(54) СХВАТ ПРО№Ш1ЕИНОГО РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| Схват манипулятора | 1980 |
|
SU973355A1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Схват промышленного робота | 1977 |
|
SU662344A1 |
| Гибкий производственный модуль | 1988 |
|
SU1593915A1 |
| Схват | 1981 |
|
SU952581A1 |
| Схват робота | 1981 |
|
SU994256A1 |
| Схват манипулятора | 1985 |
|
SU1255427A1 |
| Схват робота | 1986 |
|
SU1425080A1 |
1
Изобретение относится к манипуляторостроению и может быть кспользО вано в машиностроительной и прибороптооительной промышленности. . . . . 5
известен схват Нромьшшенного робота, содержащий полые упругие элементы, неподвижно закрепленные на основании, и средство подвода рабочей среды, сбеспечивакадий автоматический jQ зажим детали за счет того, что поверхности упругих элементов, контактируюиие с изделием, снабжены калиброванным соплом l .
Недостатком известного охвата явля ется низкая надежность работы при за- : хвате круглых деталей. Кроме того отсутствует возможность точного базирования деталей и сортировки их. 20
Цель изобретения - обеспечение сортировки круглых деталей.
Цель достигается тем, что он снабжен установленными на основании ограничительными упорами и базирующей 25 призмой, между губками которой по оси охвата установлено калиброванное сопло.
На чертеже изображен схват, общий
вид.30
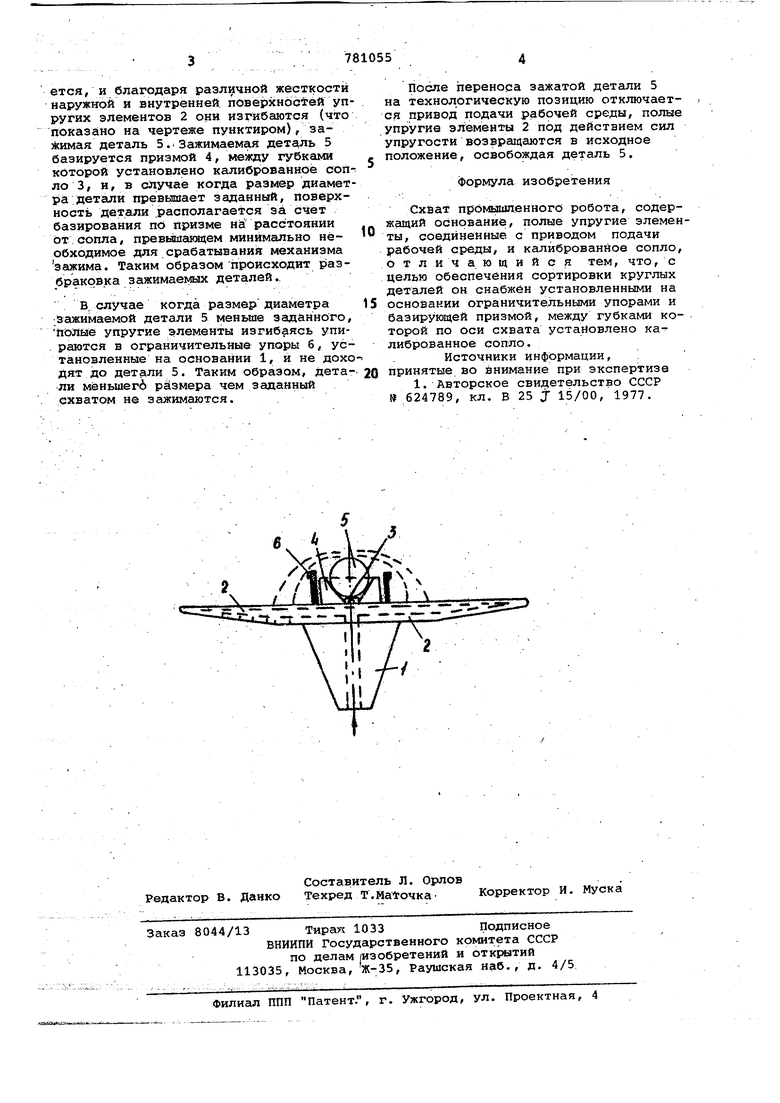
Схват промышленного робота содер-; жйт основание 1, связанные с ним полые упругие элементы 2, наружная сторона которых выполнена более жесткой . нежели внутренняя за счет гофра, соедийенные с приводом ТЮДачи рабочей среды, например сжатого воздуха, и калиброванное сопло 3, установленное по оси схвата. На основании 1 установлена базирующая призма 4, между губками которой расположено калиброванное сопло 3. Схват зажимает деталь 5. На основании 1 установлены ограничительные упоры б, не позволяющие
15 производить зажим детали, размер диаметра которой меньше заданного.
Работает схват промышленного робота следующим образом. В исходном состоянии полые упругие элементы 2 занимают горизонтальное положение. При подходе схвата к загрузочной позиции зажимаемая деталь 5 перекрывает калиброванное сопло 3, установленное по оси схвата. При этом прекра цается (или уменьшается) выход сжатого воздуха через сопло, что происходило в исходном состоянии благодаря соединению полых упругих элементов 2 с приводом подачи рабочей срёды. Давление в полых упругих элементах повьлиается, и благодаря различной жесткости наружной и внутренней поверхностей уп ругих элементов 2 они изгибаются (что показано на чертеже пунктиром)/зажимая деталь 5. Зажимаемая деталь 5 базируется призмой 4, между губками которой установлено калиброванное con no 3, и, в случае когда размер диамет ра детали превышает заданнь1й, поверхность детали .располагается за счет базирования по призме на расстоянии от сопла, превьпаакяцем минимально необходимое для срабатывания механизма зажима. Таким образомпроисходит разбраковка зажимаемых деталей.. В. случае когда размер диаметра зажимаемой детали 5 меньше заданного, Полые упругие элементы изгибаясь упираются в ограничительные упоры б, установленные на основании 1, и не дохо дят до детали 5. Таким образом, детали мёньшегб размера чем заданный схватом не зажимаются. После переноса зажатой детали 5 на технологическую позицию отключается привод подачи .рабочей среды, полые упругие эл;емёнты 2 под действием сил упругости возвращаются в исходное положение, освобождая деталь 5. Формула изобретения Схаат промышленного робота, содержащий основание, полые упругие элементы, соединенные с приводом подачи рабочей среды, и калиброванное сопло, отличающийся тем, что, с целью обеспечения сортировки круглых деталей он снабжен установленными на основании ограничительными упорами и базирующей призмой, между губками которой по оси схвата устайовлено калиброванное сопло. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 624789, кл. В 25 J 15/00, 1977.
