Изобретение относится к подъемно- транспортному оборудованию, в частности к грузозахватным устройствам.
Цель изобретения - повышение удобства в эксплуатации.
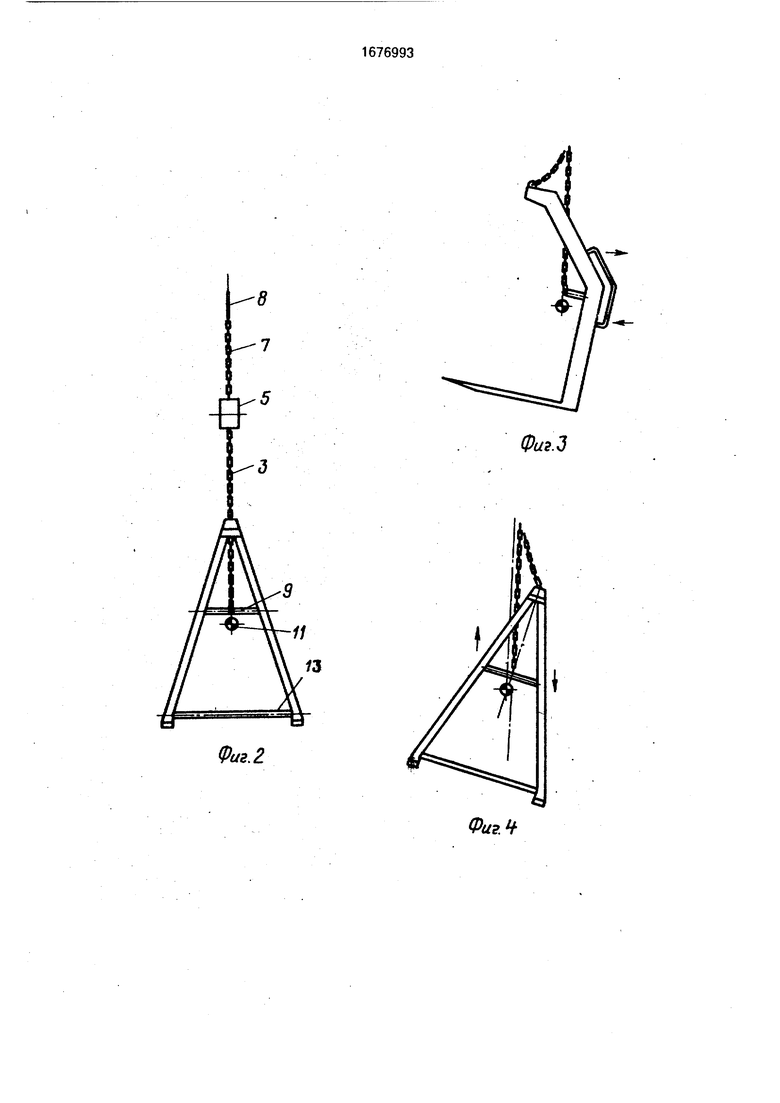
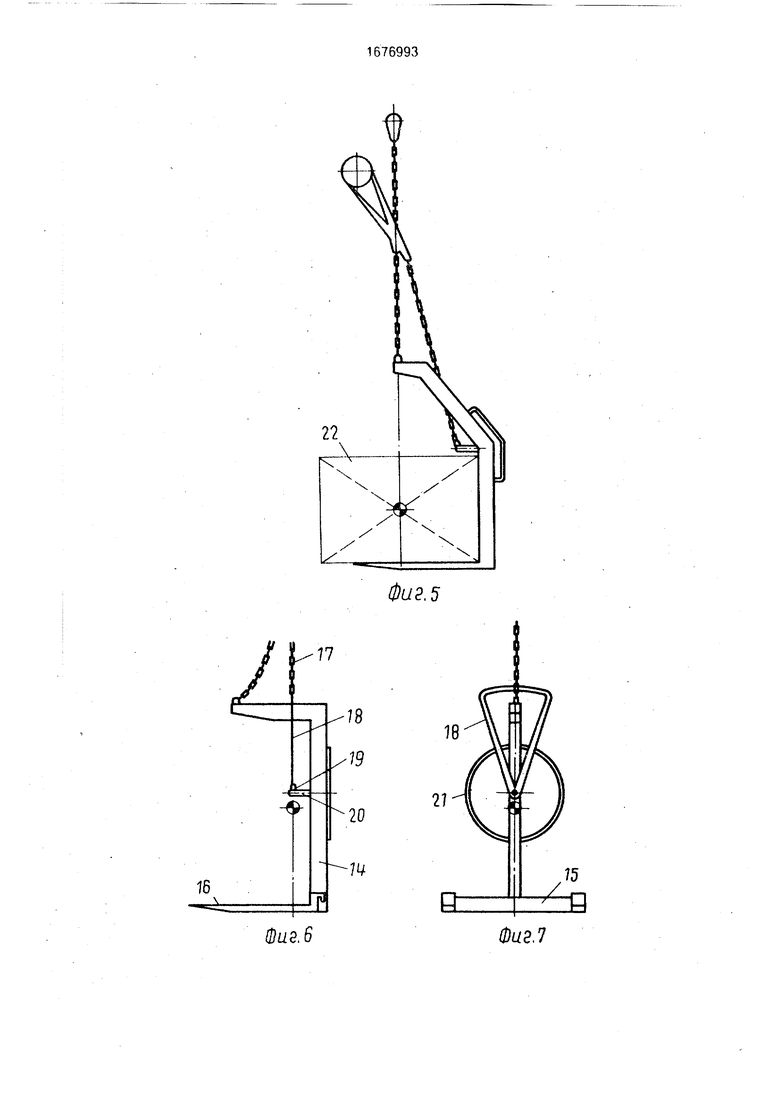
На фиг. 1 показан захват без груза, общий вид; на фиг. 2 - то же, вид сбоку; на фиг, 3 - наклон захвата в продольной плоскости; на фиг. 4 - наклон захвата в поперечной плоскости; на фиг. 5 - захват в транспортном положении с грузом; на фиг. 6 - вариант выполнения захвата с одной стойкой, общий вид; на фиг. 7 - то же, вид сбоку.
Крановый вилочный захват содержит соединенные между собой верхними концами стойки 1 с горизонтальными вилами 2 на нижних концах, соединенный со стойками 1 отрезок 3 грузового стропа, тягу 4, балансир 5с противовесом 6 на конце, второй отрезок 7 грузового стропа с петлей 8 для соедине- ия с подъемной машиной, жестко прикреп- ленный к стойкам 1 кронштейн 9 с шарниром 10, который размещен вблизи центра тяжести 11 порожнего захвата, ручки 12 для наведения захвата на груз. Тяга 4 одним концом соединена с шарниром 10, а вторым - с концом балансира 5. Концы отрезков 3 и 7 соединены со средней частью балансира 5. Стойки 1 в нижней части связаны между собой перекладиной 13.
Возможны и другие варианты выполнения захвата. Например, к центральной стойке 14 (см. фиг. 6 и 7) крепится в нижней части поперечина 15 с вилами 16. Часть тяги 17 представляет собой замкнутый плоский элемент 18 и имеет вид сектора, вершина которого соединена с шарниром 19 кронштейна 20, а ручка 21 выполнена в виде кольца, которое прикреплено к стойке 14.
Эксплуатируют захват следующим образом.
Соединенный с подъемной машиной при помощи скобы 8 захват подводят к грузу 22, а затем под него заводят вилы 2. Отрезок 3 грузового стропа при этом ослаблен, а
захват подвешен на втором отрезке 7 грузового стропа и на тяге 4. Если груз 22 установлен на наклонной площадке, то захват при помощи ручек 12 легко наклоняется в любую сторону, так как шарнир 10 тяги 4
расположен вблизи центра тяжести 11 порожнего захвата. После заведения вил 2 под груз 22 производится его транспортировка. При этом происходит натяжение отрезка 3 грузового стропа и поворот балансира 5 и
как следствие этого перемещение противовеса 6 в верхнее положение, т. е. захват с грузом 22 оказывается соединенным с подъемной машиной при помощи двух отрезков 3 и 7 грузового стропа. По окончании транспортировки балансир 5 возвращается в исходное положение и захват извлекается из-под груза 22.
Формула изобретения Захват, содержащий стойки с горизонтальными вилами на нижних концах для груза, шарнирно прикрепленные к стойкам одними концами участок грузового стропа и гибкую тягу, соединенный первым своим концом с вторым концом тяги, а средней
частью - со вторым концом участка стропа балансир с противовесом на втором конце и прикрепленный к балансиру второй участок грузового стропа со скобой на свободном конце для соединения с подъемной
машиной, отличающийся тем, что, с целью повышения удобства в эксплуатации, шарнир для соединения первого конца тяги со стойками размещен на жестко прикрепленном к ним в зоне их средней части гори0 зонталъном кронштейне, при этом первый конец тяги соединен с кронштейном посредством сферического шарнира.
Фиг. 2
Фиг.З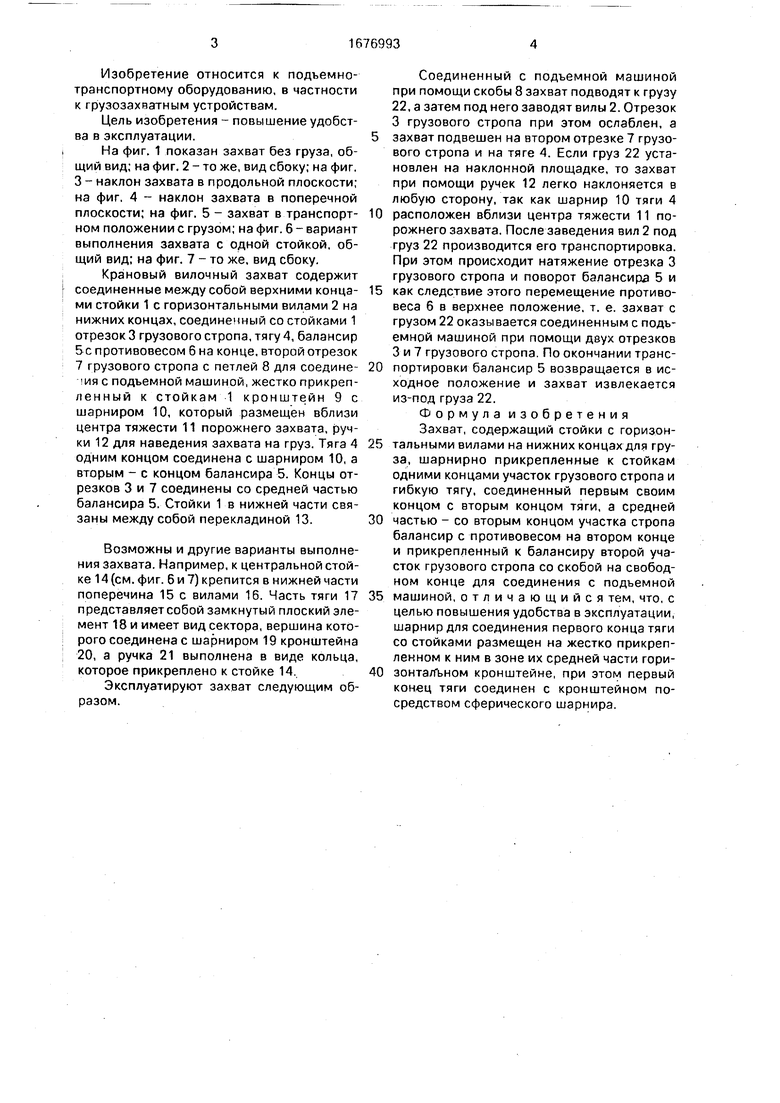
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАНОВЫЙ ВИЛОЧНЫЙ ЗАХВАТ | 1992 |
|
RU2057055C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ КРУПНОГАБАРИТНОГО ЗЕРКАЛА ТЕЛЕСКОПА С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 2024 |
|
RU2837324C1 |
| Вилочный захват | 1979 |
|
SU867841A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ВИЛОЧНОГО ПОГРУЗЧИКА | 1991 |
|
RU2011636C1 |
| Захват для пакетированных грузов на поддонах | 1980 |
|
SU1030295A1 |
| Грузозахватное устройство | 1988 |
|
SU1696371A1 |
| Захватное устройство | 1986 |
|
SU1384519A1 |
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| Захват для контейнера | 1987 |
|
SU1528720A1 |
| Грузоподъемное устройство | 1989 |
|
SU1654247A1 |
Изобретение относится к подъемно- транспортному оборудованию, в частности к грузозахватным устройствам. Цель изобретения - повышение удобства в эксплуатации. Захват содержит стойки 1 с вилами 2, отрезки 3 и 7 грузового стропа, тягу 4, балансир 5 с противовесом 6. кронштейн 9 с шарниром для присоединения тяги 4. В исходном положении захват подвешен к подъемной машине на отрезке 7 грузового -стропа и тяге 4. Противовес 6 балансира 5 находится в нижнем положении. За счет размещения шарнира 10 вблизи центра тяжести 11 порожнего захвата он легко может быть наклонен в любую сторону при подведении вил 2 под груз. После заведения вил 2 под груз производится его транспортировка. Захват с грузом при этом подвешен на отрезках 3 и 7 грузового cf ропа. Противовес находится в верхнем положении. 7 ил. 8 О х| О Ю Ю 00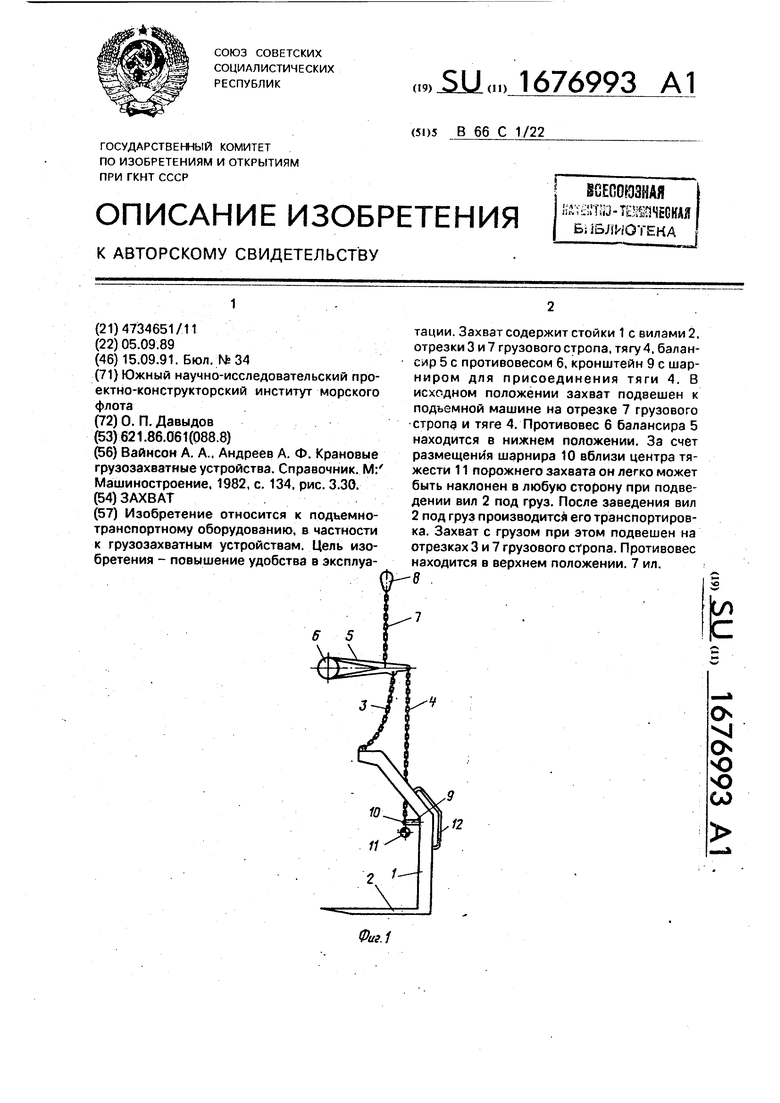
Фиг ЧФаз. 5
18
| Вайнсон А | |||
| А. | |||
| Андреев А | |||
| Ф | |||
| Крановые грузозахватные устройства | |||
| Справочник | |||
| М: Машиностроение | |||
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Халат для профессиональных целей | 1918 |
|
SU134A1 |
| рис | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
