сл
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1991 |
|
SU1815785A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ АСИНХРОННЫХ ЭЛЕКТРОПРИВОДОВ ВОДЯНЫХ НАСОСОВ | 2003 |
|
RU2251206C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕАКТОРОМ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2002 |
|
RU2239223C2 |
| Устройство для управления тиристорным преобразователем частоты | 1986 |
|
SU1573513A1 |
| Асинхронный электропривод | 1989 |
|
SU1617611A1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗАГРУЗКОЙ И ВЕНТИЛЯЦИЕЙ МЕЛЬНИЦЫ | 2015 |
|
RU2618346C2 |
| Устройство управления летучей пилой | 1982 |
|
SU1072991A1 |
| Устройство для регулирования скорости вращения тягового электродвигателя смешанного возбуждения | 1979 |
|
SU895746A1 |
| Регулятор давления жидкости | 1988 |
|
SU1536359A1 |
Изобретение относится к области гидроавтоматики и может быть использовано в установках магистрального гидротранспорта, например, водоугольных суспензий. Целью изобретения является снижение пульсаций давления за счет исключения совпадения фаз нагнетания насосов. В случае, если сигналы датчиков 9, 10 поступают одновременно на входы элемента И 14, последний формирует сигнал на изменение частоты на элементы И 15, 16, которые, в зависимости от управляющих сигналов триггера 17, выдают командный сигнал на уменьшение или увеличение частоты вращения двигателя 1 (2) насоса 7 (8). В блоке 18 происходит интегрирование разности командных сигналов и формирование сигнала регулирования, который через тиристорный регулятор 20 изменяет частоту вращения одного из двигателей 1, 2.
Изобретение относится к гидроавтоматике и может быть использовано в установках магистрального гидротранспорта, например, водоугольных суспензий.
Целью изобретения является снижение пульсаций давления за счет исключения совпадения фаз нагнетания насосов.
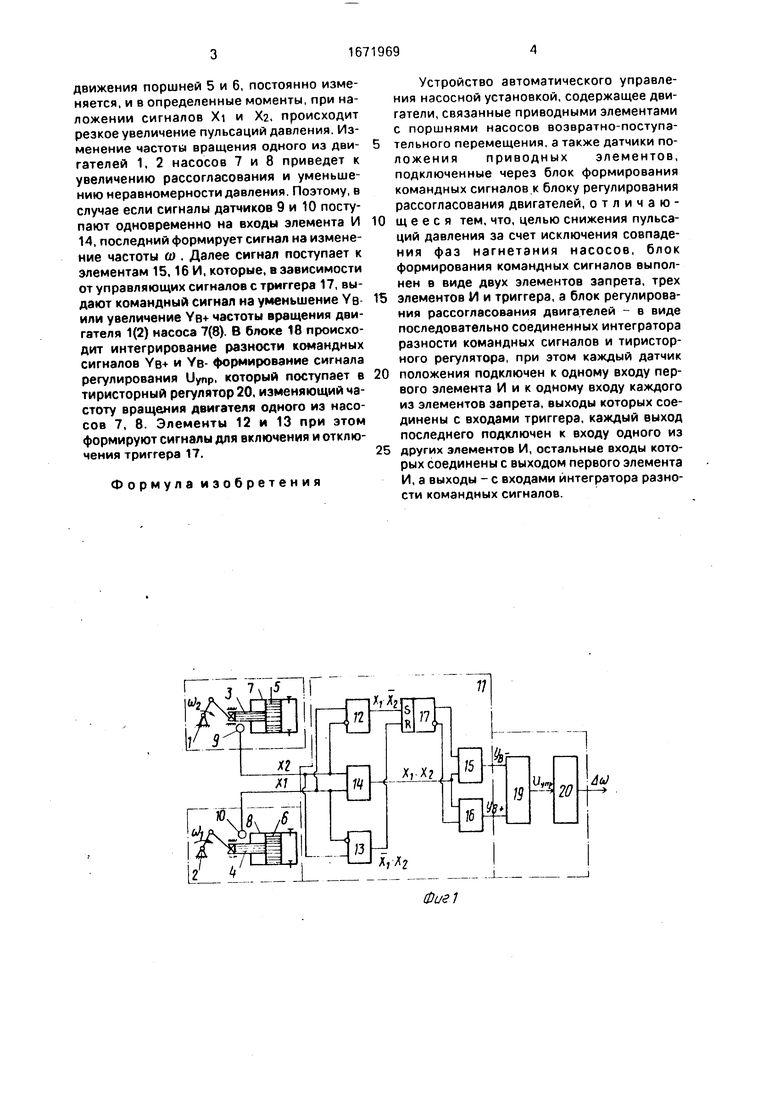
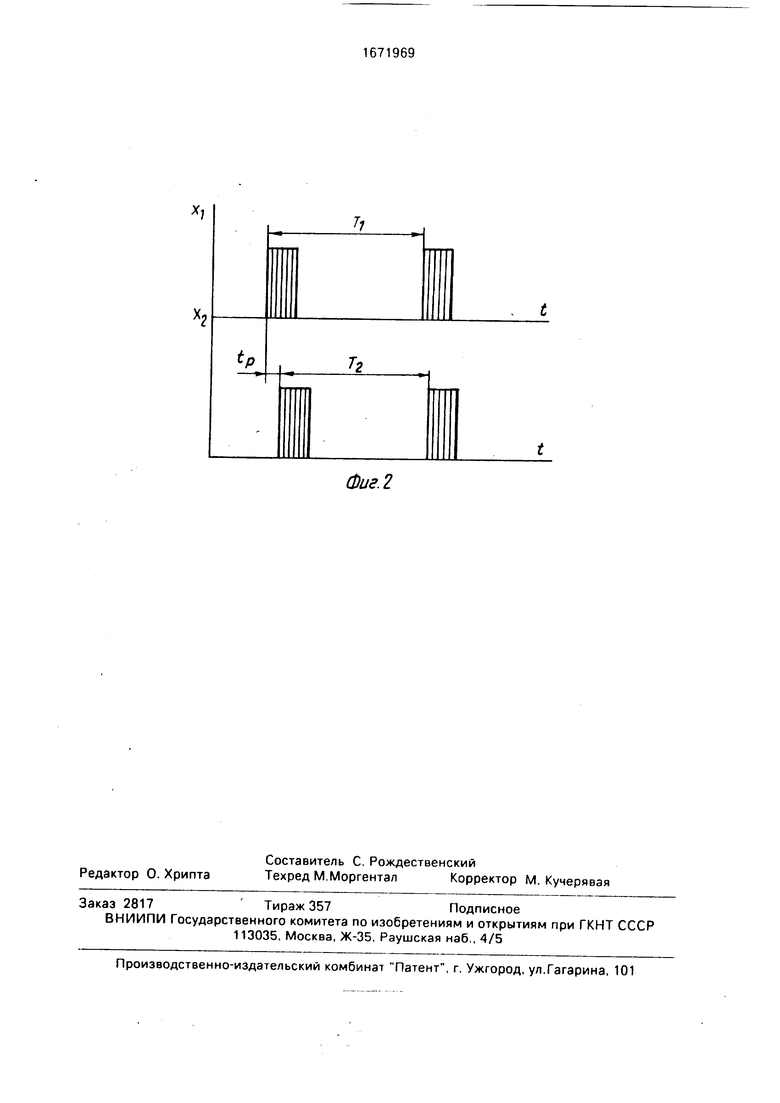
На фиг.1 изображена схема устройства автоматического управления насосной установкой; на фиг.2 - форма импульсных сигналов датчиков положения.
Устройство содержит двигатели 1 и 2, , связанные приводными элементами в виде штоков 3 и 4 с поршнями 5 и 6 насосов 7 и 8 возвратно-поступательного перемещения, датчики 9 и 10 положения штоков 3 и 4, блок 11 формирования командных сигналов в виде элементов 12 и 13 запрета, элементов 14, 15 и 16 И и триггера 17, а также блок 18 регулирования рассогласования двигателей 1, 2 по фазе в виде последовательно соединенных интегратора 19 разности командных сигналов и тиристорного регулятора 20. При этом датчики 9 и 10 подключены к входам первого элемента 14 И и элементов 12 и 13 запрета, выходы которых соединены с входами триггера 17, каждый выход последнего подключен к входу одного из других элементов 15, 16 И, остальные входы которых соединены с выходом элемента И И, а выходы - с входами интегратора 19 разности командных сигналов.
Устройство работает следующим образом.
Датчики 9 и 10 при прохождении поршнями 5 и 6 насосов 7 и 8 (левых крайних по чертежу положений) выдают импульсные сигналы Xi и Х2 (фиг.2). Два параллельно работающих насоса 7 и 8 имеют в общем случае различные частоты вращения . (02. Поэтому время рассогласования tp, соответствующее определенному рассогласованию
а
VI
ч: а ч:
движения поршней 5 и 6, постоянно изменяется, и в определенные моменты, при наложении сигналов Xi и Хг, происходит резкое увеличение пульсаций давления. Изменение частоты вращения одного из двигателей 1, 2 насосов 7 и 8 приведет к увеличению рассогласования и уменьшению неравномерности давления. Поэтому, в случае если сигналы датчиков 9 и 10 поступают одновременно на входы элемента И 14, последний формирует сигнал на изменение частоты ш . Далее сигнал поступает к элементам 15,16 И, которые, в зависимости от управляющих сигналов с триггера 17, выдают командный сигнал на уменьшение Увили увеличение YB+ частоты вращения двигателя 1(2) насоса 7(8). В блоке 18 происходит интегрирование разности командных сигналов YB+ и YB- формирование сигнала регулирования Uynp, который поступает в тиристорный регулятор 20, изменяющий частоту вращения двигателя одного из насосов 7, 8. Элементы 12 и 13 при этом формируют сигналы для включения и отключения триггера 17.
Формула изобретения
Устройство автоматического управления насосной установкой, содержащее двигатели, связанные приводными элементами с поршнями насосов возвратно-поступательного перемещения, а также датчики положения приводных элементов, подключенные через блок формирования командных сигналов к блоку регулирования рассогласования двигателей, отличающ е е с я тем, что, целью снижения пульсаций давления за счет исключения совпадения фаз нагнетания насосов, блок формирования командных сигналов выполнен в виде двух элементов запрета, трех
элементов И и триггера, а блок регулирования рассогласования двигателей - в виде последовательно соединенных интегратора разности командных сигналов и тиристор- ного регулятора, при этом каждый датчик
положения подключен к одному входу первого элемента И и к одному входу каждого из элементов запрета, выходы которых соединены с входами триггера, каждый выход последнего подключен к входу одного из
других элементов И, остальные входы которых соединены с выходом первого элемента И, а выходы - с входами интегратора разности командных сигналов.
fel
20
Аь)
Фиг. 2
| Устройство для автоматического пуска поршневых компрессоров | 1981 |
|
SU992819A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
