Изобретение относится к технологии полупроводников, в частности к технология выращивания полупроводниковых гетеро- структур методом жидкофазной эпитаксии, и может быть использовано для получения квантово-размерных периодических структур с супертонкими активными слоями с целью создания на их основе, например, температурно-стабильных лазеоов. быстродействующих транзисторов и т.д.
Цель изобретения - получение эпитак- сиальных слоев субмикронной толщины и увеличение их однородности
На фиг. 1 приведена схема установки; на фиг.2 - блок-схема устройства задания (за- датчика) скорости движения; на фиг.З - захват штока; на фиг 4 - вакуумное уплотнение с электромагнитным клапаном; на фиг.5- кривая дифракционного отражения структуры; на фиг.6 - скол структуры.
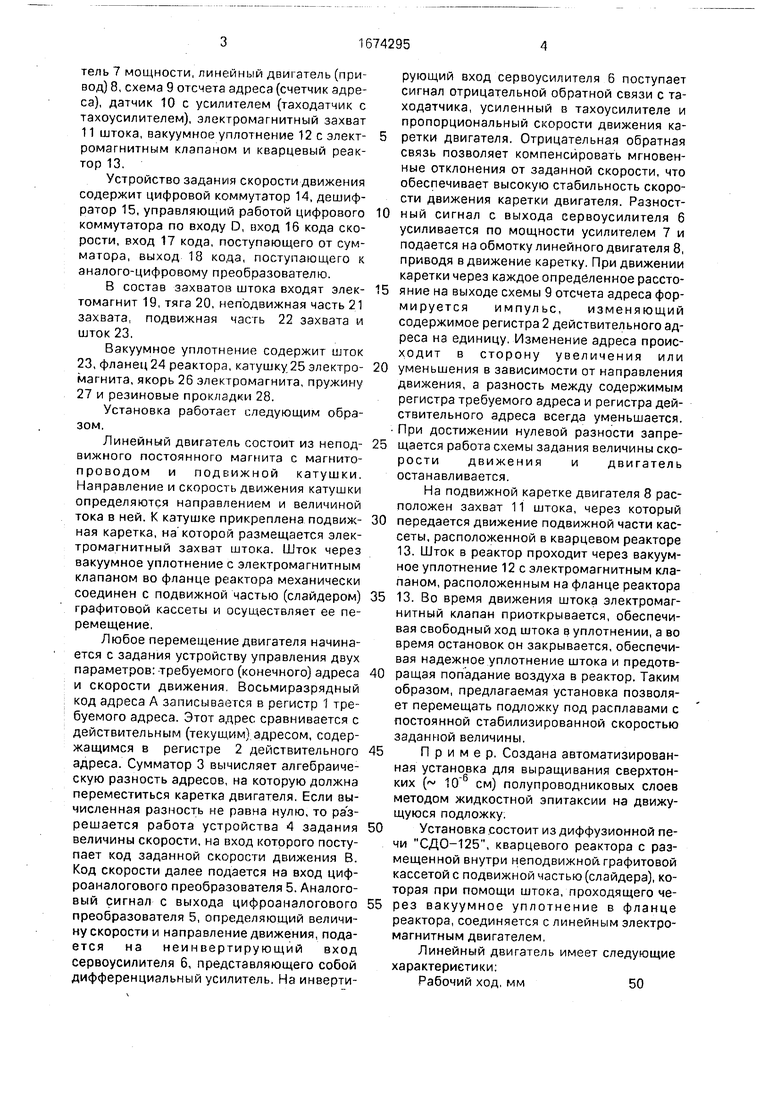
В состав установки входят регистр 1 (требуемого)адреса, регистр 2 (действительного) адреса, сумматор 3. устройство 4 задания величины скорости (задагчик скорости), цифроаналоговый преобразователь 5, дифференциальный сервоусилитель 6. усилитель 7 мощности, линейный двигатель (привод) 8, схема 9 отсчета адреса (счетчик адреса), датчик 10 с усилителем (таходатчик с тахоусилителем), электромагнитный захват 11 штока, вакуумное уплотнение 12 с электромагнитным клапаном и кварцевый реактор 13.
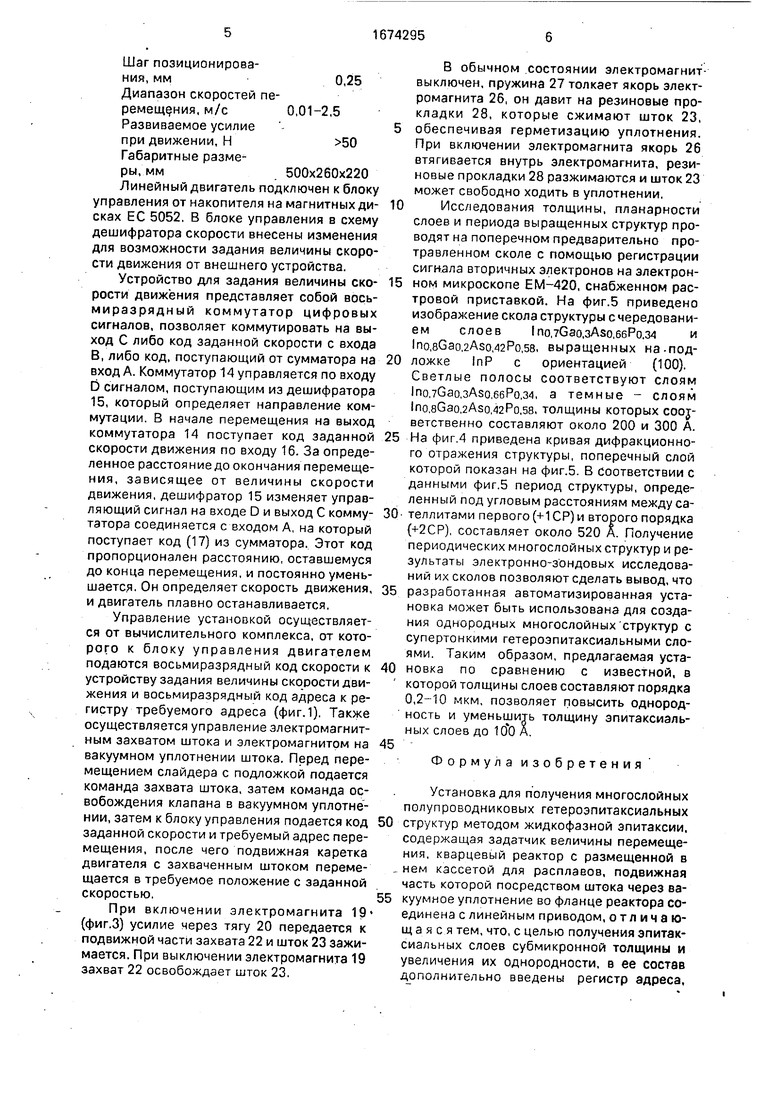
Устройство задания скорости движения содержит цифровой коммутатор 14, дешифратор 15, управляющий работой цифрового коммутатора по входу D, вход 16 кода скорости, вход 17 кода, поступающего от сумматора, выход 18 кода, поступающего к аналого-цифровому преобразователю.
В состав захватов штока входят элек- томагнит 19, тяга 20, неподвижная часть 21 захвата, подвижная часть 22 захвата и шток 23.
Вакуумное уплотнение содержит шток 23, фланец 24 реактора, катушку 25 электромагнита, якорь 26 электромагнита, пружину 27 и резиновые прокладки 28.
Установка работает следующим образом.
Линейный двигатель состоит из неподвижного постоянного магнита с магнито- проводом и подвижной катушки. Направление и скорость движения катушки определяются направлением и величиной тока в ней. К катушке прикреплена подвижная каретка, на которой размещается электромагнитный захват штока. Шток через вакуумное уплотнение с электромагнитным клапаном во фланце реактора механически соединен с подвижной частью (слайдером) графитовой кассеты и осуществляет ее перемещение.
Любое перемещение двигателя начинается с задания устройству управления двух параметров: требуемого (конечного) адреса и скорости движения. Восьмиразрядный код адреса А записывается в регистр 1 требуемого адреса. Этот адрес сравнивается с действительным (текущим) адресом, содержащимся в регистре 2 действительного адреса. Сумматор 3 вычисляет алгебраическую разность адресов, на которую должна переместиться каретка двигателя. Если вычисленная разность не равна нулю, то разрешается работа устройства 4 задания величины скорости, на вход которого поступает код заданной скорости движения В. Код скорости далее подается на вход циф- роаналогового преобразователя 5. Аналоговый сигнал с выхода цифроаналогового преобразователя 5, определяющий величину скорости и направление движения, подается на неинвертирующий вход сервоусилителя 6, представляющего собой дифференциальный усилитель. На инвертирующий вход сервоусилителя 6 поступает сигнал отрицательной обратной связи с та- ходатчика, усиленный в тахоусилителе и пропорциональный скорости движения каретки двигателя. Отрицательная обратная связь позволяет компенсировать мгновенные отклонения от заданной скорости, что обеспечивает высокую стабильность скорости движения каретки двигателя. Разност0 ный сигнал с выхода сервоусилителя б усиливается по мощности усилителем 7 и подается на обмотку линейного двигателя 8, приводя в движение каретку. При движении каретки через каждое определенное рассто5 яние на выходе схемы 9 отсчета адреса фор- мируется импульс, изменяющий содержимое регистра 2 действительного адреса на единицу. Изменение адреса происходит в сторону увеличения или
0 уменьшения в зависимости от направления движения, а разность между содержимым регистра требуемого адреса и регистра действительного адреса всегда уменьшается. При достижении нулевой разности запре5 щается работа схемы задания величины скорости движения и двигатель останавливается.
На подвижной каретке двигателя 8 расположен захват 11 штока, через который
0 передается движение подвижной части кассеты, расположенной в кварцевом реакторе 13. Шток в реактор проходит через вакуумное уплотнение 12 с электромагнитным клапаном, расположенным на фланце реактора
5 13. Во время движения штока электромагнитный клапан приоткрывается, обеспечивая свободный ход штока в уплотнении, а во время остановок он закрывается, обеспечивая надежное уплотнение штока и предотв0 ращая попадание воздуха в реактор. Таким образом, предлагаемая установка позволяет перемещать подложку под расплавами с постоянной стабилизированной скоростью заданной величины.
5Пример. Создана автоматизированная установка для выращивания сверхтонких ( см) полупроводниковых слоев методом жидкостной эпитаксии на движущуюся подложку.
0 Установка состоит из диффузионной печи СДО-125, кварцевого реактора с размещенной внутри неподвижной, графитовой кассетой с подвижной частью (слайдера), которая при помощи штока, проходящего че5 рез вакуумное уплотнение в фланце реактора, соединяется с линейным электромагнитным двигателем.
Линейный двигатель имеет следующие характериетики:
Рабочий ход. мм50
Шаг позиционирования, мм0,25 Диапазон скоростей перемещения, м/с 0,01-2,5 Развиваемое усилие при движении, Габаритные размеры, мм 500x260x220 Линейный двигатель подключен к блоку управления от накопителя на магнитных дисках ЕС 5052. В блоке управления в схему дешифратора скорости внесены изменения для возможности задания величины скорости движения от внешнего устройства.
Устройство для задания величины скорости движения представляет собой восьмиразрядный коммутатор цифровых сигналов, позволяет коммутировать на выход С либо код заданной скорости с входа В, либо код, поступающий от сумматора на входА. Коммутатор 14 управляется по входу D сигналом, поступающим из дешифратора 15, который определяет направление коммутации. В начале перемещения на выход коммутатора 14 поступает код заданной скорости движения по входу 16. За определенное расстояние до окончания перемещения, зависящее от величины скорости движения, дешифратор 15 изменяет управляющий сигнал на входе D и выход С коммутатора соединяется с входом А. на который поступает код (17) из сумматора. Этот код пропорционален расстоянию, оставшемуся до конца перемещения, и постоянно уменьшается. Он определяет скорость движения, и двигатель плавно останавливается.
Управление установкой осуществляется от вычислительного комплекса, от которого к блоку управления двигателем подаются восьмиразрядный код скорости к устройству задания величины скорости движения и восьмиразрядный код адреса к регистру требуемого адреса (фиг.1). Также осуществляется управление электромагнитным захватом штока и электромагнитом на вакуумном уплотнении штока. Перед перемещением слайдера с подложкой подается команда захвата штока, затем команда освобождения клапана в вакуумном уплотнении, затем к блоку управления подается код заданной скорости и требуемый адрес перемещения, после чего подвижная каретка двигателя с захваченным штоком перемещается в требуемое положение с заданной скоростью.
При включении электромагнита 19 (фиг.З) усилие через тягу 20 передается к подвижной части захвата 22 и шток 23 зажимается. При выключении электромагнита 19 захват 22 освобождает шток 23.
В обычном состоянии электромагнит выключен, пружина 27 толкает якорь электромагнита 26, он давит на резиновые прокладки 28, которые сжимают шток 23, обеспечивая герметизацию уплотнения. При включении электромагнита якорь 26 втягивается внутрь электромагнита, резиновые прокладки 28 разжимаются и шток 23 может свободно ходить в уплотнении.
Исследования толщины, планарности слоев и периода выращенных структур проводят на поперечном предварительно протравленном сколе с помощью регистрации сигнала вторичных электронов на электронном микроскопе ЕМ-420, снабженном растровой приставкой. На фиг.5 приведено изображение скола структуры с чередованием слоев lno.7Gao.3Aso.6GPo.34 и lno,8Gao.2Aso.42Po,58, выращенных на-подложке InP с ориентацией (100). Светлые полосы соответствуют слоям 1по,7Сао.зА5о.ббРо.34, а темные - слоям lno8Gao.2Aso,42Po,58, толщины которых соответственно составляют около 200 и 300 А.
На фиг.4 приведена кривая дифракционного отражения структуры, поперечный слой которой показан на фиг.5. В соответствии с данными фиг.5 период структуры, определенный под угловым расстояниям между сателлитами первого (+1СР) и второго порядка 02СР), составляет около 520 А. Получение периодических многослойных структур и результаты электронно-зондовых исследований их сколов позволяют сделать вывод, что
разработанная автоматизированная установка может быть использована для создания однородных многослойных структур с супертонкими гетероэпитаксиальными слоями. Таким образом, предлагаемая установка по сравнению с известной, в которой толщины слоев составляют порядка 0,2-10 мкм, позволяет повысить однородность и уменьшить толщину эпитаксиаль- ных слоев до А.
Формула изобретения
Установка для получения многослойных полупроводниковых гетероэпитаксиальных
структур методом жидкофазной эпитаксии, содержащая задатчик величины перемещения, кварцевый реактор с размещенной в нем кассетой для расплавов, подвижная часть которой посредством штока через вакуумное уплотнение во фланце реактора соединена с линейным приводом, отличающаяся тем, что, с целью получения эпитак- сиальных слоев субмикронной толщины и увеличения их однородности, в ее состав дополнительно введены регистр адреса,
реверсивный счетчик, задатчик скорости, цифроаналоговый преобразователь, дифференциальный сервоусилитель, усилитель мощности, счетчик адреса, датчик скорости с усилителем, электромагнитный захват штока, а вакуумное уплотнение снабжено электромагнитным клапаном, в качестве линейного привода использован линейный электромагнитный двигатель, причем вход регистра адреса соединен с задатчиком величины перемещения, а выход соединен с одним из входов сумматора, второй вход которого соединен с выходом реверсивного счетчика адреса, выход сумматора соединен с одним из входов задатчика скорости, вто0
5
рой вход которого соединен с выходом задатчика перемещения, а выход задатчика скорости соединен с входом цифроаналого- вого преобразователя, выход которого соединен с неинвертирующим входом дифференциального сервоусилителя, выход которого соединен с входом усилителя мощности, выход которого соединен с входом линейного привода, датчик скорости через усилитель соединен с инвертирующим входом дифференциального сервоусилителя, выход счетчика адреса соединен с входом реверсивного счетчика, при этом на линейном приводе размещены датчик скорости и электромагнитный захват штока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для присоединения проволочных выводов полупроводниковых приборов | 1987 |
|
SU1481871A1 |
| Манипулятор и способ управления им | 1990 |
|
SU1782720A1 |
| Аналитический стереофотограмметрический прибор | 1980 |
|
SU932232A1 |
| Устройство для управления многофазным двигателем возвратно-поступательного движения | 1986 |
|
SU1417158A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
| Система для испытания транспортных средств на топливную экономичность | 1985 |
|
SU1587367A1 |
| Система управления автоматической трансмиссией транспортного средства | 1989 |
|
SU1731661A1 |
| Многоканальное устройство программного управления шаговыми двигателями | 1985 |
|
SU1320794A1 |
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ В КОД | 2009 |
|
RU2400014C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 1999 |
|
RU2169426C1 |

Изобретение относится к технологии полупроводников, в частности к технологии выращивания полупроводниковых гетероструктур методом жидкофазной эпитаксии, и может быть использовано для получения квантово-размерных периодических структур с супертонкими активными слоями с целью создания на их основе, например, температурно-стабильных лазеров, быстродействующих транзисторов и т.д. Целью предлагаемого изобретения является повышение качества за счет увеличения однородности слоев по толщине. Цель достигается тем, что в установке для получения многослойных полупроводниковых гетероэпитаксиальных структур методом жидкофазной эпитаксии, включающим кварцевый реактор с размещенной в нем кассетой для расплавов, подвижная часть которой посредством штока через вакуумное уплотнение в фланце реактора соединена с электродвигателем, электродвигатель выполнен в виде линейного электромагнитного двигателя с блоком управления и размещенным в нем устройством задания величины скорости движения, а вакуумное уплотнение выполнено с электромагнитным клапаном для регулировки степени уплотнения штока. 6 ил.
0
Е
; Ч1ЫтН
/7
Фм. 1
Фиг. 2
Фиг.2
JfomH.ed
800 -1CP
W
+1CP
-10 -5
О5 0 Q-ОБР
Фиг. 5
Редахтор А. О rap
И/г 6
Составитель А. Прусковцов
Техред М.МоргенталКорректор О. Кундрик
4
5200
ZCP
(i
igitpn aaetH/t
| Линейный шаговый электропривод | 1984 |
|
SU1244780A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для записи звуковых колебаний | 1921 |
|
SU212A1 |
