна в пространстве | 1983 |
|
SU1121356A1 |
| Способ оценки качества управления экскаватором-драглайном | 1985 |
|
SU1344868A1 |
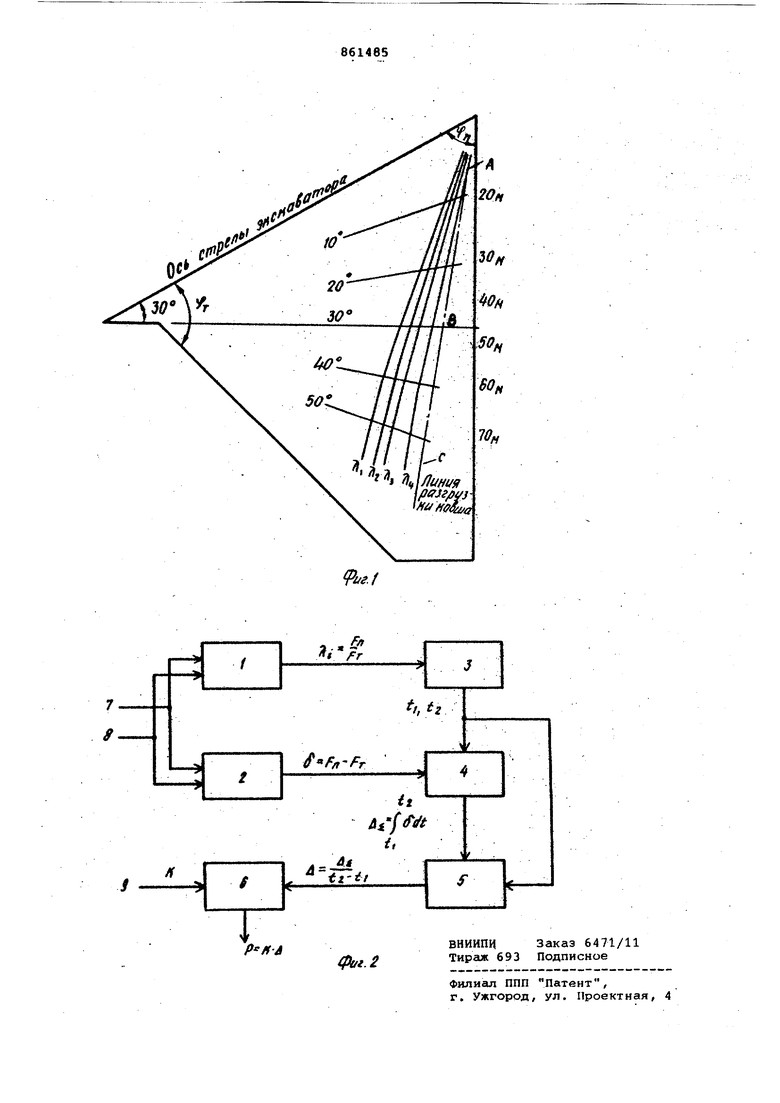
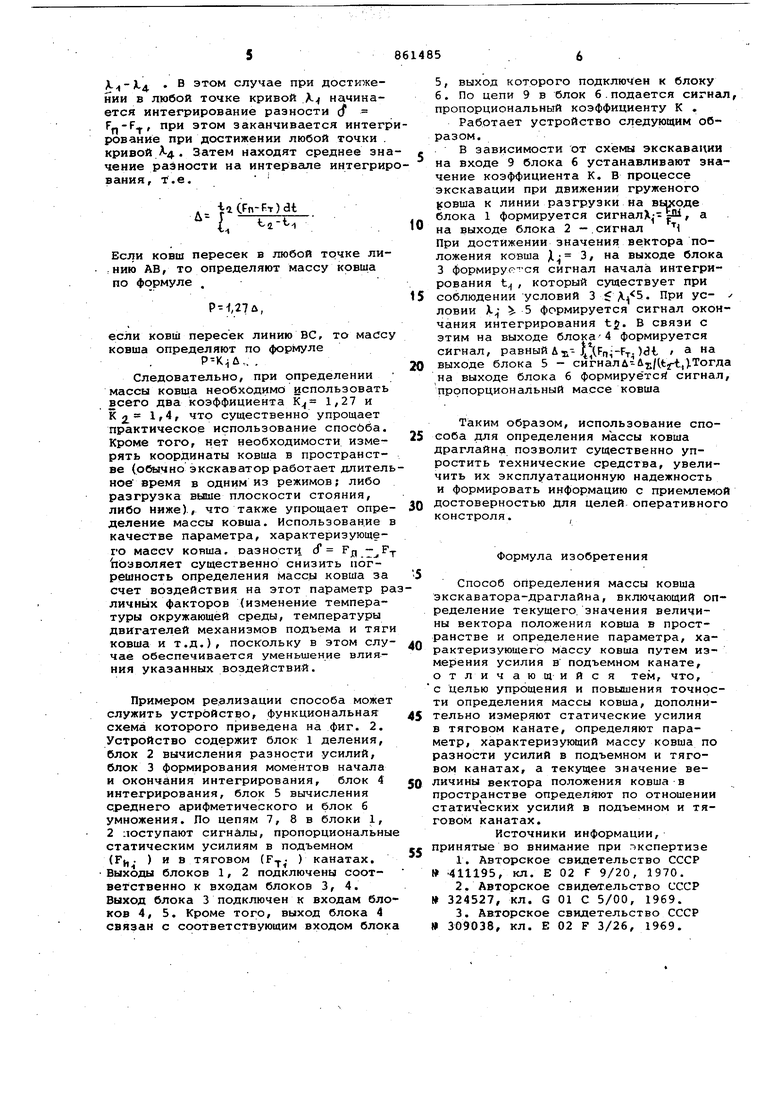
Изобретение относится к области автоматического измерения массы движ щегося ковша экскаватора-драглайна в процессе экскавации и может быть использовано для количественной оценки выполненной .работы при ведении горны и строительных работ, связанных с пе ремещением больших объемов грунта. Известен способ определения массы движущегося ковша драглайна, который предусматривает автоматическое и непрерывное измерение эталонной величины при помощи модели рабочего оборудования экскаватора, следящей за текущими положениями груженого ковша экскаватора. При работе экска-г ватора груз модели экскаватора в каждый текущий момент занимает то же положение, что и груженый ковш экскаватора в пространстве, и создает усилие в подъемном канате, пропорциональное действию массы порожнего ковша экскаватора, воспринимаемое измерителем. Другой измеритель в эти же моменты измеряет усилие в подъемном канате экскаватора, пропор циональное действию массы груженогоковша.При вычитании выходных си1;налов измерителей получают усилие в подъемном канате, пропорциональное действию массы материала, транспортируемого ковшом экскаватора или любом положении его в пространстве. Полученное усилие сравнивают с усилием в подъемном канате модели, пропорциональном массе уже известного . груза,, и по соотношению этих усилий определяют массу материала, транспортируемую ковшом экскаватора 1. Основные недостатки рассмотренного способа заключаются в сложности (требуется динамическая модель рабочего оборудования экскаватора) и значительной погрешности из-за отсутствия полного соответствия между моделью рабочего оборудования и самим оборудованием, и как следствие, сложности низкая надежность при аппаратурной реализации способа. Известен способ, ijoTopbffl предусматривает следующие операции: непрерывно измеряются усилие в подъемном канате и длины тягового и подъемного канатов, длины канатов суммируются и сравниваются с вычисленными заранее величинами 2 . Если 1в результате сравнения выясняется, что ковш находится в определенной зоне, ограниченной дугами эллипсов с центрами в точках входа тягового и подъемного. .канатов с направляющих шкивов и дугами окружностей с центрами в тех же точках, то выбирается соответствуюгций этой области заранее вычисленный коэффициент пропорциональности и вычисляется масса ковша путем перемножения усилия в подъемном канате на указанный коэффициент. Недостатками этого способа являют ся сложность (необходимость измерять длины тягового и .подъемного канатов) неудобство практического использования (канаты часто меняются по длине, что требует перестройки аппаратуры), /недостаточная надежность и связанная с последней значительная погрешность взвешивания (при измерении длин кана тов требуется периодическая проверка начальных точек отсчета длин канатов для корректировки случайных и систематических ошибок датчиков длин канатов) . Наиболее близким техническим решением является способ определения массы ковша экскаватора-драглайна, включающий определение текущего значения величины вектора положения ков ша в пространстве и определение параметра, характеризующего массу ковша путем изменения усилия в подъемном канате 3. Сущность извес ного способа состоит в следующем: при перемещении ковша по любой траек тории в процессе экскавации определя ют вектор положения ковша в прост ранстве (например, значение суммы, длин свисающих частей подъемного и тягового канатов), измеряют параметр Q, характеризующий массу ковша ( в данном случае усилие Fp в подъемном канате), сравнивают текущее значение вектора Х положения ковша с заранее вычисленным его возможньлм значением для определенной области пространства, которые описываются множествгини WM jmivi f . /X-jwanj где j 1, | , определяют моменты начала t и окончания ta интегрирования параметров е M,j; t 2 - при Q; t. при находят интеграл параметра Q.:Q5i -Todt, находят среднее значение парАметра Q на интервале интегрировани определяют массу ковша Р путем умножения величины Q на коэффициент К; , вычисленный для каждой области пространства. Однако этот способ имеет ряд недостатков: во-первых, требуется задавать несколько множеств М- для определения соответствующего числа фиксированных областей пространства с тем, чтобы любая траектория движения ковша пересекла хотя бы одну из них, а это усложняет; практическое использование способа; во-вторых для определения массы ковша необходимо измерять координаты его положения в пространстве, например, по длинам свисающих частей подъемного и тягового канатов; в-третьих, определение массы ковша по статическому усилию в подъемном канате сопряжено с существенной погрешностью, .возникающей ,по причине изменений РП флуктуационного характера и за счет воздействий на экскаватор различных факторов (температура окружающей среды, степень прогрева двигателей механизмов подъема и тяги ковша и т.п.). Целью изобретения является упрощение и повышение точности определения массы ковша. Поставленная цель достигается тем, что дополнительно измеряют статические усилия в тяговом канате, определяют параметр, характеризующий массу ковша по разности усилий в подъемном и тяговом канатах, а текущее значение величины вектора положения ковша в пространстве определяют по отношению статических усилий в подъемном и тяговом канатах. На фиг. 1 приведены кривые постоянных значений вектора положения ковша в пространстве X Ffj/F ; на . 2 - функциональная схема .устройства, реализующего способ. Физическая сущность способа, определяется следующим. Масса ковша может быть вычислена по формуле Р- ) С05(-Чт)-С05() s-th() S - угол наклона стрелы экскаватора к горизонту; угол между подъемным канатом и осью стрелы; %- угол между тяговым канатом и осью стрелы. Задаваясь значениями Чт от 10 до 0 через каждые Ю и значениями тношенияА.,|Р|-,равными 3,0; 3,5; ,0; 5,0, построим линии равных тношений Х.{ const (см. фиг. 1) . аждому значению соответствует мноество значёний, Тогда для наождения массы ковша необходимо разость значений if РП - TT для каой либо точки кривой А умножить на оэффициент К4 для этой же точки. Как следует из фиг. 1, при разгузке ковша в любой точке прямой АВ оэффициент меняется незначит льно,. его среднее значение равно ,27. сли ковш при разгруг)ке пересекает трезок то среднее значение коэфициента К2 1,4. Таким образом, ри разгрузке ковш обязательно долен пересечь а любой точке прямую С, следовательно до этого момента овш обязательно пересечет кривые .В этом случае при достижении в любой точке кривой Л начинается интегрирование разности cf Fp-F, при этом заканчивается интегр рование при достижении любой точки . кривой 4 . Затем находят среднее зн чение разности на интервале интегри вания, т.е. . -taCFnrfOdt - -трг7 Если ковш пересек в любой точке ли:Нию АВ, то определяют массу ковша по фсэрмуле . Р--(,27й, если ковш пересек линию ВС, то масс ковша определяют по формуле ... Следовательно, при определении массы ковша необходимо использовать всего два коэффициента К 1,27 и К 2 If 4, что существенно упрощает практическое использование спосбба. Кроме того, нет необходимости измерять координаты ковша в пространстве (обычно экскаватор работает длител ное время в одним из режимов; либо разгрузка выше плоскости стояния, либо ниже)., что также упрощает опре деление массы ковша. Использование качестве параметра, характеризующего массу ковша, разности сГ Рд.позволяет существенно снизить погрешность определения Массы ковша за счет воздействия на этот параметр р личных факторов (изменение температуры окружающей среды, температуры двигателей механизмов подъема и тяг ковша и т.д.), поскольку в этом слу чае обеспечивается уменьшение влияния указанных воздействий. Примером реализации способа может служить устройство, функциональная схема которого приведена на фиг. 2. Устройство содержит блок 1 деления, блок 2 вычисления разности усилий, блок 3 формирования моментов начала и окончания интегрирования, блок 4 интегрирования, блок 5 вычисления среднего арифметического и блок б умножения. По цепям 7, 8 в блоки 1, 2 поступают сигналы, пропорциональны статическим усилиям в подъемном (Гц. ) и в тяговом (F. ) канатах. Выходы блоков 1, 2 подключены соответственно к входам блоков 3, 4. Выход блока 3 подключен к входам бло ков 4, 5. Кроме того, выход блока 4 связан с соответствующим входом блок 5,выход которого подключен к блоку 6.По цепи 9 в блок 6.подается сигнал, пропорциональный коэффициенту К . Работает устройство следующим образом. В зависимости от схемы экскавации на входе 9 блока 6 устанавливают значение коэффициента К. В процессе экскавации при движении груженого овша к линии разгрузки на выходе блока 1 формируется сигналХ -- , а на выходе блока 2 - сигнал i При достижении значения вектора положения ковша jl 3, на выходе блока 3 формируется сигнал начала интегрирования t , который существует при соблюдении условий 3 . При условии 5 формируется сигнал окончания интегрирования tj. В связи с этим на выходе блока-4 формируется сигнал, равный Д-ь-j(F(,--FT)dt а на выходе блока 5 - сигналu-uj;Htf,).Тогда на выходе блока 6 формируете сигнал, пропорциональный массе ковша Таким образом, использование способа для определения массы ковша драглайна позволит существенно упростить технические средства, увеличить их эксплуатационную надежность и формировать информацию с приемлемой достоверностью для целей оперативного констроля. Формула изобретения Способ определения массы ковша экскаватора-драглайна, включающий определение текущего, значения величины вектора положения ковша в пространстве и определение параметра, характеризующего массу ковша путем измерения усилия в подъемном канате, отлич ающийс я тем, что, с целью упрощения и повышения точности определения массы ковша, дополнительно измеряют статические усилия в тяговом Канате, определяют параметр, характеризующий массу ковша по разности усилий в подъемном и тяговом канатах, а текущее значение величины вектора положения ковшав пространстве определяют по отношении статических усилий в подъемном и тяговом канатах. Источники информации, принятые во внимание при гэкспертизе 1.Авторское свидетельство СССР 411195, кл. Е 02 F 9/20, 1970. 2.Авторское свидетельство СССР 324527, кл. G 01 С 5/00, 1969. 3.Авторское свидетельство СССР 309038, кл. Е 02 F 3/26, 1969.
