Изобретение относится к автоматическому ориентированию деталей различной формы со смещенным центром тяжести и может быть использовано в составе промышленного робота при механообработке и механосборке.
Целью изобретения является расширения технологических возможностей за счет обеспечения удержания и ориентирования устройством деталей различной формы.
На чертеже представлено предлагаемое ю устройство.
Устройство состоит из корпуса 1, в котором размеш.ен, например, мембранный пневмопривод одностороннего действия, шток 2 которого, имеющий регулируемый упор 3 для установления требуемой величины све- дения губок, связан через сухарь 4 с рычажным параллелограммным механизмом. В отверстиях рычагов 5 этого механизма смонтированы с возможностью осевого перемеконцов на величину L/2, где L - длина детали, т.е. в сечении, совпадающим с поперечной плоскостью симметрии. Перед началом сведения рычагов 5 с губками 15 корпуса силовых цилиндров 6 максимально сведены пружинами 8 к центру устройства, плунжер 10 доведен до рифленой поверхности упора 11, а рифленая торцовая поверхность буртика 17 щтока 13 контактирует с внутренней поверхностью крышки 9, что препятствует самопроизвольному провороту губок 15 под действием, например, сил инерции и исключает неправильный захват детали.
После подачи воздуха в штоковую полость пневмопривода в корпусе 1 шток 2, перемещаясь, осуществляет через посредство сухаря 4 сведение рычагов 5 к центру устройства и захват детали. При этом происходит смепхение корпусов силовых цилиндров 6 от центра устройства и деформация
щения силовые цилиндры 6, фиксируемые п пружин 8. Величина перемещения щтока 2
от проворота винтами 7. Сведение силовых цилиндров 6 к центру устройства обеспечивается пружинами 8. Внутри цилиндров 6, закрытых крышками 9, установлены полые плунжеры 10, опирающиеся на регулируемые упоры 11, снабженные рифлями 12, 25 контактирующими с доныщками плунжеров 10, также снабженными рифлями, и фиксирующими их от проворота при раскрытом состоянии захвата. Внутри плунжеров смонтированы с возможностью перемещения в осевом направлении щтоки 13 с пружинами 30 14, на концах которых закреплены губки 15 с двумя пересекающимися под прямы.ми углами призматическими поверхностями под закрепляемую и ориентируемую деталь 16. В средней части щтоков 13 выполнены упорные буртики 17 с нанесенными на 5 обращенной к крыщкам 9 торцовой поверхности рифлями, которые также как и рифли на упоре 11 фиксируют плунжеры 10 и щтоки 13 от проворота при раскрытом захвате. Фиксация щтоков 13 от прово- 40 рота относительно плунжеров 10 осуществляется с помощью штифтов 18, концы которых размещены в прорезях плунжеров. В средней части внутренней поверхности корпусов силовых цилиндров 6 выполнены кольцевые проточки 19 и каналы 20 для 45 подвода сжатого воздуха, а в глубине - отверстия 21, связанные каналом через регулируемый дроссель 22 с атмосферой. Корпус силового цилиндра 6 и плунжер образуют закрытую 23 и открытую 24 полости. Устройство работает следующим образом. Детали, например ступенчатые валики, после первичного ориентирования, например, в вибробункере, поступая в отводной лоток, имеют два различимых положения - проточкой вперед или проточкой назад. Захват деталей осуществляется призматическими губками 15, которые располагают в сечении детали 16, равноудаленном от ее
55
и корпусов силовых цилиндров b задается с помощью винта 3. Таким образо.м, усилие зажима детали 16 обеспечивается за счет энергии упругих деформаций, накопленных в пружинах 8. Смещению силовых цилиндров 6 предществует осевое смещение пггока 13, буртик 17 которого выходит из контакта с крыщкой 9 и входит в контакт с плунжером 10, как это показано на чертеже.
После захвата и извлечения детали 16 из лотка включается подача сжатого воздуха через канал 20 в кольцевую проточку 19, расположенную на расстоянии m к п от концов плунжера 10. Из кольцевой проточки воздух через гарантированный радиальный зазор между наружной поверхностью плунжера 10 и внутренней поверхностью корпуса силового цилиндра 6 попадает в закрытую 23 и открытую 24 полости цилиндра, а из них в атмосфе|)у соответственно через отверстия 2 и отверстия в крышке 9. Воздух, попадающий в полость 23 быстрее, чем в полость 24 за счет разности сопротивлений участков зазора ;;линой m и п (при ), вызывает смещение корпусов силовых цилиндров 6 относите.чьно плунжеров 10 и сжатие пружин 8. Смещение стакана на величину К приводит к открыванию отверстия 21, связывающего полость 23 с атмосферой. Скорость перетечки воздуха регулируется дросселями 22.
В результате истечения воздуха через радиальный зазор между плунжером 10 и поверхностью корпуса силового цилиндра образуется воздушная подушка, т.е. плунжер как бы «всплывает, что уменьшает трение между ним и корпусом силового цилиндра (эффект аэростатической направляющей, аэростатического подщипника).
Открытие отверстия 21 в резу.,)ьтате осевого смещения плунжера приводит к резкому уменьшению давления в полости 23, в результате чего корпус силового цилиндра 6
концов на величину L/2, где L - длина детали, т.е. в сечении, совпадающим с поперечной плоскостью симметрии. Перед началом сведения рычагов 5 с губками 15 корпуса силовых цилиндров 6 максимально сведены пружинами 8 к центру устройства, плунжер 10 доведен до рифленой поверхности упора 11, а рифленая торцовая поверхность буртика 17 щтока 13 контактирует с внутренней поверхностью крышки 9, что препятствует самопроизвольному провороту губок 15 под действием, например, сил инерции и исключает неправильный захват детали.
После подачи воздуха в штоковую полость пневмопривода в корпусе 1 шток 2, перемещаясь, осуществляет через посредство сухаря 4 сведение рычагов 5 к центру устройства и захват детали. При этом происходит смепхение корпусов силовых цилиндров 6 от центра устройства и деформация
5 0 5 0 5
5
и корпусов силовых цилиндров b задается с помощью винта 3. Таким образо.м, усилие зажима детали 16 обеспечивается за счет энергии упругих деформаций, накопленных в пружинах 8. Смещению силовых цилиндров 6 предществует осевое смещение пггока 13, буртик 17 которого выходит из контакта с крыщкой 9 и входит в контакт с плунжером 10, как это показано на чертеже.
После захвата и извлечения детали 16 из лотка включается подача сжатого воздуха через канал 20 в кольцевую проточку 19, расположенную на расстоянии m к п от концов плунжера 10. Из кольцевой проточки воздух через гарантированный радиальный зазор между наружной поверхностью плунжера 10 и внутренней поверхностью корпуса силового цилиндра 6 попадает в закрытую 23 и открытую 24 полости цилиндра, а из них в атмосфе|)у соответственно через отверстия 2 и отверстия в крышке 9. Воздух, попадающий в полость 23 быстрее, чем в полость 24 за счет разности сопротивлений участков зазора ;;линой m и п (при ), вызывает смещение корпусов силовых цилиндров 6 относите.чьно плунжеров 10 и сжатие пружин 8. Смещение стакана на величину К приводит к открыванию отверстия 21, связывающего полость 23 с атмосферой. Скорость перетечки воздуха регулируется дросселями 22.
В результате истечения воздуха через радиальный зазор между плунжером 10 и поверхностью корпуса силового цилиндра образуется воздушная подушка, т.е. плунжер как бы «всплывает, что уменьшает трение между ним и корпусом силового цилиндра (эффект аэростатической направляющей, аэростатического подщипника).
Открытие отверстия 21 в резу.,)ьтате осевого смещения плунжера приводит к резкому уменьшению давления в полости 23, в результате чего корпус силового цилиндра 6
под действием пружины 8 возвращается в исходное положение, отверстие 21 перекрывается, что вновь приводит к возрастанию давления и смещению корпуса цилиндра. Таким образом корпус сил&вого цилиндра 6 со- верщает колебательные движения в осевом направлении относительно плунжера 10 со штоком 13 и рычагов 5, не входя при этом в контакт с упором 11 и крышкой 9, частота которых зависит от скорости истечения возковую полость пневмокамеры корпуса 1, щток под действием пружины перемещается от упора 3 и разводит рычаги 5, освобождая деталь.
Формула изобретения
Захватное устройство, содержащее корпус, захватные рычаги с приводом их перемещения и силовые цилиндры, связанные со
духа через дроссель 22 (пневматический 10 средство.м подачи воздуха, корпуса которых
вибратор по типу пневматического молотка). Колебания (вибрации) корпуса силового цилиндра относительно плунжера приводят к уменьшению момента трения между ними, что способствует быстрому развороту плунжеустановлены на захватных рычагах, а ujTOKii связаны с зажимными губками, отличающееся тем, что, с целью расширения технологических возможностей, корпуса силовых цилиндров установлены на захватных
ра 10 и штока 13 вокруг своей оси за счет рычагах с возможностью осевого перемешесмещенного центра тяжести ориентируемой детали 16 относительно поперечной плоскости симметрии на величину е. В результате разворота деталь располагается проточния без вращения и подпружинены относительно последних, а штоки силовых цилиндров связаны с поршнями, выполненными в виде плунжеров, с возможностью их
кой вверх, как это показано на чертеже, а 20 осевого перемещения без относительного направление действия силы тяжести совпа- дает с осью устройства.
После этого отключается давление, подаваемое в проточку 19, корпус силового цилиндра 6, плунжер 10 и шток 13 возвращаются под действием соответственно пружин 8 и 14 в исходное положение, а угловое положение штока 13 с губками 15 фиксируется рифлеными поверхностями на упоре 11. После установки сориентированной таким об25
вращения и подпружинены относительно этих плунжеров, причем на внутренних стенках крыщек силовых цилиндров выполнены элементы фиксации, предназначенные для взаимодействия с ответными элементами, выполненными на плунжерах и штоках, при этом в средней части внутренней рабочей поверхности силовых цилиндров выполнены кольцевые проточки, связанные каналами со средством подачи воздуха, а участок между поршневой полостью и кольцевой проточкой
разом детали 16 в зону обработки или сбор-связан каналом через дополнительно введенный дроссель с атмосферой.
ки снимается давление, подаваемое в штоковую полость пневмокамеры корпуса 1, щток под действием пружины перемещается от упора 3 и разводит рычаги 5, освобождая деталь.
Формула изобретения
Захватное устройство, содержащее корпус, захватные рычаги с приводом их перемещения и силовые цилиндры, связанные со
установлены на захватных рычагах, а ujTOKii связаны с зажимными губками, отличающееся тем, что, с целью расширения технологических возможностей, корпуса силовых цилиндров установлены на захватных
ния без вращения и подпружинены относительно последних, а штоки силовых цилиндров связаны с поршнями, выполненными в виде плунжеров, с возможностью их
осевого перемещения без относительного
вращения и подпружинены относительно этих плунжеров, причем на внутренних стенках крыщек силовых цилиндров выполнены элементы фиксации, предназначенные для взаимодействия с ответными элементами, выполненными на плунжерах и штоках, при этом в средней части внутренней рабочей поверхности силовых цилиндров выполнены кольцевые проточки, связанные каналами со средством подачи воздуха, а участок между поршневой полостью и кольцевой проточкой
связан каналом через дополни
денный дроссель с атмосферой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для подачи листов к гильотинным ножницам | 1981 |
|
SU1016093A1 |
| Устройство для монтажа и демонтажа валков с подушками | 1980 |
|
SU941152A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Подвесной манипулятор | 1977 |
|
SU733844A1 |
| Захватное устройство | 1988 |
|
SU1521583A1 |
| УКЛАДЧИК | 1973 |
|
SU388983A1 |
| Вакуумный эжекторный захват | 1983 |
|
SU1134521A1 |
| Устройство для обвязки кольцеобразных предметов | 1986 |
|
SU1330012A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Схват робота | 1983 |
|
SU1117205A1 |
Изобретение относится к области .машиностроения и может быть использовано при автоматическом ориентировании деталей в промышленном роботе. Целью изобретения является расширение технологических воз.можностей за счет обеспечения удержания и ориентирования устройством деталей различной формы. Цель изобретения достигается тем, что в захватном устройстве, содержашем корпус 1, захватные рычаги 4, 5 и установленные на них силовые цилиндры 6, 13 которых связаны с зажимными губками, корпусы силовых цилиндров 6 установлены с возможностью осевого перемещения и подпружинены относительно рычагов 5. Кроме т;ого, штоки 13 силовых цилиндров 6 подпружинены относительно поршней и имеют эле.менты фиксации с корпусами силовых цилиндров, внутренняя поверхность которых выполнена с проточкой. Это обеспечивает снижение сил трения между корпусами и поршнями в момент захвата детали и ориентацию летали под действием собственного веса. 1 ил. & 75 (Л N5 00 00 о Ci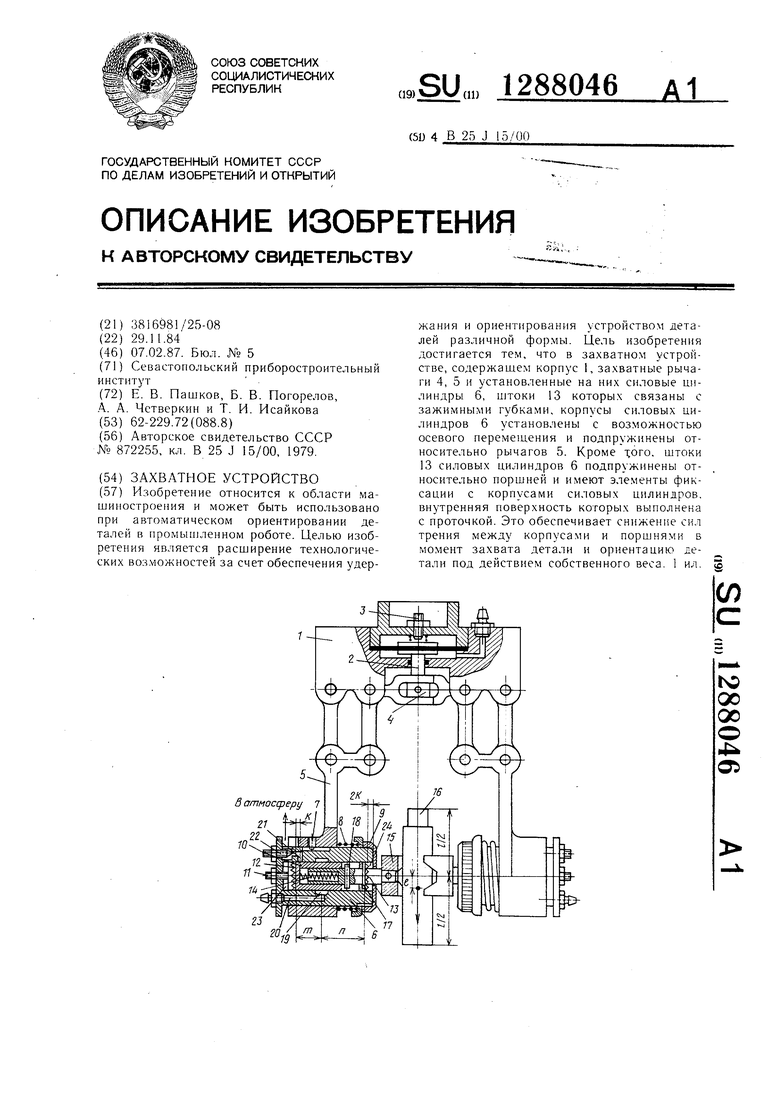
| Адаптивный схват промышленного робота | 1979 |
|
SU872255A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
