J 5- 2 ;/ 4- I
// / / / S
ю
|о о /о о/о I
I о о о о о о I
////////////
.WaWW .950
7/ /// -
// /
I 7 Н6 47
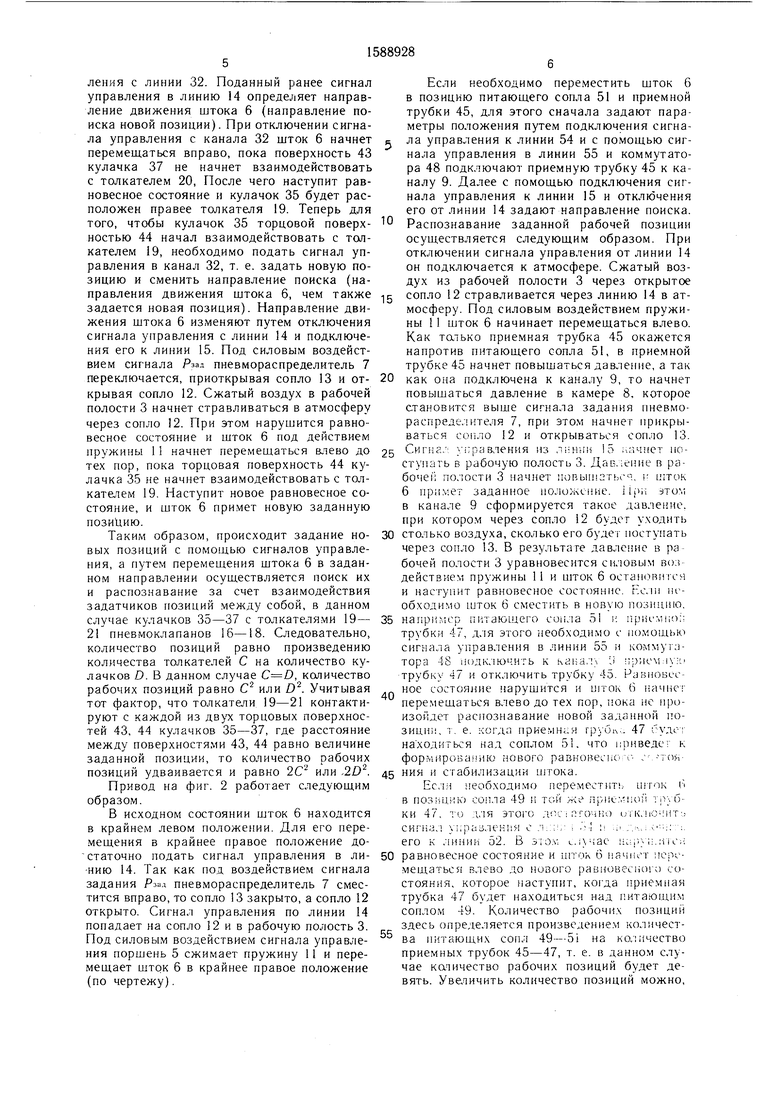
Фиг. 2
(I
52
8
5Г
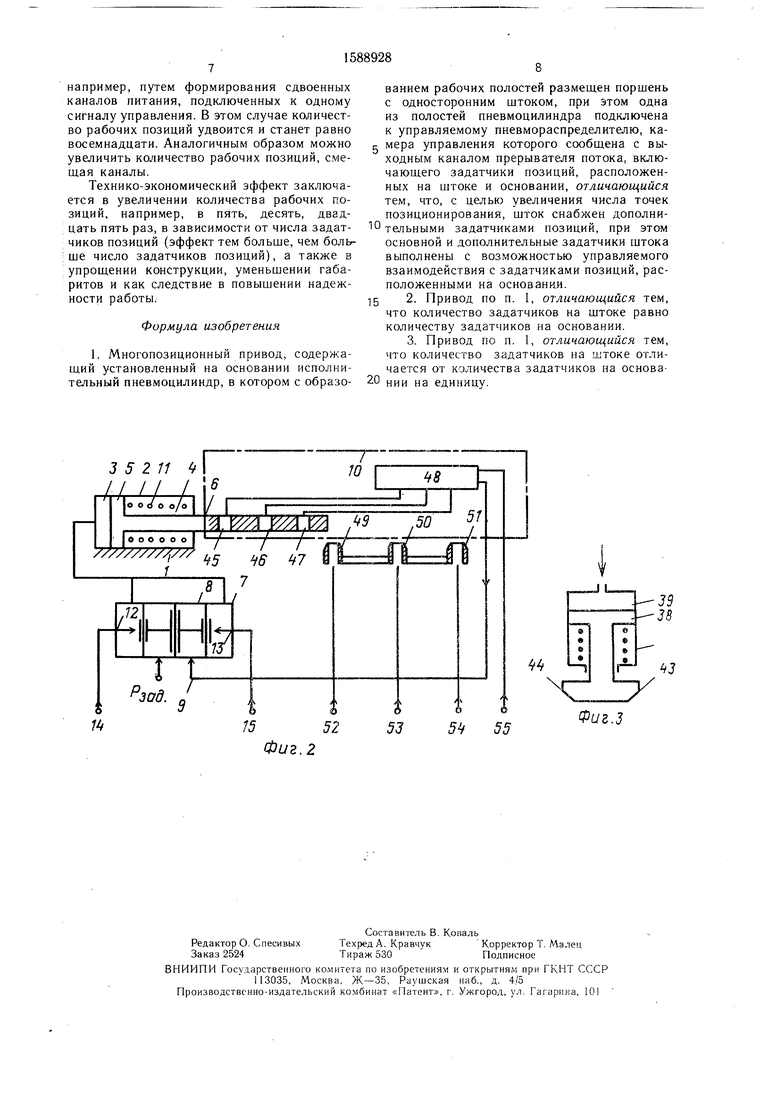
39 38
44
3
6
53
5 55
Фиг.5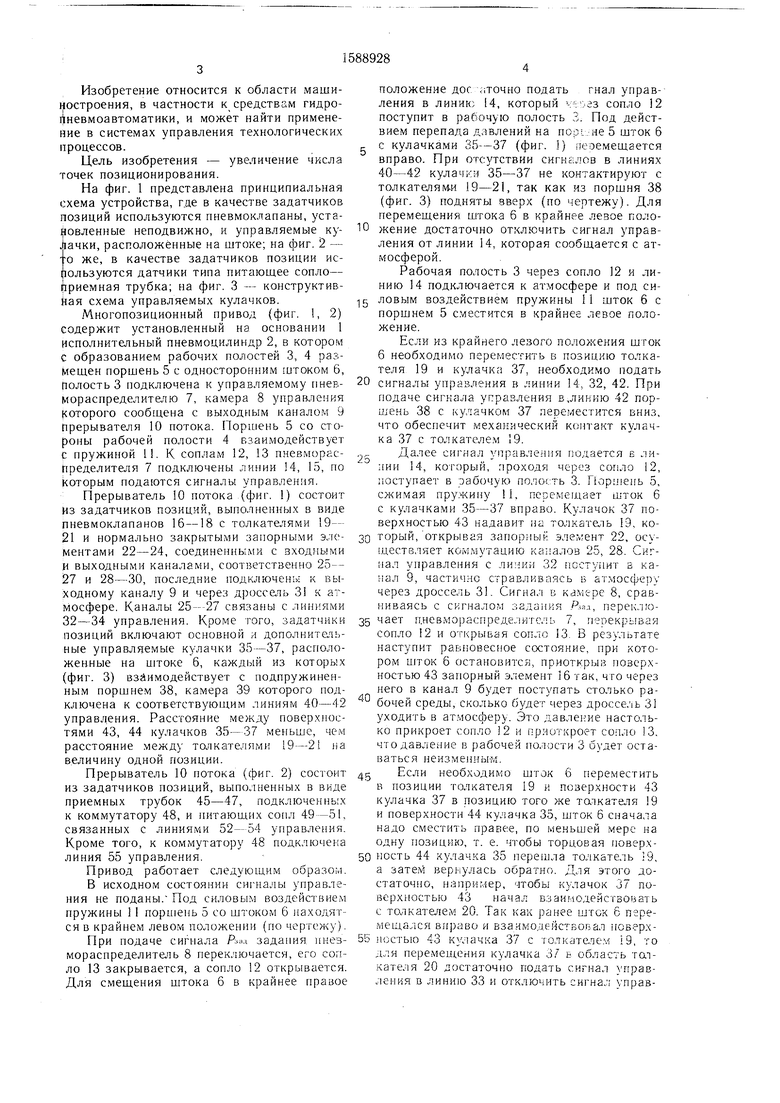
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционный привод | 1988 |
|
SU1504380A1 |
| Многопозиционный привод | 1989 |
|
SU1681063A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Многопозиционный привод | 1989 |
|
SU1765543A2 |
| Установка для определения термической стойкости веществ | 1985 |
|
SU1293566A1 |
| Вакуумное реле | 1983 |
|
SU1232969A1 |
| Устройство для подачи ящиков с откидными крышками и их закрывания | 1985 |
|
SU1333612A1 |
| Заглушка для полых изделий | 1972 |
|
SU468124A1 |
| Устройство для сборки деталей | 1987 |
|
SU1535691A1 |
| УДАРНО-ВРАЩАТЕЛЬНЫЙ МЕХАНИЗМ | 1992 |
|
RU2062691C1 |
Изобретение относится к машиностроению и может быть использовано в системах управления технологических процессов. Цель изобретения - увеличение числа точек позиционирования. Многопозиционный привод содержит исполнительный пневмоцилиндр 2, в котором с образованием рабочих полостей 3 и 4 размещен поршень 5 с штоком 6. Задание позиций осуществляется с помощью подачи сигналов управления в линии 14, 15, 32, 33, 34, 40, 41 и 42, а путем перемещения штока 6 в заданном направлении происходит поиск их и распознование за счет взаимодействия задатчиков позиций между собой, в данном случае управляемых кулачков 35-37 с толкателями 19-21 пневмоклапанов 16-18. Следовательно, количество позиций равно произведению количества толкателей на количество кулачков. Учитывая тот факт, что толкатели 19-21 контактируют с каждой из двух торцовых поверхностей 43 и 44 кулачков 35-37, где расстояние между поверхностями равно величине заданной позиции, то количество рабочих позиций удваивается. 3 з.п.ф-лы, 3 ил.
| Многопозиционный привод | 1988 |
|
SU1504380A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
