Изобретение относится к машиностроению и может быть использовано в робототехнике.
Целью изобретения является повышение функциональных возможностей захвата промышленного робота путем контроля удержания детали и сортировки деталей по диаметру отверстия.
На фиг. 1 показано устройство, общий вид; на фиг. 2 пунктиром показано положение упругого фланца при работе устройства.
Устройство содержит полый корпус 1 с установленными на нем шарнирно захватными рычагами 2. Привод 3 захватных рычагов 2 выполнен в виде мембраны 4 и толкателя 5. Пружина 6 подпружинивает толкатель 5 относительно упора 7, установленного на корпусе 1 с возможностью регулировочного перемещения. Захватные рычаги 2 приводятся в рабочее положение (показано пунктиром на фиг. 1) головкой 8 толкателя 5, с которой они связаны пружинами 9. В корпусе 1 установлены втулка 10 с фланцем, выполненные из упругого материала и снабженные кольцевыми буртиками 11 и калиброванным соплом 12. Кольцевые буртики 11 размещены с зазором в кольцевых пазах 13 корпуса 1, а калиброванное сопло 12 соединяет полость корпуса 1 с его рабочим торцом 14.
Полость корпуса 1 связана с источником 15 сжатого воздуха через регулируемый дроссель 16 и каналом 17 соединяется с измерительным блоком 18. Деталь 19 имеет отверстие 20.
Устройство работает следующим образом.
В исходном положении мембрана 4 находится в нижнем положении, и захватные рычаги 2 разжаты. Канал 17 перекрыт мембраной 4. Регулируемый дроссель 16 позволяет заранее задавать в полости корпуса 1 определенное давление, а регулировка положения упора 7 позволяет варьировать сжатие пружины 6. Источник 15 сжатого воздуха после включения начинает увеличить давление в полости корпуса 1. При этом упругая втулка 10 сдеформируется, плотно прижавшись к поверхности корпуса 1. При достижении в полости корпуса 1 определенного давления мембрана 4 релейно перебрасывается в верхнее положение (показано на фиг. 1 пунктиром) и открывает канал 17. Полость корпуса 1 соединяется с измерительным блоком 18, который формирует
сигнал о срабатывании захватных рычагов 2. Давление в полости корпуса 1 стабилизируется на уровне, определяемом регулируемым дросселем 16 и диметром отверстия 20 детали 19. Уровень давления измеряется измерительным блоком 18, что позволяет определять диаметр отверстия 20. Для открепления детали 19 отключается источник 15 сжатого воздуха, после чего давление в полости корпуса 1 начинает падать. При
определенном уровне давления пружина 6 релейно перебрасывает мембрану 4 в нижнее положение. Мембрана 4 перекрывает канал 17. и измерительный блок 18 формирует сигнал о разжиме захватных рычагов
2.
Формула изобретения
1.Захват, содержащий корпус с полостью, соединенной с источником сжатого воздуха, установленные на корпусе захватные рычаги, снабженные приводом, и размещенное на рабочем торце корпуса калиброванное сопло, отличающийся тем, что, с целью расширения функциональных возможностей, привод выполнен в виде
мембраны, размещенной в полости корпуса, и установленного на мембране с возможностью взаимодействия с захватными рычагами толкателя, при этом полость корпуса связана каналом с дополнительно введенным измерительным блоком, а упомянутый канал имеет возможность перекрытия мембраной, причем источник сжатого воздуха связан с полостью корпуса через дополнительно введенный регулируемый
дроссель.
2.Захват по п.1.отличающийся тем, что, калиброванное сопло размещено в дополнительно введенной втулке с фланцем, выполненной из упругого материала и установленной в полости корпуса соосно с ним, причем на поверхности фланца выполнены кольцевые буртики, размещенные с зазором в ответных кольцевых пазах, выполненных на внутренней поверхности корпуса.
н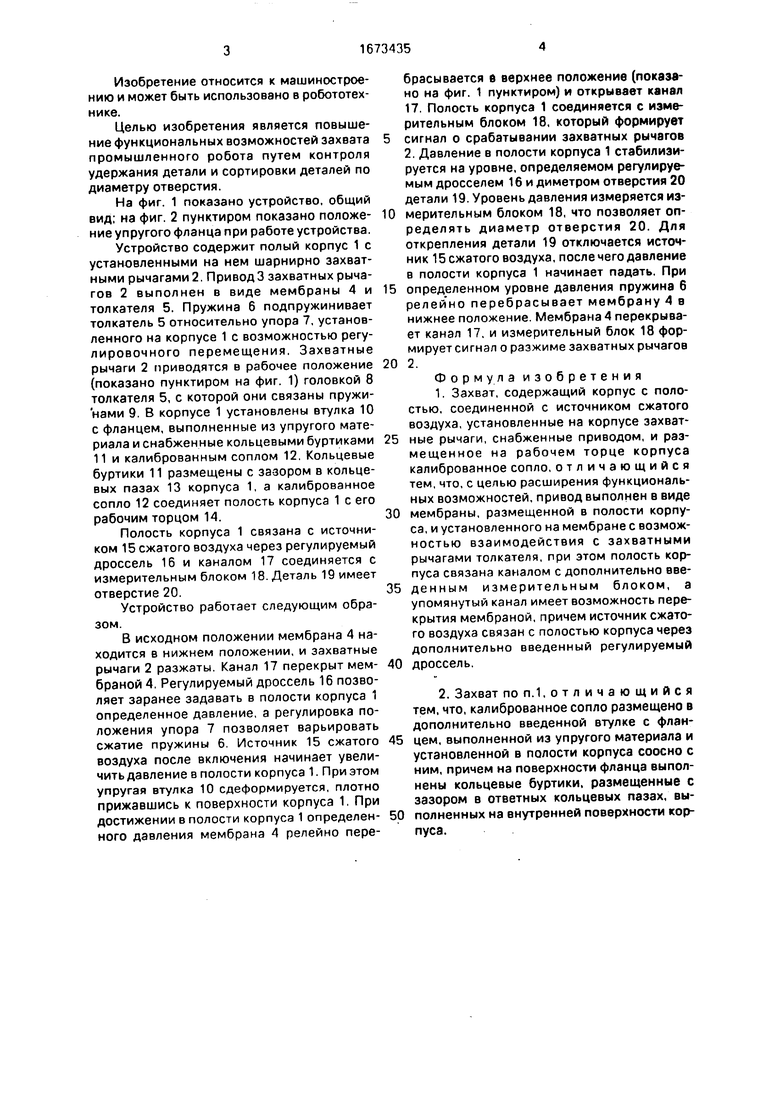
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2141396C1 |
| Захват промышленного робота | 1987 |
|
SU1465308A1 |
| Захватное устройство | 1984 |
|
SU1288046A1 |
| ОЧУВСТВЛЕННЫЙ ВАКУУМНЫЙ ЗАХВАТ | 2005 |
|
RU2283751C1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2002 |
|
RU2228258C2 |
| ГИСТЕРОГРАФ | 1970 |
|
SU260087A1 |
| Пневматический преобразователь | 1984 |
|
SU1167457A1 |
| СИСТЕМА ДОУВЛАЖНЕНИЯ ВОЗДУХА | 2006 |
|
RU2319903C1 |
| Устройство для сборки деталей типа вал-втулка | 1990 |
|
SU1780980A1 |
| СИСТЕМА ДОУВЛАЖНЕНИЯ ВОЗДУХА | 2017 |
|
RU2649737C1 |
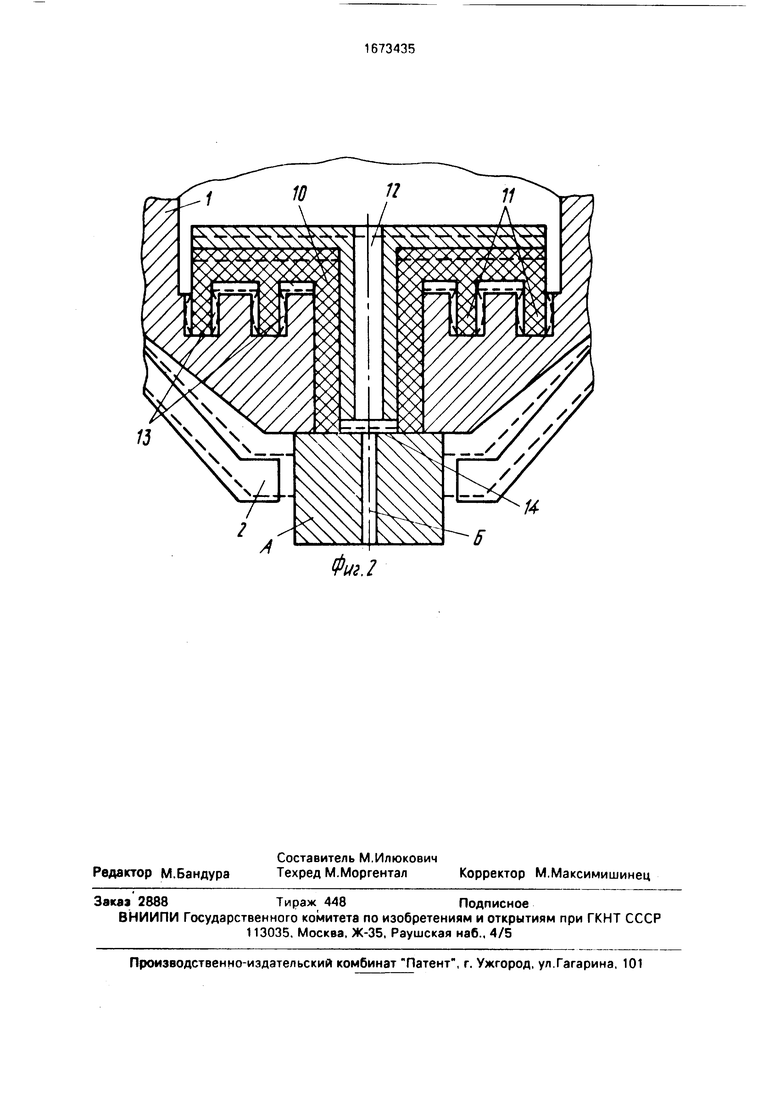
Изобретение относится к робототехнике. Цель изобретения - расширение функциональных возможностей захвата. Устройство содержит полый корпус 1, захватные рычаги 2, мембрану 4 с толкателем 5, упругую втулку 10 с калиброванным соплом 12. Полость корпуса 1 через регулируемый дроссель 16 соединена с источником 15 сжатого воздуха и каналом 17 соединена с измерительным блоком 18. При работе устройства в полости корпуса 1 создается избыточное давление и происходит релейный переброс мембраны 4 в верхнее положение. При этом толкатель 5 своей головкой 8 действует на захватные рычаги 2, зажимающие деталь 19. Канал 17 открывается и измерительный блок 18 выдает сигнал о захвате детали. Воздух из полости корпуса 1 истекает через калиброванное сопло 12 и отверстие 20 детали. Это позволяет по уровню давления определять диаметр отверстия 20. 1 з.п. ф-лы, 2 ил.
| Схват промышленного робота | 1979 |
|
SU781055A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
