Изобретение относится к судовождению морских судов, в частности, в условиях ледового плавания и может быть использовано в комплексных система х контроля и обеспечения безопасности плавания судов,
Цель изобретения - повышение надежности устройства.
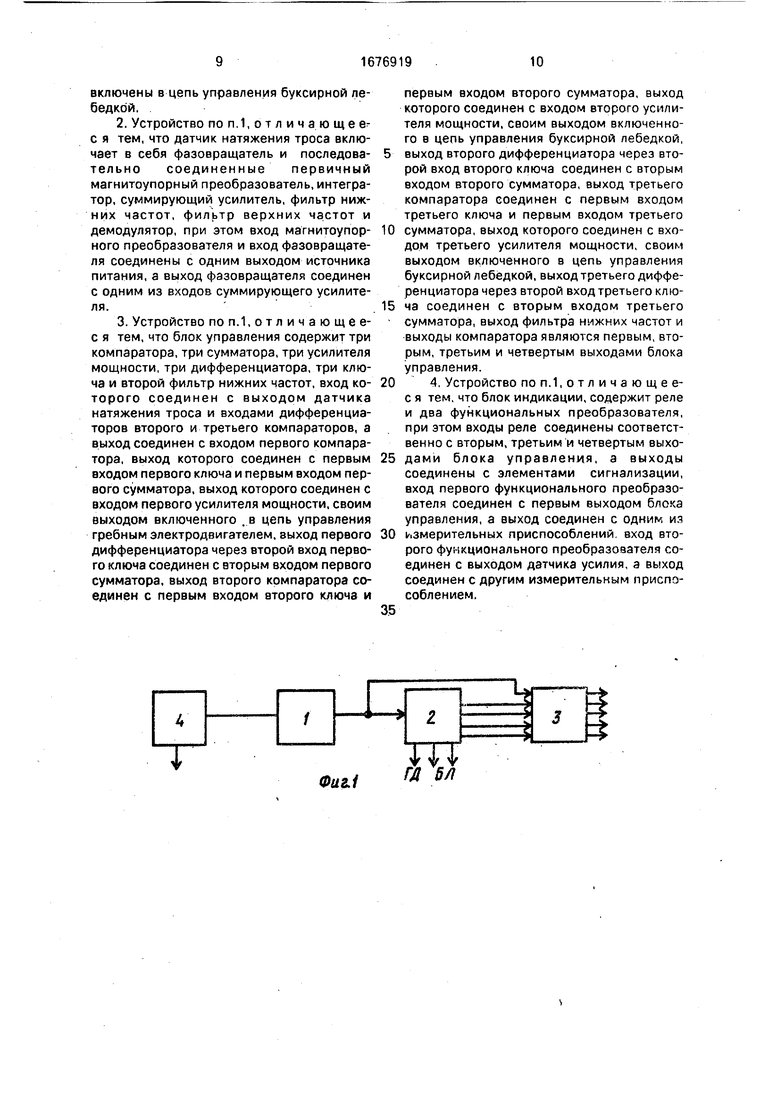
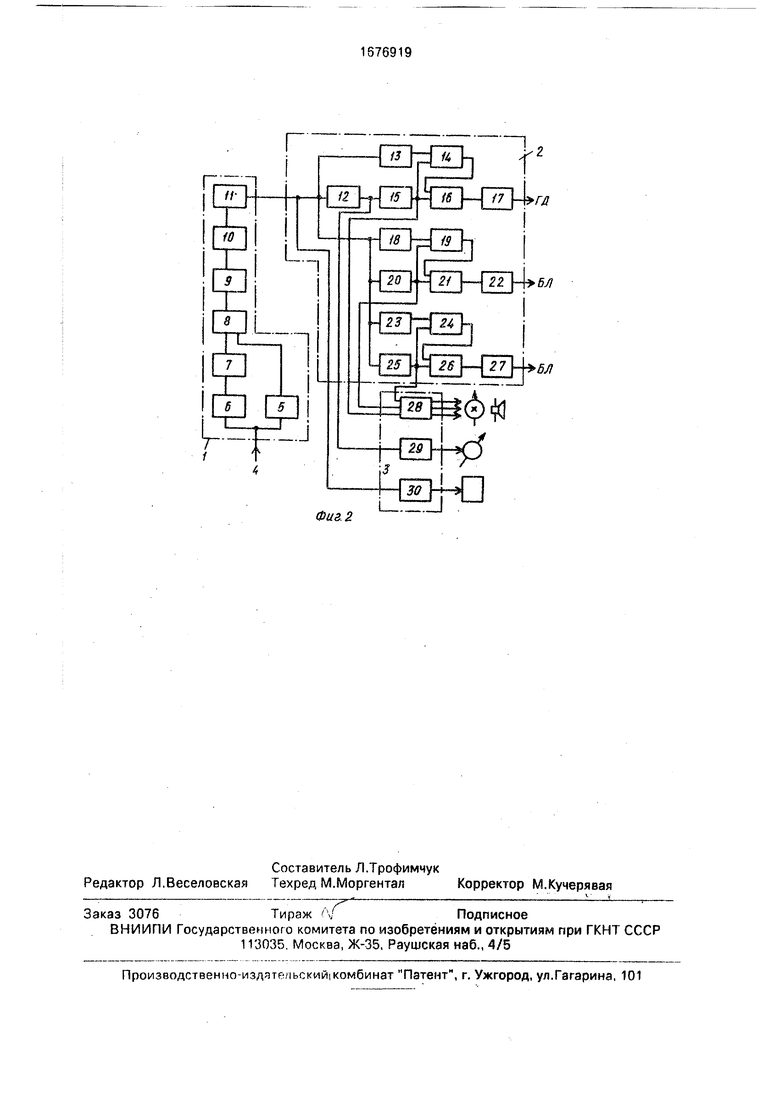
На фиг.1 представлена блок-схема устройства для предупреждения аварии соединительного троса; на фиг.2 - структурная схема устройства.
Устройство содержит датчик 1 натяжения троса, выход которого соединен с входом блока 2 управления и первым входом блока 3 индикации. Первый - четвертый выходы блока 2 управления соединены с соответствующими входами блока 3 индикации. Пятый выход блока 2 управления включен в цепь управления гребным электродвигателем, а шестой и седьмой выходы - в цепь управления буксирной лебедки Вход да гчи- ка натяжения троса соединен с одним из выходов источника 4 питания.
Датчик натяжения троса содержит фа- зоврящатель 5 и последовательно соединенные первичный магнитоупругий преобразователь 6, интегратор 7, счммиру- ющий усилитель 8, первый фипьтр 9 нихних частот, фильтр 10 верхних частот и демодулятор 11. Входы фазовращателя соединены и подключены к одному выходу источника питания. Выход демодулятора является выходом датчика усилия.
Блок 2 управления содержит второй фильтр 12 нижних частот, вход которого соединен с выходом датчика усилия и входом первого дифференциатора 13, своим выходом подключенного к второму входу первою
««а
го ключа 14. Выход фильтра 12 нижних частот соединен с входом первого компаратора 15, выход которого через первый вход первого сумматора 16 соединен с входом первого усилителя 17 мощности. Выход первого усилителя 17 мощности включен в цепь управления гребным электродвигателем Выход первого компаратора 15 также соединен с первым входом первого ключа 14. Выход второго дифференциатора 18 соединен с вторым входом второго ключа 19 Выход второго компаратора 20 через первый вход второго сумматора 21 соединен с вторым усилителем 22 мощности, выход которого включен в цепь управления буксирной лебедки. Выход второго компаратора 20 также соединен с первым входом второго ключа 19, выход которого соединен с вторым входом второго сумматора 21, Выход третьего дифференциатора 23 соединен с вторым входом третьего ключа 24 Выход третьего компаратора 25 через первый вход третьего сумматора 26 соединен с входом третьего усилителя 27 мощности, выход которого включен в цепь управления буксирной лебедки Выход третьего компаратора 25 также соединен с первым входом третьего ключа 24, выход которого соединен с вторым входом третьего сумматора 26. Входы второго дифференциатора 18, второго компаратора 20, третьего дифференциатора 23 и треУьего компаратора 25 соединены с входом второго фильтра 12 нижних частот.
Блок 3 индикации содержит схему реле 28, входы которой соединены соответственно с выходами первого - третьего компараторов блока управления. Выходы схемы реле подключены к элементам световой и звуковой сигнализации Вход первого функционального преобразователя 29 соединен с выходом второго фильтра 12 нижних частот, а выход - с измерительным прибором среднего значения. Вход второго функционального преобразователя 30 соединен с выходом датчика усилия, а выход - с регистрирующим прибором мгновенного значения.
Предлагаемое устройство работает следующим образом.
Усилие F создает пропорциональный вращающий момент М, который вызывает скручивание вала Механические напряжения (7, возникающее, в частности, в поверхностных слоях вала при его скручивании, пропорциональны величине момента М, т.е О пропорционально М. Магнитоупругий преобразователь 6, установленный на валу лебедки, преобразует изменяющиеся во времени под действием усилия F (t) механические напряжения o(i) в электрический сигнал U (t). Однако в отсутствие буксировки, когда F (т.) 0 и cr(t) 0, на выходе магнито- упорного преобразователя 6 действует
электрическое напряжение LJ0 (t) - нулевой сигнал, который необходимо устранить из канала датчика усилия. Сигнал на выходе преобразователя 6 представляет собой сумму U(t, cr(t)),d a(dt) + Qo1 и является результатом дифференцирования в магнито- упорном преобразователе амплитудно- модулированного механическими напряжениями cr(t) магнитного потока магнитоупор- ного преобразователя. Поэтому Щт.)зависит
не только от а, но и от da (t)/dt. Для получения электрического сигнала Ц (t, cr(t)), пропорционально зависящего только от а. сигнал U с выхода магнитоупорного преобразователя 6 подаю г на вход интегратора 7
с выхода интегратора 7 сигнал U lift, cr(t)) н Lb (t) подают на один из входов суммирующего усилителя 8 На другой вход усилителя 8 с выхода фазовращателя 5 подают напряжение Uo(t) При настройке устройства, когда о 0, регулировкой параметров фазовращателя 5 устанавливают фазу напряжения U0 (t) такой, чтобы она отличалась от фазы напряжения Uo (t) на 180°, а амплитуду равной амплитуде U0(t). Тогда на выходе усилителя 8 в отсутствие нагрузки на вял лебедки (усилие F 0, ) нулевой сигнал отсутствует Uo(t) 0. При F - 0 (о 0) на выходе усилителя 5 действует только напряжение U(i,f/(t)). Для исключения погрешности компенсации, связанной с изменением фазы напряжения питания, вход фазовращателя 5 соединяют с тем выходом источника питания, к которому подключен вход магнитоупорного преобразователя 6. Напряжение U(t, 7(т)) подают на вход первого фильтра 9 нижних частот, где полезный сигнал освобождают от высших гармонических составляющих. С выхода первого фильтра 9 нижних частот сигнал поступает на вход
фильтра 10 высоких частот, служащи ; для подавления постоянной составляющей (, выхода первого фильтра 9 низких частот, которая может появляться при регулировке схемы датчика. Очищенный от искажений
сигнал U(t, cr(t)) с выхода фильтра 10 высоких частот подают на вход демодулятора 11, на выходе которого выделяют огибающую U. (О (t)) сигнала U(t, a (t)). Величина U( cr(t), изменяется пропорционально механическим напряжениям a(t), линейно связанным с усилием F (t) в тросе, т.е. U (F(t)). Сигнал U (F(t)) является выходным сигналом датчика 1 тягового усилия.
На входы второго фильтра 12 нижних частот, первого дифференциатора 13, второго дифференциатора 18, второго компаратора 20, третьего дифференциатора 23 и третьего компаратора 25 подают полезный сигнал U (F (t)). На выходе второго фильтра 12 низких частот выделяют постоянную составляющую Uc, величина которой пропорциональная среднему значению усилия F(t). Напряжение Uc подают на вход первого компаратора 15, на другой вход которого подают опорное напряжение Ui . Величину иГ устанавливают пропорциональной предельно допустимому значению средней величины тягового усилия РД1.
Напряжение Ui на выходе компаратора 15 появляется в том случае, когда Uc SUi , Для Uc Ui напряжение на выходе компаратора 15 отсутствует. Выходное напряжение Ui компаратора 15 подают на первый вход первого сумматора 16 и первый вход первого ключа 14. Напряжение Ui открывает первый ключ 14, и через его контакты напряжение Ut1 dU(F(t))/dt с выхода первого дифференциатора 13 поступает на вто- рой вход первого сумматора 16. Выходное напряжение сумматора 16, пропорциональное сумме Ui + Ui1, поступает на вход первого усилителя 17 мощности, с выхода которого усиленное напряжение подают в цепь управления гребным электродвигателем для изменения числа его оборотов (например, для уменьшения скорости хода ледокола), Чем больше dU(F(t))/dt тем больше выходной сигнал усилителя и тем эффек- тивнее реагирует гребной электродвигатель на превышение среднего значения F(t) и набросы нагрузки на трос з этих условиях. Управляющий сигнал с выхода усилителя 17 мощности поступает в цепь управления гребного электродвигателя до тех пор, пока Uc Ui (FCp 5: Рд,). Когда в результате изменения хода ледокола FCp станет меньше гд (Uc Ui ), напряжение Ui на выходе компаратора 15 (первом входе сумматора 16) исчезает. Ключ 14 закрывается и напряжение Ui на втором входе сумматора 16 также исчезает. Таким образом, при Uc Ui напряжение на входах первого сумматора 16 отсутствует и управляющий сигнал в цепь управления гребного электродвигатели не поступает. Электрическое напряжение U2 на выходе второго компаратора 20 возникает в том случае, мгновенно значение U(F(t)) U2 , где U2 опорное напряжение (уставка) второго компаратора. Напряжение устанавливают пропорциональным максимальной допустимой величине динамического усилия Рд2. Для U(F(t)) Ua
напряжение на выходе компаратора 20 отсутствует. Напряжение Uj подают на первый вход второго сумматора 21 и первый вход второго ключа 19. Напряжение Uz открывает второй ключ 19 и через его контакты напряжение Ua1 dU(F(t))/dt с выхода второго дифференциатора 18 поступает на второй вход сумматора 21. Выходное напряжение сумматора 21, пропорциональное сумме Uz +U21, поступает на вход второго усилителя 22 мощности, с выхода которого усиленное напряжение подают в цепь управления буксирной лебедки для ее включения и приведения барабана во вращение в направлении увеличения длины (стравливания) буксирного троса. Чем больше dv(F(t))/dt, тем больше выходной сигнал усилителя 22 и тем эффективнее реагирует буксирная лебедка на недопустимое превышение мгновенным значением F(t) допустимого РД2. Управляющий сигнал действует в цепи управления буксирной лебедки до тех пор пока U(F(t)) U2 (F(t) FA2). Когда в результате стравливания троса F(t) станет меньше Рда (U(F(t)) U2 ), напряжение Us на выходе компаратора 20 исчезает. Ключ 19 закрывается и напряжение U21 на втором входе сумматора 214также исчезает Таким образом, при U(F(t))z напряжение на входах Еторого сумматора 21 отсутстсуют и управляющий сигнап в цепь управления буксчр- ной лебедкой не поступает.
Электрическое напряженна Us на выходе т ретьего компаратора 25 возникает в том случае, когда мгновенное значение U(FM) Us , где Ua - опорное напряжение третьего компаратора. Напряжение Us устанавливают пропорциональным минимальной допустимой величине динамического усилия Рдз. Для U(F(t)) Us напряжение на выходе компаратора 25 отсутствует. Напряжение из подают на первый вход третьего сумматора 26 и первый вход третьего ключа 25 Напряжение Уз открывает третий ключ 24 и чорез его контакты напряжение UG dv(F(t))/dt с выхода третьего д лфференциатора 23 поступает на второй вход сумматора 26. Выходное напряжение сумматора 26, пропорциональное сумме Ua + из , поступает на вход третьего усилителя 27 мощности, с выхода которого усиленное напряжение подают в цепь управления буксирной лебедки для ее включения и приведения барабана во вращение в направление уменьшения длины (выбирания) буксирного троса. Чем больше dv(F(t))/dt, тем больше выходной сигнал усилителя 27 :i тем эффективнее реагирует буксирная лебедка на снижение мгновенного значений F(t) по сравнению с минимальным допустимым значением Ffl3.
Управляющий сигнал действует в цепи управления буксирной лебедки до тех пор, пока U(F(t) Ua (F(t) Рдз). Когда в результате выбирания троса F(t) станет больше Рдз (U(F(t)) Уз), напряжение Уз на выходе компаратора 25 (первом входе сумматора 26) исчезает. Ключ 24 закрывается, и напряжение Уз1 на втором входе сумматора 26 та,кже исчезает. Таким образом, npnU(F(t) Ua напряжения на входах третьего сумматора 26 отсутствуют и управляющий сигнал в цепь управления буксирной лебедки не поступает.
В нормальном состоянии реле 28 схемы включены. При срабатывании компараторов 15, 20 и 25 блока управления с их выходов на соответствующие входы реле 28 поступают электрические сигналы, которые выключают питание соответствующих реле. Контакты реле воздействуют на цепи управления элементов световой и звуковой сигнализации, предупреждающей судоводителя об опасности. На вход первого функционального преобразователя 29 поступает с выхода второго фильтра низких частот блока управления электрическое напряжение Vc, пропорциональное FCp которое индицируется соответствующим измерительным прибором среднего значения. На вход второго функционального преобразователя 30 поступает с выхода датчика 1 усилия электрическое напряжение V(F(t}), которое регистрируется соответствующим прибором. Функциональные преобразователи обеспечивают заданную нелинейность шквал измерительного и регистрирующего приборов, В предлагаемом устройстве цепь управления гребного двигателя регулируют по сигналу, пропорциональному среднему значению тягового усилия в тросе. Это вызвано большой инерцией ледокола и его системы электродвижения, ввиду которой кратковременное изменение параметров цепи управления гребного электродвигателя практически не изменит скорости движе- ния ледокола. Поэтому этот канал автоматического регулирования натяжения троса (канал первого компаратора 15) включается и эффективно работает, например, в тех случаях, когда буксируемое судно уменьшает ход ввиду наличия мешающих движению льдин, а ледокол сохраняет свою скорость движения. В этой ситуации повышенное натяжение троса может сохраняться сравнительно долго, и ограниченным увеличением длины буксировочного троса не удается снизить напряжение в тросе до допустимой величины, а соответствующее уменьшение хода ледокола может устранить опасность аварии. Цепь управления буксирной лебедкой в связи со сравнительно небольшой ее инерцией регулируют по сигналу, пропорциональному мгновенному
значению тягового усилия. Канал второго компаратора вырабатывает управляющий сигнал в том случае, когда мгновенное значение тягового усилия превосходит максимально допустимую величину динамического усилия в тросе. Такое динамическое нагружение троса часто происходит, например, при соскальзывании ледокола с льдины в воду. При динамическом перенапряжении , троса электрический сигнал канала второго
компаратора включает лебедку на стравливание троса. При этом увеличивается длина троса между ледоколом и судном, что уменьшает усилие в тросе, Когда усилие станет меньше максимально допустимого, лебедка
выключается. После этого а результате маневров ледокола и судна может возникнуть нежелательное провисание троса, которое может быть устранено следующим включением лебедки на выбцрание троса по управляющему сигналу, вырабатываемому каналом третьего компаратора. Таким образом, каналы второго и третьего компаратора включаются поочередно, а каналы первого и второго компараторов могут работать одновременно. Дифференциаторы введены в устройство для форсирования управления по основному сигналу. В качестве первичного преобразователя тягового усилия в предлагаемом устройстве использован
кольцевой магнитоупругий преобразователь момента.
Формула изобретения 1. Предохранительное устройство для троса, содержащего судно с буксиром, на
котором установлены электродвигатель гребного винта и лебедка с цепью управления, содержащее источник питания с подключенным к нему датчиком натяжения троса, элементы сигнализации и измерительное приспособления, отличающее- с я тем, что, с целью повышения надехно- сти устройства, оно снабжено блоком управления и блоком индикации, при этом выход датчика натяжения троса соединен с входом
блока управления и первым входом блока индикации, выходы которого соединены соответственно с элементами сигнализации и измерительными приспособлениями, а первый, второй, третий и четвертый выходы
блока управлений соединены с соответствующими входами блока индикации, пятый выход блока управления включен в цепь управления гребным электродвигателем, шестой и седьмой выходы блока управления
включены в цепь управления буксирной лебедкой.
2.Устройство поп.1,отличающее- с я тем, что датчик натяжения троса включает в себя фазовращатель и последова- тельно соединенные первичный магнитоупорный преобразователь, интегратор, суммирующий усилитель, фильтр нижних частот, фильтр верхних частот и демодулятор, при этом вход магнитоупор- ного преобразователя и вход фазовращателя соединены с одним выходом источника питания, а выход фазовращателя соединен
с одним из входов суммирующего усилителя.
3.Устройство поп.1,отличающее- с я тем, что блок управления содержит три компаратора, три сумматора, три усилителя мощности, три дифференциатора, три ключа и второй фильтр нижних частот, вход ко- торого соединен с выходом датчика натяжения троса и входами дифференциаторов второго и третьего компараторов, а выход соединен с входом первого компаратора, выход которого соединен с первым входом первого ключа и первым входом первого сумматора, выход которого соединен с входом первого усилителя мощности, своим выходом включенного . в цепь управления гребным электродвигателем, выход первого дифференциатора через второй вход первого ключа соединен с вторым входом первого сумматора, выход второго компаратора соединен с первым входом второго ключа и
первым входом второго сумматора, выход которого соединен с входом второго усилителя мощности, своим выходом включенного в цепь управления буксирной лебедкой, выход второго дифференциатора через второй вход второго ключа соединен с вторым входом второго сумматора, выход третьего компаратора соединен с первым входом третьего ключа и первым входом третьего сумматора, выход которого соединен с входом третьего усилителя мощности, своим выходом включенного в цепь управления буксирной лебедкой, выход третьего дифференциатора через второй вход третьего ключа соединен с вторым входом третьего сумматора, выход фильтра нижних частот и выходы компаратора являются первым, вторым, третьим и четвертым выходами блока управления.
4. Устройство по п. 1, о т л и ч а ющее- с я тем, что блок индикации, содержит реле и два функциональных преобразователя, при этом входы реле соединены соответственно с вторым, третьим и четвертым выходами блока управления, а выходы соединены с элементами сигнализации, вход первого функционального преобразователя соединен с первым выходом блока управления, а выход соединен с одним из измерительных приспособлений, вход второго функционального преобразователя соединен с выходом датчика усилия, а выход соединен с другим измерительным приспособлением.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления буксировкой судов | 1989 |
|
SU1678695A1 |
| Устройство для компенсации нелинейности объекта типа "люфт | 1983 |
|
SU1108387A1 |
| Устройство для определения теплоемкости термозависимых элементов | 1989 |
|
SU1679331A1 |
| Устройство формирования калибровочного сигнала | 1984 |
|
SU1264318A1 |
| Бесконтактный двигатель постоянного тока | 1987 |
|
SU1684900A1 |
| СИСТЕМА ИЗМЕРЕНИЯ ВЫСОТНО-СКОРОСТНЫХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2477862C1 |
| АНАЛОГОВЫЙ ПРИЕМНИК ОДНОПОЛОСНЫХ СИГНАЛОВ С ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2000 |
|
RU2195074C2 |
| Система управления | 1983 |
|
SU1168896A1 |
| Способ управления электродвигателем скребкового конвейера и электропривод для его осуществления | 1988 |
|
SU1647839A1 |
| Аналого-цифровой частотомер | 1988 |
|
SU1712894A1 |
Изобретение касается судовождения морских судов, в частности в условиях ледового плавания, и может быть использовано в комплексных системах контроля и обеспечения безопасности плавания судов. Цель изобретения - повышение надежности устройства. Устройство содержит датчик 1 натяжения каната, выход которого соединен с входом блока 2 управления и первым входом блока 3 индикации. Вход датчика натяжения каната соединен с одним из выходов источника питания. Датчик 1 натяжения каната содержит фазовращатель 5 и последовательно соединенные магнитоупругий преобразователь 6, интегратор 7, суммирующий усилитель 8, первый фильтр 10 верхних частот и демодулятор 11. Блок управления содержит второй фильтр 12 нижних частот, дифференциатор 13, ключ 14, компаратор 15, сумматор 16, усилитель 17 мощности, второй дифференциатор 18, второй ключ 19. 3 з.п. ф-лы, 2 ил.
Фиг 2
L..
| Кичкин И.И | |||
| Датчики судовым систем и дистанционного контроля | |||
| М.: Транспорт, 1964, с | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
