Изобретение относится к сельскому хозяйству, а именно к сельскохозяйственному машиностроению, и может быть применено для автоматического регулирования глубины обработки почвы сельскохозяйственными орудиями.
Целью изобретения является расширение функциональных возможностей регулятора путем обеспечения его одновременной работы от силового и позиционного датчиков регулирования.
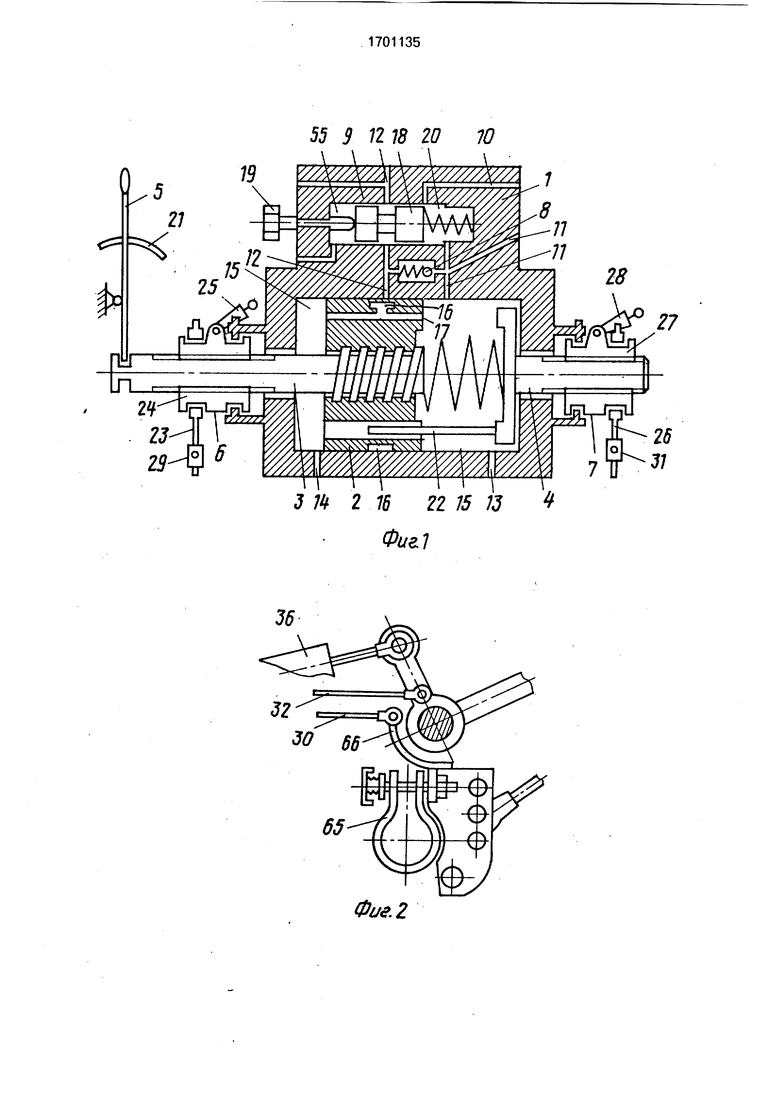
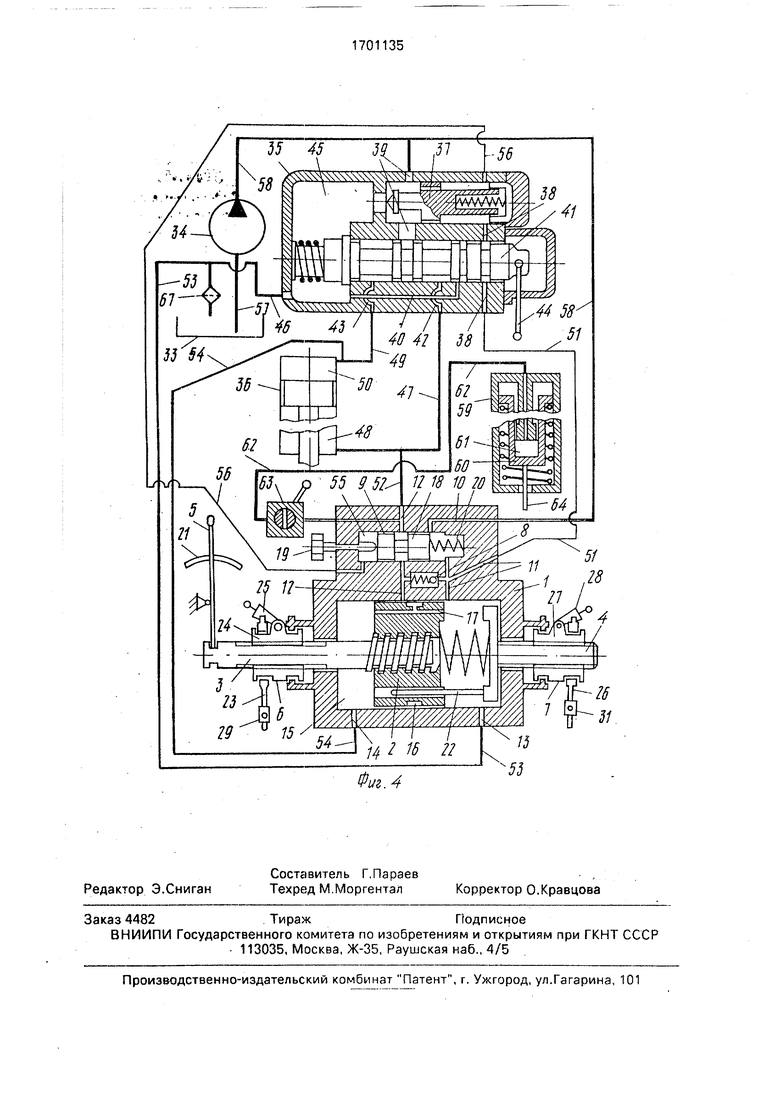
На фиг.1 представлена конструкция регулятора управления положением рабочего органа сельскохозяйственной машины; на фиг.2 - конструкция кинематической связи чувствительных элементов датчиков силового и позиционного регулирования с элементами конструкции регулятора; на фиг.З - схема конструктивной и гидравлической связей регулятора с гидросистемой сельхозмашины для управления положением рабочего органа; на фиг.4 - гидросистема при рабочем положении орудия.
Регулятор гидросистемы содержит размещенные в корпусе 1 распределитель мае-- ла, подпружиненный золотник 2 регулятора, вал 3 золотника регулятора и установочный вал 4 с диском на его внутреннем конце. Кроме того, регулятор содержит рукоятку Б для настройки (первоначальной установки вала 3 регулятора в осевом направлении), а также узлы 6 и 7 подсоединения силового и позиционного датчиков регулирования соответственно.
Распределитель масла регулятора включает обратный клапан 8, регулировочный клапан 9, каналы нагнетания 10, управления 11, регулирования 12, слива 13 и закрывания 14, и полость 15, в которой расположен золотник 2 регулятора. Золотник 2 регулятора имеет сообщенные между собой кольцевую выточку 16 и канал 17. Каналы 11-14 сообщены с полостью 15 так, чтобы золотник 2 регулятора имел возможности: перекрывать каналы 14 и 12, когда
каналы 11 и 13 сообщены между собой, сообщить между собой все четыре канала, перекрывать канал 12, когда каналы 14,11 и 13 сообщены между собой, и перекрывать каналы 12 и 11, когда каналы 14 и 13 сообщены
между собой.
Регулировочный клапан 9 содержит подпружиненный золотник 18 распределителя и винт 19 для опоры, Полость 20 пружины сообщена с каналами нагнетания 10 и управления 11. Канал 11 управления сообщен с каналом 12 регулирования через обратный клапан 8. Кроме того, золотник 18 регулировочного клапана выполнен с возможностью последовательно перекрывать каналы нагнетания 10 и регулирования 12.
При этом имеется возможность с помощью винта 19 регулировать приоткрывание канала 10 нагнетания, когда канал 12 регулирования полностью открыт.
Первый вал 3 золотника регулятора расположен в корпусе 1 с возможностью вращения и сопряжен резьбой с золотником 2 регулятора. Конец валика 3 соединен с рукояткой 5 настройки. Рукоятка 5 фиксируется на секторе 21 и поддерживает вал З.в
заданном положении (относительно осевого передвижения), но при этом вал 3 имеет возможность поворачиваться. Второй установочный вал 4 расположен в корпусе 1 также с возможностью вращения и соединен с золотником 2 регулятора с возможностью осевого передвижения последнего, т.е. вал 4, соединен с золотником 2 через соединительный штифт 22, конец которого жестко прикреплен к валу 4, а сам штифт 22 расположен в отверстии, высверленном в золот- нике 2. Таким образом, золотник 2 регулятора, вал 3 и вал 4 размещены в корпусе 1 концентрично, а штифт 22 вынесен от центра.
Узел 6 подсоединения первого датчика регулирования состоит из рычага 23, связанного с первой муфтой 24, снабженной рукояткой 25. Муфта 24 соединена шлицем с валом 3 и соединена с корпусом 1 с возможностью вращения. Таким образом, в мо- мент движения вала 3 по осевому направлению муфта 24 остается на месте, а при вращении вала 3 вращается с ним. Рычаг 23 свободно посажен на муфте 24. Рукоятка 25 предусмотрена для соединения рычага 23 с муфтой 24 и для фиксации муфты относительно корпуса 1 (т.е. для фиксации муфты 24 от вращения).
Узел 7 подсоединения второго датчика регулирования состоит из рычага 26, свя- занного с второй муфтой 27, снабженной рукояткой 28. Муфта 27 соединена шлицем с валом 4 и соединена с корпусом с возможностью вращения. Рычаг 26 свободно посажен на муфте 27. Рукоятка 28 предусмотрена для соединения рычага 26 с муфтой 27 и для фиксации муфты относительно корпуса 1 (т.е. для фиксации муфты 27 от вращения). Рычаг 23 снабжен пере- движным (вдоль его оси) хомутом 29 для подсоединения силового датчика регулирования (т.е. хомут 29 соединяется с тягой 30 (фиг.2) силового датчика регулирования). Рычаг 26 снабжен передвижным (вдоль его оси) хомутом 31 для подсоединения позици- онного датчика регулирования (т.е. хомут 31 соединяется с тягой 32 (фиг.2) позиционного датчика регулирования).
Регулятор может быть использован, например, в сельскохозяйственном тракторе, имеющем датчики регулирования (фиг.2) и гидросистему управления рабочим органом. Последняя включает бак 33 (фиг.З), гидронасос 34, распределитель 35 и гидроцилиндр 36 для управления навесным механизмом трактора.
Распределитель 35 гидросистемы трактора содержит перепускной клапан 37, канал 38 управления перепускным клапаном 37, канал 39 нагнетания, канал 40 слива и
золотник 41(для управления гидроцилиндром 36) с каналами подьема 42 и опускания 43 (другие золотники и предохранительный клапан не показаны). Золотник 41 управляется рукояткой 44. Канал 40 слива сообщен с полостью 45, которая гидромагистралью 46 сообщена с баком 33. Канал 42 подъема сообщен гидромагистралью 47 со штоковой (подьема) полостью 48 гидроцилиндра 36. Канал 43 опускания сообщен- гидромагистралью 49 с поршневой полостью 50 гидроцилиндра 36. Канал 38.управления перепускного клапана сообщен гидромагистралью 51 с каналом 11 управления регулятора. Канал 12 регулирования регулятора сообщен гидромагистралью 52 со штоковой полостью 48 гидроцилиндра 36. Канал 13 слива регулятора сообщен гидромагист- ралыо 53 с баком 33. Канал 14 закрывания регулятора сообщен гидромагистралью 54 с поршневой полостью 50 гидроцйлиндра 36. Полость 55 регулировочного клапана 9 сообщена гидромагистралью 56 с началом канала 38 управления перепускного клапана 37 распределителя 35.
Гидронасос 34 соединен всасывающей магистралью 57 с баком 33, а нагнетательной магистралью 58 - с каналом 39 нагнетания распределителя 35 и с каналом 10 нагнетания регулятора.
Кроме того, гидросистема трактора может содержать гидроаккумулятор 59 с подвижным элементом 60, который может выполнять функции датчика давления при высотном регулировании с увеличением сцепного веса функции (силового или позиционного датчиков). При этом рабочая полость 61 гидроаккумулятора 59 соединена магистралью 62 через кран 63 с каналом 12 регулирования регулятора. При необходимости использовать высотное регулирование с увеличением сцепного веса тягу 64 датчика давления (гидроаккумулятора 59) необходимо соединять с хомутом 31 вместо тяги 32 позиционного датчика регулирования или с хомутом 29 вместо тяги 30 силового датчика регулирования.
Регулятор гидросистемы работает следующим образом.
В зависимости от характера местности и от заданных агротехнических требований выполнения операции выбирают следующие виды регулирования или их комбинацию.
Для позиционного регулирования положения навесного орудия машины муфту 27 жестко соединяют с помощью рукоятки 28 с рычагом 26, который кинематически соединен с позиционным датчиком регулирования, а муфту 24 жестко соединяют при
помощи рукоятки 25 с корпусом I регуляю- ра(фиг.1). При изменении положения навесного орудия позиционный датчик регулирования поворачивает рычаг 26, который передает вращение валу 4. При этом вал 3 остается неподвижным, а поворот вала 4 вызывает изменение положения золотника 2 регулирования, воздействующего на гидроцилиндр 36 для восстановления первоначального заданного положения орудия.
Для силового регулирования положения навесного орудия муфту 24 жестко сое- , диняют при помощи рукоятхм 25 с рычагом 23, который кинематически соединен с силовым датчиком регулирования, а муфту 27 жестко соединяют при помощи рукоятки 28 с корпусом 1 регулятора. При изменении 1 тягового сопротивления орудия, например при его возрастании, пружина 65 с-ллового датчика (фиг.2) сжимается, и рычаг 66, воздействуя через тягу 30, поворачивает рычаг 23, который передает вращение валу 3. При этом вал 4 остается неподвижным, а поворот вала 3 изменяет положение зоютнмка 2 регулятора. Коррекция от золотника 2 на гидроцилиндр 36 приводит к выглублению навесного орудия из почвы и восстановлению первоначального заданного положения регулятора усилия.
Для смешанного силового и позиционного регулирования положения навесного орудия муфту 27 жестко соединяют при помощи рукоятки 28 с рычагом 26, который кинематически соединен с позиционным датчиком регулирования, а муфту 24 жестко, при помощи рукоятки 25, соединяют с рычагом 23, который кинематически соединен с силовым датчиком регулирования (фмг.З). При изменении положения навесного орудия и соответственном изменении тягового сопротивления орудия позиционный датчик регулирования поворачивает рычаг 26, который передает вращение валу 4, а силовой датчик регулирования поворачивает в противоположное направление рычаг 23, который передает вращение аалу 3, Повороты валов 4 и 3 вызывают суммарное изменение положения золотника 2 регулятора, воздействующего на гидроцилиндр для восстанов- ления первоначального заданного положения орудия. При этом повороты валов 3 и 4 в противоположные направления вызывают перемещение золотника 2 э одну сторону.
При срабатывании одного из да гчиков и повороте соответствующего ему рычага 23 м 26 соответствующий вал 3 или 4 перемещает золотник 2 регулирования оегулятора Коррекция давления от зологник 2 регулятора на гидроцилиндр 36 вызывает изменение положения механизма навески (подъем или опускание) и срабатывание второго датчика, что приводит к перемещению золотника 2 регулятора в обратном направлении,
т.е. к прекращению коррекции давления в гидроиилиндре. Таким образом, коррекция золотника 2 регулятора на гидроцилиндр 36 механизма навески от одного из датчиков регулирования ограничивается действием
0 второго датчика регулирования.
Преобладание соответствующего сигнала, позиционного или силового регулирования, устанавливается путем изменения положения (передвижения) соответствую5 щего хомутз 29 или 31 на соответствующем рычаге.
Гидросистема сельскохозяйственного трактора в совокупности с предлагаемым регулятором работает следующим образом.
0 Перед началом работы регулятор устанавливают в положение, соответствующее выбранному виду регулирования, и рукояткой 5 на секторе 21 задают глубину обработки почвы.
5Опускание сельскохозяйственного орудия осуществляют при установке золотника 41 распределителя гидросистемы трактора в положение опускание (фиг.З). В этом положении золотник 41 перекрывает канал 38
0 управления, при этом перепускной клапан 37 будет закрытым, открывает доступ масла мз канала 39 нагнетания в канал 43 опускания, а канал 42 подъема соединяет с каналом 40 слива. При этом золотник 18
5 распределителя регулировочного клапана 9 передвигается вправо (так как полость 20 сообщена со сливом, а полость 55 - с нагнетательной магистралью) и перекрывает канал 10 нагнетания и канал 12 регулирования
0 регулятора. При этом масло от гидронасоса 34 поступает по нагнетательной магистрали 58, каналам 39 и 43 распределителя, магистрали 49 в поршневую полость 50 гидроцилиндра 36, Из штоковой (подъемной)
5 полости 48 гидроцилиндра масло вытесняется по магистрали 47, каналам 42 и 40 в полость 45 распределителя, которая соединена магистралью 46 с баком 33. Орудие (рабочий орган) опускается.
0 Опустив сельскохозяйственное орудие до почвы, золотник 2 регулирования регулятора занимает положение, показанное на фиг. I (или близкое этому). После этого золотник 41 можно устанавливать в нейтраль5 нее положение. При этом открывается перепускной клапан 37 распределителя гидросистемы трактора, так как канал 38 управления сообщен по магистрали 51, каналу 11, полости 15, каналу 13 и магистрали 53 с
Ьаком 33, т.е. со сливом, Золотник 18 регулировочного клапана под действием пружины передвигается влево до опорного винта
19,так как полости 20 и 55 соединяются между собой через магистраль 56, канал 38, магистраль 51 и канал 11. В этом случае масло из гидронасоса 34 поступает магистралью 58 в распределитель 35, в котором через открытый перепускной клапан 37 поступает в полость 45, из которой магистралью 46 - в бак 33. Кроме того, соответственная часть масла на слив поступает вторым потоком через регулятор, т.е. из нагнетательной магистрали 58 масло поступает через приоткрытый канал 10 в полость 20, которая соединена с полостью 15 слива через канал 11. При этом, пока сельскохозяйственное орудие не опустилось до заданного положения, масло из штоковой полости 48 гидроцилиндра 36 вытесняется под действием веса орудия. Из штоковой полости 48 масло вытесняется по магистрали 52, каналу 12 регулирования, далее через выточку 16 (фиг.1) и канал 17 в золотнике 2 - в полость 15, из которой по каналу 13 и магистрали 53 поступает в бак 33. При опускании гидроцилиндра 36 под действием силы тяжести орудия в поршневую полость масло попадает из сливной магистрали, так как в сливной магистрали небольшое давление создается масленным фильтром 67. Опускание орудия регулятором происходит до тех пор, пока под воздействием датчиков регулирования золотник 2 не устанавливается в положение, при котором он отъединит свою кольцевую выточку 16 от канала 12. Когда орудие занимает заданное (рабочее) положение, тогда золотник 2 перекрывает канал 12 регулирования. При этом штоковая полость 48 гидроцилиндра 36 окажется запертой, и орудие поддерживается в заданном (рабочем) положении.
Если затем положение сельскохозяйственного орудия (рабочего органа машины) изменяется, например, глубина обработки почвы увеличивается, тогда датчики регулирования (через механизмы передачи) перемещают золотник 2 вправо. При этом золотник 2 перекроет (частично или полностью, в зависимости от изменения глубины рабочего органа) поступление масла на слив из канала 11. После закрытия канала 11 закрывается перепускной клапан 37 распределителя гидросистемы трактора, тогда возрастает давление в нагнетательной магистрали и масло из нагнетательной магистрали 58 поступает через канал 10, полость
20,канал 11 и далее через обратный клапан 8 в канал 12, из которого поступает через магистраль 52 в штоковую полость 48 гидроцилиндра 36. Из противоположной (поршневой) полости 50 гидроцилиндра масло вытесняется поршнем по магистрали 54, каналу 14, полости 15, каналу 13 и магистрали 53 в бак 33. В результате орудие поднимается, 5 и датчики регулирования через механизмы передачи обратно устанавливают золотник 2 в нейтральное положение.
Так как в ходе коррекции на подъем канал 10 прикрыт золотником 18 и весь по10 ток масла пройти не может, в этом случае в магистрали до золотника 18 давление увеличивается больше, чем в магистрали за золотником 18, поэтому открывается перепускной клапан 37, и избыток масла
15 направляется на слив через перепускной клапан 37 распределителя 35. При этом винтом 19 регулируют скорость коррекции, т.е. чувствительность работы регулятора: чем больше закрыт канал 10 золотником 18, тем
0 больше масла сливается в бак через перепускной клапан 37 распределителя 35, и тем меньше скорость подъема орудия при коррекции.
Если глубина обработки почвы умень5 шается, тогда датчики регулирования подают сигнал в противоположную сторону, и золотник 2 регулирования, переместившись влево, соединяет канал 12 с выточкой 16 золотника 2. Орудие опускается под дейст0 вием своего веса. В этом случае из штоковой полости 48 гидроцилиндра 36 масло вытесняется на слив по магистрали 52, каналу 12, выточке 16, каналу 17, полости 15, каналу 13 и магистрали 53. После заглубления рабочих
5 органов до заданного значения датчика регулирования опять устанавливают золотник 2 регулирования в нейтральное положение. В конце гона для поднятия орудия в транспортное положение золотник 41 рас0 пределителя устанавливают рукояткой 44 в положение подъем (крайнее левое положение). В этом положении золотник 41 перекрывает канал 38 управления (при этом перепускной клапан 37 будет закрыт), от5 крывает доступ масла из нагнетательного канала 39 в канал 42 подъема, а канал 43 опускания соединяет с полостью 45 слива. При этом золотник 18 регулировочного клапана 9 передвигается вправо (так как по0 лость 20 остается соединенной со сливом, а полость 55 - с нагнетательной магистралью) и перекрывает каналы нагнетания 10 и регулирования 12 регулятора. В этом случае масло от гидронасоса 34 поступает по
5 нагнетательной магистрали 58, каналам 39 и 42 распределителя, магистрали 47 в штоковую полость 48 гидроцилиндра 36. Из противоположной полости (поршневой полости 50) гидроцилиндра 36 масло вытесняется поршнем по магистрали 49, каналу 43 опуекания в полость 45, которая магистралью 46 сообщена с баком 33 Подняв орудие в транспортное положение, зояотиих 41 распределителя 35 рукояткой 44 устанавливается в нейтральное положение (среднее положение золотника 41). В транспортное положении агрегатз золотник 2 регулятора занимает крайнее левое положение или близкое к этому (см.фиг.З). При этом штоко- вая полость 48 и поршневая полость 50 гмд- роцилиндра 36 окажутся отъединенными от сливных и нагнетательных магистралей золотником 41 распределителя и золотником 2 регулятора.
При работе гидросистемы а режиме высотного регулирования с увеличением сцеп- ного веса тягу 64 датчика давления (гидроаккумулятора 59) необходимо кинематически соединять, например, с хомутом 31 (вместо тяги 32 позиционного датчике регулирования). Тогда муфту 24 жестко соединяют при помощи рукоятки 25 с корпусом 1 регулятора, Кроме того, открывают кран 63, т.е. соединяют рабочую полость 61 гидроаккумулятора 59 со штоковой полостью 48 гидроцилиндра 36. В этом случае положение подвижного элемента 60 характеризует давление в штоковой полости 48 гидроцм- линдра 36. При этом рукояткой 5 на секторе 21 задают давление в штоковой полости 48 гидроцилиндра 36. Заданное давление поддерживает регулятор гидросистемы.
Когда автоматическое регулирование (регулятор) не используется, рукоятки 25 щ 28 устанавливают в среднем положении или соединяют с корпусом 1 регулятора. В этом случае золотник 2 регулятора занимает крайнее левое положением перекрывает каналы 12 и 14, а канал 11 управлений остается открытым, т.е, соединенным со сливной магистралью 53 через полость 15м канал 13.
Предлагаемое техническое решение позволяет расширять функции регулятора гидросистемы путем обеспечения возможности его одновременной работы от двух различных датчиков регулирования, т.е. позволяет принять одновременно действие сигналов от силового и позиционного датчиков регулирования, используя их суммарный сигнал.
Детали предлагаемого регулятора одновременно выполняют функции регулятора и функции смесителя сигналов датчиков регулирования. Такое решение позволяет упростить конструкцию устройства для автоматического регулирования глубины обработки почвы сельскохозяйственными орудиями.
Формула изобретения
1.Регулятор гидросистемы управления положением рабочего органа сельскохозяйственной машины, содержащий корпус с каналами нагнетания, слива, управления и регулирования, установленный на корпусе распределитель масла, полости которого связаны с каналами регулирования, нагнетания и управления с возможностью их перзхрьлмя по/зпружиненным золотником распределителя масла, подпружиненный золотник регулятора, установленный в кор- пусэ последнего с возможностью перекрытия каналов нагнетания, регулирования и
управления в корпусе регулятора, вал золотника регулятора, связанный с последним резьбовым соединением и снабженный рукояткой для обеспечения возможности осевой установки вала золотника, первую
муфту, установленную в корпусе регулятора с возможностью вращения соосно с валом золотника регулятора и связанную с последним шлицевым соединением, и узел подсоединения силового датчика регулирования,
кинематически связанный с первой муфтой, отличающийся тем, что, с целью /расширения функциональных возможностей регулятора путем обеспечения его од- новрем«энной работы от силового и
позиционного датчиков регулирования, регулятор снабжен установочным валом с диском для опоры пружины золотника регулятора, установленным в корпусе с возможностью вращения, второй муфтой, устапозленной а корпусе регулятора с возможностью вращения соосно с установочным залом и связанной с последним шлицевьзм соединением, узлом подсоединения позиционного датчика регулирования, кинематически связанным с второй муфтой, и фиксаторами первой и второй муфт, выполненными в виде их рукояток, шарнирно связанных с обеими муфтами для установки последних в осевом направле5 нии, при этом золотник регулятора установлен с возможностью вращения относительно корпуса с возможностью осевого перемещения относительно соединительного штифта, расположенного на диске
0 для опоры его пружины.
2.Регулятор по п.1, от л и ч а ю щ и и с я тег, что узел подсоединения каждого из датчиков вьполнен в виде рычагов, кинематически связанных с соответствующей
5 муфтой, и хомуте, установленного на рычаге с возможностью его перестановки и кинематически связанного с чувствительным элементом соответствующего датчика регулирования.
55 9 72 18 20 70
Ж/ЖЩ
29
3 т 2 W 22 15 13 Фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидросистема управления сельскохозяйственными орудиями | 1988 |
|
SU1618301A1 |
| Регулятор гидросистемы управления сельскохозяйственными орудиями | 1990 |
|
SU1764533A1 |
| Гидравлическая система управления сельскохозяйственными орудиями | 1988 |
|
SU1538909A2 |
| Гидросистема сельскохозяйственного трактора | 1989 |
|
SU1710869A1 |
| Регулятор гидросистемы управления сельскохозяйственными орудиями | 1989 |
|
SU1681748A1 |
| Гидросистема управления сельскохозяйственными орудиями | 1988 |
|
SU1706416A1 |
| Гидравлическая система управления сельскохозяйственными орудиями | 1986 |
|
SU1429959A1 |
| Гидравлическая система управления навесными сельскохозяйственными орудиями | 1973 |
|
SU441880A1 |
| Гидросистема управления сельскохозяйственными орудиями | 1988 |
|
SU1643815A1 |
| Гидравлическая система управления навесными сельскохозяйственными орудиями | 1975 |
|
SU668636A1 |
Изобретение относится к сельскому хозяйству, а именно к сельскохозяйственному машиностроению, и может быть использовано для автоматического регулирования глубины обработки почвы сельскохозяйственными орудиями. Цель изобретения - расширение функциональных возможностей регулятора путем обеспечения его од- новременной работы от силового и позиционного датчиков регулирования. Регулятор гидросистемы управления положениемрабочегооргана сельскохозяйственной машины содержит размещенный в корпусе 1 подпружиненный золотник 2 регулятора, установленный с возможностью перекрытия каналов управления 11 и регулирования 12 распределите
65
Фи$.2
Фаг 4
| Гидросистема управления сельскохозяйственными орудиями | 1988 |
|
SU1618301A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
