Изобретение относится к сельскохозяйственному машиностроению, а именно к ус- тройгтвам для управления и автоматического регулирования рабочего положения навесных и полунавесных сельскохозяйственных машин.
Цель изобретения - расширение функциональных возможностей регулятора.
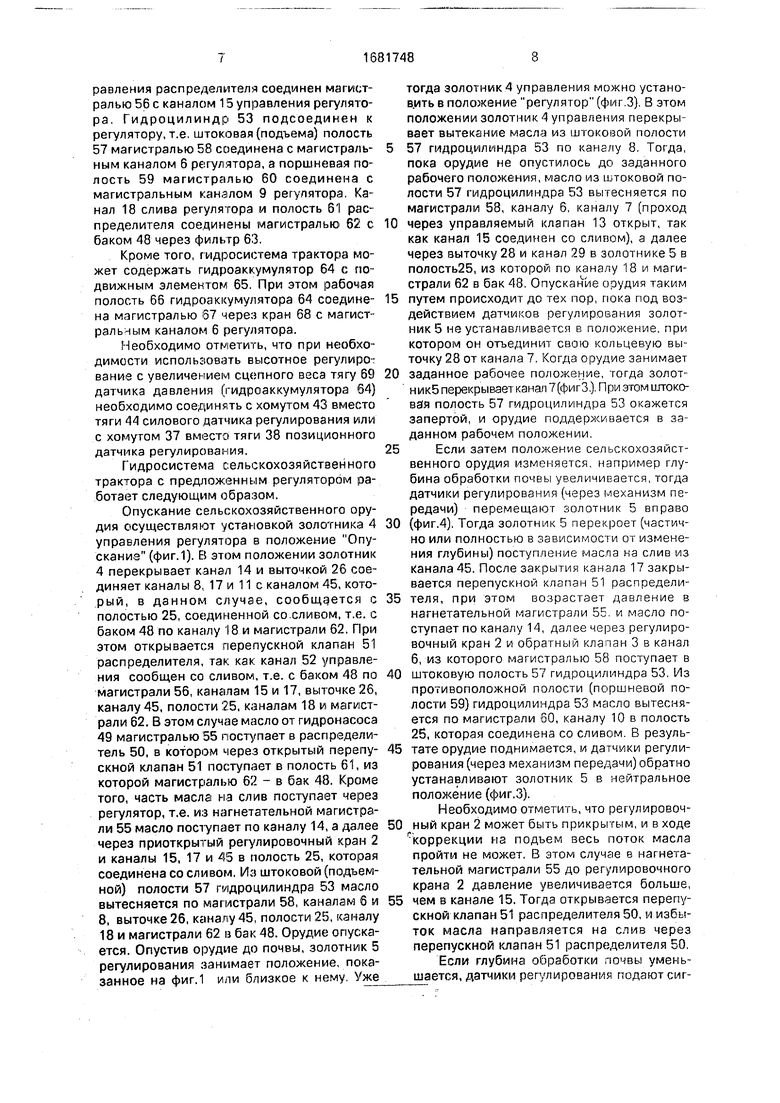
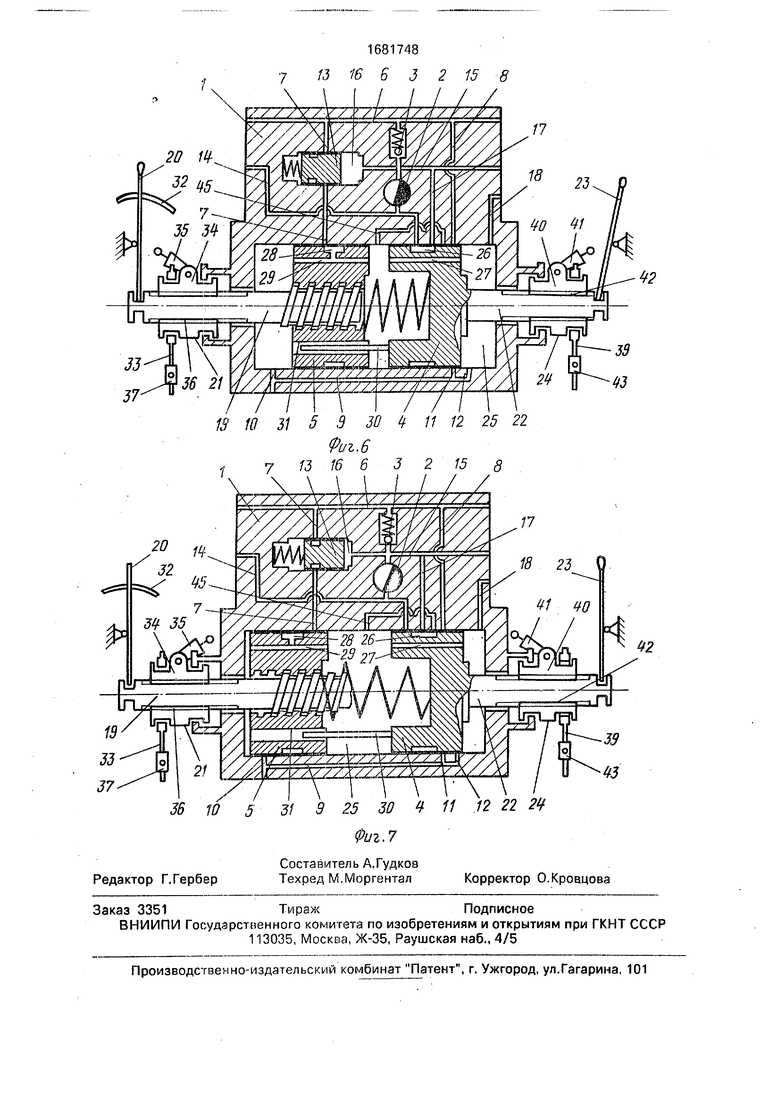
На фиг, 1 изображен регулятор при опускании орудия в рабочее положение; на фиг.2 - датчики регулирования; на фиг.З - схема гидросистемы с регулятором при рабочем положении орудия; на фиг.4- регулятор при коррекции орудия на подъем; на фиг.5 - то же, при коррекции орудия на опускание; на фиг.6 - то же, при подъеме орудия в транспортное положение; на фиг.7 - то же, при транспортировании орудия.
Регулятор гидросистемы управления сельскохозяйственными орудиями содержит размещенные в корпусе 1 регулировоч- ный кран 2, обратный клапан 3, гидравлически соединенные золотник 4 управления и золотник 5 регулирования, пер- вый магистральный канал 6 (для подсоединения штоковой (подъемной) полости гидроцилиндра), сообщенный каналом 7 с золотником 5 регулирования и сообщенный каналом 8 с золотником 4 управления, второй магистральный канал 9 (для подсоединения поршневой полости гидроцилиндра), .сообщенный каналом 10 с золотником 5 регулирования и сообщенный каналами 11 и 12 с золотником 4 управления, управляемый клапан 13, установленный в канале 7, соединяющем магистральный канал 6 с золотником 5 регулирования, нагнетательный канал 14, соединенный с золотником 4 управления и соединенный через регулировочный кран 2 и обратный клапан 3 с магистральным каналом 6, канал 15 управления, соединенный с полостью 16 управления управляемого клапана 13 и соединенный каналом 17 с золотником 4 управления, канал 18 слива, валик 19, сопряженный резьбой с золотником 5 регулирования, рукоятку 20 настройки, которая соединена с валиком 19 с возможностью его вращения, узел 21 подсоединения, например, позиционного датчика регулирования, второй валик 22, конец второго жестко соединен с золотником 4 управления, рукоятку 23 управления, которая соединена с валиком 22 с возможностью его вращения, и узел 24 подсоединения, например, силового датчика регулирования.
Золотник 4 управления и золотник 5 регулирования, размещены в полости 25, которая каналом 18 соединена со сливом. Золотник 4 управления имеет кольцевую
выточку 26 и канал 27, а золотник 5 регулирования имеет сообщенные между собой кольцевую выточку 28 и канал 29. Золотник 5 регулирования соединен с золотником 4
управления с возможностью осевого передвижения, т.е. золотник 4 управления соединен с золотником 5 регулирования через соединительный штифт 30, конец которого жестко прикреплен к золотнику 4, а сам
0 штифт 30 расположен в отверстии 31, которое высверлено в золотнике 5. При этом валик 19, золотник 5, золотник 4 и валик 22 размещены в корпусе 1 концентрично, а штифт 30 вынесен от этого центра.
5 Валик 19 в корпусе 1 регулятора установлен с возможностью вращения и осевого передвижения. При этом конец валика 19 соединен с рукояткой 20 настройки, которая поддерживает валик 19 в заданном по0 ложении относительно осевого передвижения, но не мешает ему вращаться. Рукоятка 20 настройки фиксируется на секторе 32.
Узел 21 подсоединения первого датчика
5 регулирования состоит из рычага 33 и муфты 34 с рукояткой 35. Муфта 34 соединена шлицом 36 с валиком 19 и соединена с корпусом 1 с возможностью вращения. Таким образом, в момент движения валика 19 по осево0 му направлению муфта 34 остается на месте, а при вращении муфты 34 валик 19 вращается вместе с ней. Рычаг 33 свободно посажен на муфте 34. Рукоятка 35 предусмотрена для соединения рычага 33 с муфтой
5 34 и для фиксации муфты 34 относительно корпуса 1 (т.е. для фиксации муфты 34 от вращения). Рычаг 33 снабжен передвижным (вдоль его оси) хомутом 37 для подсоединения, например, позиционного датчика регу0 лирования (т.е. хомут 37 соединяется с тягой 38 (фиг.2) позиционного датчика регулирования).
Узел 24 подсоединения второго датчика регулирования состоит из рычага 39 и муфты
5 40 с рукояткой 41. Муфта 40 соединена шлицем 42 с валиком 22 и с корпусом 1 с возможностью вращения. Таким образом, в момент движения валика 22 по осевому направлению муфта 40 остается на месте, а
0 при вращении муфты 40 валик 22 вращается с ней. Рычаг 39 свободно посажен на муфте 40. Рукоятка предусмотрена для соединения рычага 39 с муфтой 40 и для фиксации муфты 40 относительно корпуса 1, т.е. для
5 фиксации муфты 40 от вращения. Рычаг 39 снабжен передвижным (вдоль его оси) хомутом 43 для подсоединения, например, силового датчика регулирования, т.е. хомут 43 соединяется с тягой 44 (фиг.2) силового датчика регулирования.
Золотник 4 управления и валик 22 в корпусе 1 регулятора установлен с возможностью вращения, а также г. возможностью осевого перемещения Рукояткой 23 управления можно установить золотник 4 в одно из трех положений (режимов) среднее Режим регулятора (в этом положении золотник 4 управления соединяет канал 17 с каналом 45 и перекрывает каналы 14,8,11 и 12 (фиг.3-5 и 7); левое (по чертежу) Режим подъема (в этом положении золотник 4 управления соединяет канал 14 с каналом 17, а канал 12 - с полостью 25, которая соединена со сливом, и перекрывает каналы 45 и 8 (фиг.6); правое (по чертежу) Режим опускания (в этом положении золотник 4 соединяет каналы 8, 17 и 11 с каналом 45 и перекрывает канал 14 (фиг.1).
В ходе эксплуатации в зависимости от характера местности и от заданных агротехнических требований выполнения операции выбирают один из видов регулирования или их комбинацию.
Для позиционного регулирования положение навесного орудия (машины) муфту 34 жестко соединяют (при помощи рукоятки 35) с рычагом 33, который кинематически соединен с позиционным датчиком регулирования, а муфту 40 жестко соединяют (при помощи рукоятки 41) с корпусом 1 регулятора (фиг. 1). При изменении положения навесного орудия позиционный датчик регулирования поворачивает рычаг 33. который передает вращение на валик 19. При этом валик 22 остается неподвижным, и поворот валика 19 вызывает изменение положения золотника 5 регулирования регулятора, воздействующего на гидроцилиндр для восстановления первоначального заданного положения орудия.
Для силового регулирования положения навесного орудия муфту 40 жестко соединяют (с помощью рукоятки 41) с рычагом 39, который кинематически соединен с силовым датчиком регулирования, а муфту 34 жестко соединяют (с помощью рукоятки 35) с корпусом 1 регулятора (фиг.З). При изменении тягового сопротивления орудия (например, возрастание) пружина 46 силового датчика (фиг.2) сжимается, и рычаг 47, воздействуя через тягу 44, поворачиваем рычаг 39, который передает вращение на валик 22 и золотник 4. При этом валик 19 остается неподвижным и поворот золотника 45 изменяет положение золотника 5 регулирования регулятора. Коррекция от золотника 5 на гидроцилиндр механизма навески приводит к приподнятию навесного орудия из почвы и восстановлению пеовонзчально заданного положения регулятора усипия,
Для смешанного (силового позиционного) регулирования положения наносного орудия муфту 34 при помощи рукоятки 35 жестко соединяют с рычагом 33, который
кинематически соединен с позиционным датчиком регулирования, а муфту 40 жестко соединяют (рукояткой 41) с рычагом 39, который кинематически соединен с. силовым датчиком регулирования (фиг.4). При изме0 нении положения навесного орудия и соответственном измененнии тягового сопротивления орудия позиционный датчик регулирования поворачивает рычаг 33, который передает вращение на вялик 19, а сило5 вой датчик регулирования поворачивает в противоположное направление рычаг 39, который передает вращение на валик 22 и золотник 4. Повороты валикоп 19 и 22 вызывают суммированное изменение положения
0 золотника 5 регулирования регулятора, воздействующего на гидроцилиндр для восстановления первоначального заданного положения орудия (повороты валикоп 19 и 22 в противоположном направлении вызы5 вают перемещения золотника 5 в одну сторону).
При срабатывании одного из датчиков и повороте соответствующею ему рычага 33 или 39 соответствующий валик 19 или 22
0 г прсмещает золотник 5 регулирования регулятора. Коррекция давления от золотника 5 регулятора (механизма навески) на гидроцилиндр вызывает изменение положения ме- ханилма навески (подъем или опускание) и
5 срабатывание второго датчика что приводит к перемещению золотника 5 регулятора в обратном направлении, т.е к прекращению коррекции давления в гидроцилиндре. Таким образом, коррекция золотника 5 ре0 гулятора на гидроцилиндр механизма навески от одного из датчиков регулирования ограничивается действием второго датчика регулирования,
Преобладание соответствующего сиг5 нала (позиционного или силового регулирования) устанавливаетсяпутем
передвижения соответствующего хомута 37
или 43 на соответствующий рычаг 33 или 39.
Регулятор может быть использован в
0 сельскохозяйственном тракторе имеющем датчики регулирования (фиг.2) и гидросистему, включающую бак 48 (фиг 3). гидронасос 49, распределитель 50 с перепускным клапаном 51 и каналом 52 управления перепу5 скного клапана, и гидроцилиндр 53 для управления навесным механизмом трактора. При этом гидронасос 49 соединен всасывающей магистралью 54 с блюм 48, а нагнетательной магистралью 55 г регулятором и распределителем г 0 t лнлп 52 управления распределителя соединен магистралью 56 с каналом 15 управления регулятора. Гидроцилиндр 53 подсоединен к регулятору, т.е. штоковая (подъема) полость 57 магистралью 58 соединена с магистральным каналом 6 регулятора, а поршневая полость 59 магистралью 60 соединена с магистральным каналом 9 регулятора. Канал 18 слива регулятора и полость 61 распределителя соединены магистралью 62 с баком 48 через фильтр 63.
Кроме того, гидросистема трактора может содержать гидроаккумулятор 64 с подвижным элементом 65. При этом рабочая полость 66 гидроаккумулятора 64 соединена магистралью 67 через кран 68 с магистральным каналом 6 регулятора.
Необходимо отметить, что при необходимости использовать высотное регулирование с увеличением сцепного веса тягу 69 датчика давления (гидроаккумулятора 64) необходимо соединять с хомутом 43 вместо тяги 44 силового датчика регулирования или с хомугом 37 вместо тяги 38 позиционного датчика регулирования.
Гидросистема сельскохозяйственного трактора с предложенным регулятором работает следующим образом.
Опускание сельскохозяйственного орудия осуществляют установкой золотника 4 управления регулятора в положение Опускание (фиг.1). В этом положении золотник 4 перекрывает канал 14 и выточкой 26 соединяет каналы 8, 17 и 11 с каналом 45, который, в данном случае, сообщается с полостью 25, соединенной со сливом, т.е. с баком 48 по каналу 18 и магистрали 62. При этом открывается перепускной клапан 51 распределителя, так как канал 52 управления сообщен со сливом, т.е. с баком 48 по магистрали 56, каналам 15 и 17, выточке 26, каналу 45, полости 25, каналам 18 и магистрали 62. В этом случае масло от гидронасоса 49 магистралью 55 поступает в распределитель 50, в котором через открытый перепускной клапан 51 поступает в полость 61, из которой магистралью 62 - в бак 48. Кроме того, часть масла на слив поступает через регулятор, т.е. из нагнетательной магистрали 55 масло поступает по каналу 14, а далее через приоткрытый регулировочный кран 2 и каналы 15, 17 и 45 в полость 25, которая соединена со сливом. Из штоковой (подъемной) полости 57 гидроцилиндра 53 масло вытесняется по магистрали 58, каналам 6 и 8, выточке 26, каналу 45, полости 25, каналу 18 и магистрали 62 в бак 48. Орудие опускается. Опустив орудие до почвы, золотник 5 регулирования занимает положение, показанное на фиг,1 или близкое к нему, Уже
тогда золотник 4 управления можно устано- в.ить в положение регулятор (фиг.З). В этом положении золотник 4 управления перекрывает вытекание масла из штоковой полости
57 гидроцилиндра 53 по каналу 8. Тогда, пока орудие не опустилось до заданного рабочего положения, масло из штоковой полости 57 гидроцилиндра 53 вытесняется по магистрали 58, каналу 6, каналу 7 (проход
0 через управляемый клапан 13 открыт, так как канал 15 соединен со сливом), а далее через выточку 28 и канал 29 в золотнике 5 в полость25, из которой по каналу 18 и магистрали 62 в бак 48. Опускание орудия таким
5 путем происходит до тех пор, пока под воздействием датчиков регулирования золотник 5 не устанавливается в положение, при котором он отъединит свою кольцевую выточку 28 от канала 7. Когда орудие занимает
0 заданное рабочее положение, тогда золот- ник5 перекрывает канал 7(фигЗ.). При этом штоковая полость 57 гидроцилиндра 53 окажется запертой, и орудие поддерживается в заданном рабочем положении.
5Если затем положение сельскохозяйственного орудия изменяется, например глубина обработки почвы увеличивается, тогда датчики регулирования (через механизм передачи) перемещают золотник 5 вправо
0 (фиг.4). Тогда золотник 5 перекроет (частично или полностью в зависимости от изменения глубины) поступление масла на слив из Канала 45, После закрытия канала 17 закрывается перепускной клапан 51 распредели5 теля, при этом возрастает давление в нагнетательной магистрали 55, и масло поступает по каналу 14, далее через регулировочный кран 2 и обратный клапан 3 в канал 6, из которого магистралью 58 поступает в
0 штоковую полость 57 гидроцилиндра 53. Из противоположной полости (поршневой полости 59) гидроцилиндра 53 масло вытесняется по магистрали 60, каналу 10 в полость 25, которая соединена со сливом. В резуль5 тате орудие поднимается, и датчики регулирования (через механизм передачи) обратно устанавливают золотник 5 в нейтральное положение (фиг.З).
Необходимо отметить, что регулировоч0 ный кран 2 может быть прикрытым, и в ходе коррекции на подъем весь поток масла пройти не может. В этом случае в нагнетательной магистрали 55 до регулировочного крана 2 давление увеличивается больше,
5 чем в канале 15. Тогда открывается перепускной клапан 51 распределителя 50, и избыток масла направляется на слив через перепускной клапан 51 распределителя 50. Если глубина обработки почвы уменьшается, датчики регулирования подают сигнал в противоположную сторону, и золотник регулирования 5, переместившись влево (фиг.5), соединяет канал 7 с выточкой 28 золотника 5. Орудие опускается под действием своего веса. В этом случае из штоковой полости 57 гидроцилиндра 53 масло вытесняется на слив по магистрали 58, каналам 6 и 7, выточке 28, каналу 29 в полость 25, которая каналом 18 и магистралью 62 соединена с баком 48. После заглубления рабочих органов до заданного рабочего значения датчики регулирования опять устанавливают золотник 5 регулирования в нейтральное положение (фиг.З).
В конце гона или для поднятия орудия в транспортное положение золотник 4 устанавливают в положение Подъем (фиг.6). В этом положении золотник 4 перекрывает канал 8, соединяет канал 14 с каналом 17, а канал 12 соединяете полостью 25. При этом управляемый клапан 13 перекрывает канал 7, а также закрывается перепускной клапан 51 распределителя, так как канал 52 управления распределителя 50, канал 15 управления регулятора в этом случае отделены от слива. В данном случае масло от гидронасоса 49 по нагнетательной магистрали 55, каналу 14, выточке 26, каналам 17 и 15, через обратный клапан 3, каналу 6 и магистрали 58 поступает в штоковую полость 57 гидроцилиндра 53. Орудие поднимается. Из противоположной (поршневой) полости 59 гидроцилиндра масло вытесняется по магистрали 60, каналам 9 и 12 в полость 25, которая каналом 18 и магистралью 62 соединена с баком 48. Подняв орудие в транспортное положение, золотник 4 управления устанавливают в положение Регулятор (фиг.7). В транспортном положении агрегата золотник 5 занимает крайнее левое (или близкое к этому) положение. При этом што- ковая 57 и поршневая 59 полости гидроцилиндра 53 окажутся отделенными от слива золотниками 4 и 5 регулятора. Масло от гидронасоса 49 поступает магистралью 55 в распределитель 50, из которого через открытый перепускной клапан 51 поступает в полость 61, из которой магистралью 62 в бак 48. Перепускной клапан 51 открыт, так как канал 52 управления сообщен со сливом, т.е. с баком 48, по магистрали 56, каналам 15 и 17, выточке 26, каналу 45, полости 25. каналу 18 и магистрали 62.
При работе гидросистемы в режиме высотного регулирования с увеличением сцепного веса тягу 69 датчика давления (гидроаккумулятора 64) необходимо кинематически соединять, например, с хомутом 37 (вместо тяги 38 позиционного датчика регулирования). Тогда муфту 34 жестко соединяют (при помощи рукоятки 35) с рычагом 33, а муфту 40 жестко соединяют (при помощи рукоятки 41) с корпусом 1 регулятора. Кроме того, открывают кран 68, т.е. соединяют рабочую полость 66 гидроаккумулятора 64 со штоковой полостью 57 гидроцилиндра 53. В этом случае положение подвижного элемента 65 характеризует давление в штоковой полости 57 гидроци0 линдра 53. В данном случае рукояткой 20 на секторе 32 задают давление в штоковой полости 57 гидроцилиндра 53. Заданное давление поддерживает регулятор гидросистемы. Регулятор работает анало5 гично, как и при силовом позиционном регулировании.
Когда автоматическое регулирование (регулятор) не используется, рукоятки 35 и 41 устанавливаются в среднее положение
0 или соединяются с корпусом 1 регулятора. В этом случае золотник 5 регулятора занимает крайнее левое положение и перекрывает каналы 10 и 7, а канал 45 остается открытым, т.е. соединенным с полостью 25
5 (фиг.7). Кроме того, в этом режиме целесообразно закрыть регулировочный кран 2. При этом золотником 4 управления управляют механизмом навески трактора, т е. управляют гидроцилиндром 53.
0Предложенное техническое решение
позволяет расширить функции регулятора путем создания возможности управления им гидроцилиндром механизма навески и расширить функции регулятора путем обес5 печения возможности его одновременной работы от двух различных датчиков регулирования, т.е. принимать одновременно действие сигналов от силового и позиционного датчиков регулирования и использовать их
0 в виде суммированного сигнала. При этом предложенное техническое решение позволяет упростить конструкцию устройства для управления и поддерживания в рабочем положении сельскохозяйственного орудия, аг5 регатируемого с трактором.
Формула изобретения Регулятор гидросистемы управления сельскохозяйственными орудиями, содержащий размещенные в корпусе регулировочный
0 кран, обратный клапан, гидравлически соединенные золотник управления и золотник регулирования, первый и ВТОРОЙ магистральные каналы, соединенные каналами с золотником управления и золотником регулирования,
5 управляемый клапан, установленный в канале, соединяющем первый магистральный канал с золотником регулирования, нагнетательный канал, через регулировочный кран и обратный клапан соединенный с первым магистральным каналом, канал управ
ления, соединенный с золотником управления и с полостью управления управляемого клапана, канал слива и валик, сопряженный резьбой с золотником регулирования, рукоятку настройки, которая соединена с валиком с возможностью его вращения, узел подсоединения датчика регулирования, соединенный шлицем с валиком и соединенный с корпусом с возможностью вращения, и рукоятку управления, отличаю щийся тем, что, с целью расширения функциональных возможностей регулятора, он снабжен вторым валиком, один конец которого соединен с рукояткой управления, а второй жестко соединен с золотником управления который расположен концентрично золотнику регу лирования и соединен с ним с возможностью осевого перемещения, и узлом
подсоединения второго датчика регулирования, соединенным шлицем с вторым валиком и соединенным с корпусом с возможностью вращения, при этом узлы подсоединения первого и второго датчиков
снабжены механизмом фиксации их относительно корпуса, нагнетательный канал дополнительно соединен с золотником управления, а выход регулировочного крана соединен с каналом управления
25 10 19 31 3 28 5 30 4 26 11 П 24
tx r
к cc
Csj 0-j Nj
/ /
o
B5 fe
JO W 32 lit;
7
H
5 3 30 4 11 12 25 22
Фиг.6
13 16 6 3 2 15 8
r
J5 10 5 31 9 25 30 4 11 12 22 2Ц
Фиг.7
X//Y//V / Л;
r
30 4 11 12 22


| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор гидросистемы управления сельскохозяйственными орудиями | 1990 |
|
SU1764533A1 |
| Регулятор гидросистемы управления положением рабочего органа сельскохозяйственной машины | 1989 |
|
SU1701135A1 |
| Гидросистема управления сельскохозяйственными орудиями | 1988 |
|
SU1618301A1 |
| Гидравлическая система управления сельскохозяйственными орудиями | 1988 |
|
SU1538909A2 |
| Гидросистема сельскохозяйственного трактора | 1989 |
|
SU1710869A1 |
| Гидросистема управления сельскохозяйственными орудиями | 1988 |
|
SU1706416A1 |
| Гидравлическая система управления сельскохозяйственными орудиями | 1986 |
|
SU1429959A1 |
| Гидросистема управления сельскохозяйственными орудиями | 1988 |
|
SU1643815A1 |
| Гидросистема управления сельскохозяйственными орудиями | 1989 |
|
SU1830431A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ НАВЕСНЫМИ ОРУДИЯМИ СЕЛЬСКОХОЗЯЙСТВЕННОГО ТРАКТОРА | 1970 |
|
SU280074A1 |


Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам для управления и автоматического регулирования рабочего положения навесных и полунавесных сель20 13 Ю 31 5 28 25 3 30 Ц ,Риг.1 скохозяйственных машин. Цель изобретения - расширение функциональных возможностей регулятора. В корпусе 1 регулятора размещены золотник управления 4 и золотник регулирования 5. С золотником регулирования 5 взаимодействует валик 19, взаимодействующий также с рукояткой настройки 20 и с узлом 21 подсоединения позиционного датчика регулирования. К золотнику управления 4 жестко прикреплен валик 22. взаимодействующий с рукояткой управления 23 и с узлом 24 подсоединения силового датчика регулирования. Предложенное техническое решение обеспечивает возможность работы регулятора от двух различных датчиков регулирования, что позволяет существенно расширить его функциональные возможности. 7 ил. +J Ё 23 О 00 4 00 ИЗ
| Гидравлическая система управления сельскохозяйственными орудиями | 1988 |
|
SU1538909A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
