Фиг. I
Изобретение относится к пневмоавтоматике и может быть использовано в системах управления промышленных роботов и летательных аппаратов.
Целью изобретения является повышение точности и устойчивости.
На фиг.1 изображена схема пневматического привода; на фиг.2 - схема блока формирования; на фиг.З и 4 - графики отработки синусоидальных входных сигналов в Известном и предлагаемом приводах соответственно; на фиг.5 и 6 - логарифмические амплитудно-частотные характеристики известного и предлагаемого приводов соответственно.
Пневматический привод содержит за- датчик 1 входного сигнала, датчик 2 выходного сигнала привода, выходы которых подсоединены к сравнивающему элементу 3, имеющему выход, который соединен с каналом из последовательно соединенных блока 4 двойного реального дифференцирования, блока 5 определения модуля и первого блока 6 формирования, а также через последовательно соединенные первый 7 и второй 8 блоки типа апериодическое звено, подключен к входам первого 6, второго 9, третьего 10, четвертого 11 и пятого 12 блоков формирования и соединен с входом первого сумматора 13.
Первые входы блоков 9-12 параллельно соединены с первым входом блока 6 фор- мирования. Выходы блоков 9 и 10 формирования подсоединены к вычитателю 14, а выходы блоков 11 и 12 формирования подсоединены к вычитателю 15. Выход вы- читателя 14 подключен к входу первого усилителя 16, а выход вычитателя 15 - к входу второго усилителя 17. Выходы усилителей 16 и 17, а также выход блока 6 формирования подключены к второму сумматору 18, выход которого подключен к входу третьего усилителя 19. Выход последнего соединен с вторым входом сумматора 13, выход которого подключен к усилителю-преобразовате- лю 20 сигнала управления, Выход усилителя-преобразователя 20 подключен к пневматическому распределительному устройству 21, причем второй вход пневматического распределительного устройства 21 соединен с выходом источника 22 рабочей среды, а выход пневматического распределительного устройства 21 подключен к входу пневмодвигателя 23.
Каждый блок формирования содержит входные усилители 24 и 25, выходы которых подключены к входам вычитателя 26 и сумматора 27. Выход вычитателя 26 подсоединен к входу блока 28 определения модуля, а выход сумматора 27 подсоединен к входу
блока 29 определения модуля, Выходы блоков 28 и 29 определения модуля подключены к входам вычитателя 30. Выход вычитателя 30 является выходом блока формирования. Блоки и элементы системы управления привода могут быть выполнены как аналоговыми, так и дискретными.
Пневматический привод работает следующим образом.
Входной сигнал Хзад Xi задатчика 1 элементом 3 сравнивается с сигналом Хтек Х2 датчика 2, и далее полученная разность в виде сигнала
ХзадМ - ХтекМ Xi - Х2 X3(t)
поступает на входы блоков 4 и 7. На выходе блока 4 формируется сигнал
20
х х3 s)2 , )2,
(TS + 1)2
5
0
1
где Хз Хз , ,
(TS+1)2
Т - постоянная времени блока 4; S - оператор Лапласа. На выходе блока 5 имеется сигнал
Х5 1Хд1 . на выходе блока 7 - сигнал
Х7- Хз
7 Т S + 1 а на выходе блока 8 - сигнал
Х8
X Хз
Х3 ,
TS + 1 (TS -M) где Т - постоянная времени блоков 7 и 8, 5 равная постоянной времени блока 4.
На выходе блока 6 формируется сигнал
0
Х6 |Хз --Ц|Х41|- |Хз +-Ц|Х41 ли I I/жi
«1
UJ1
|-К+ I/MI I
1
Усиление сигнала Xs на величину г происходит при прохождении его через
сог
усилитель 24, где частотный параметр од выбирается немного меньше частоты пневмомеханического резонанса, т.е. . где бОпм -частота пневмомеханического резонанса. Блоки 6, 9 - 12 конструктивно идентичны и отличаются только настройкой усилителей 24 и 25 на входе в эти блоки. На выходе блока 9 формируется сигнал
Хд- |о&2Хз -Х51 + Xsl . где йЈ - частотный параметр, несколько больший частоты пневмомеханического резонанса, т.е. ал Ј0пм . На выходе блока 10 формируется сигнал
Хю luJ32X3 -X5l - + X5I . где частотный параметр саз йЈ. На выходе блока 11 формируется сигнал
Xii IXs-ft 2 1Х5+ ом2 . где частотный параметр ом выбирается несколько меньшим частоты высокочастотного резонанса, т.е. аи о%.р. , где ufe.p. - частота высокочастотного резонанса привода.
На выходе блока 12 формируется сигнал
Х12 I X5 0)5 2 Х3 I - I Х5 + 0)5 2 Х3 I,
где частотный параметр йЈ соответствует частоте высокочастотного резонанса, т.е.
Ш5 Нв.р.
На выходе вычитателя 14 сигнал разности равен
Х14 Х9 - ХЮ,
а на выходе вычитателя 15 сигнал разности равен
Х15 Х11-Х12.
Тогда на выходе усилителя 16 получается сигнал
1
ХиXu,
(сиз 2 - (to.2) а на выходе усилителя 17 - сигнал
Хп -g2- Xis.
(Ш5 - ftM )
На выходе сумматора 18 сигнал суммы равен
ХГ8 Х6 + Xl6 + Х17.
На выходе усилителя 19 получается сигнал
X19 |X18.
)i
1X3
2 +
0
причем умножение в усилителе 19 на К 0,5 является необходимым и вынесено в отдельный усилитель с целью достаточно точного умножения с возможностью подстройки.
На выходе сумматора 13 сигнал суммы равен
Х13-Х19 + ХЗ.
Таким образом, сигнал, поступающий на усилитель-преобразователь 20 привода, имеет вид
(х) (|Хз -4ix3 l|22
шз -аъ
{(|ад2хз
- + -(|шз2хз + 1
I |шз2хз +1хз
)}
99
ft)5 - ЙЧ
х J(|lX3 l-OM2X3 |- |lX3 l-ftM2X3)- - (11 ХЗ I - О 2 ХЗ I - 11 ХЗ I + UJ5 2 ХЗ j|.
0
5
0
5
0
5
0
5
0
5
Такое преобразование входного сигнала системой управления дает возможность в широком диапазоне варьировать коэффициент усиления усилителя-преобразователя
20привода, позволяя значительно поднять добротность привода и, как следствие, его статическую точность.
Сигнал, поступивший на усилитель-преобразователь 20 и далее через устройство
21в пневмодвигатель 23, вызывает движение последнего и, в конечном счете, сведение к нулю сигнала Хз на выходе элемента 3.
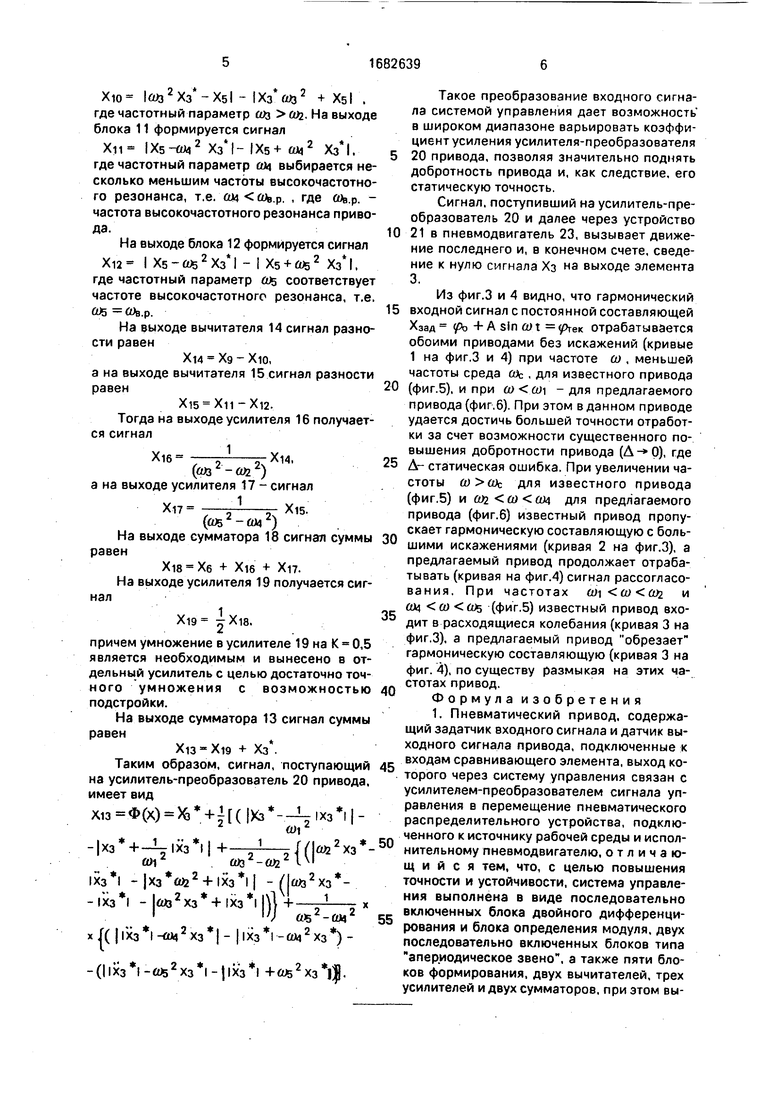
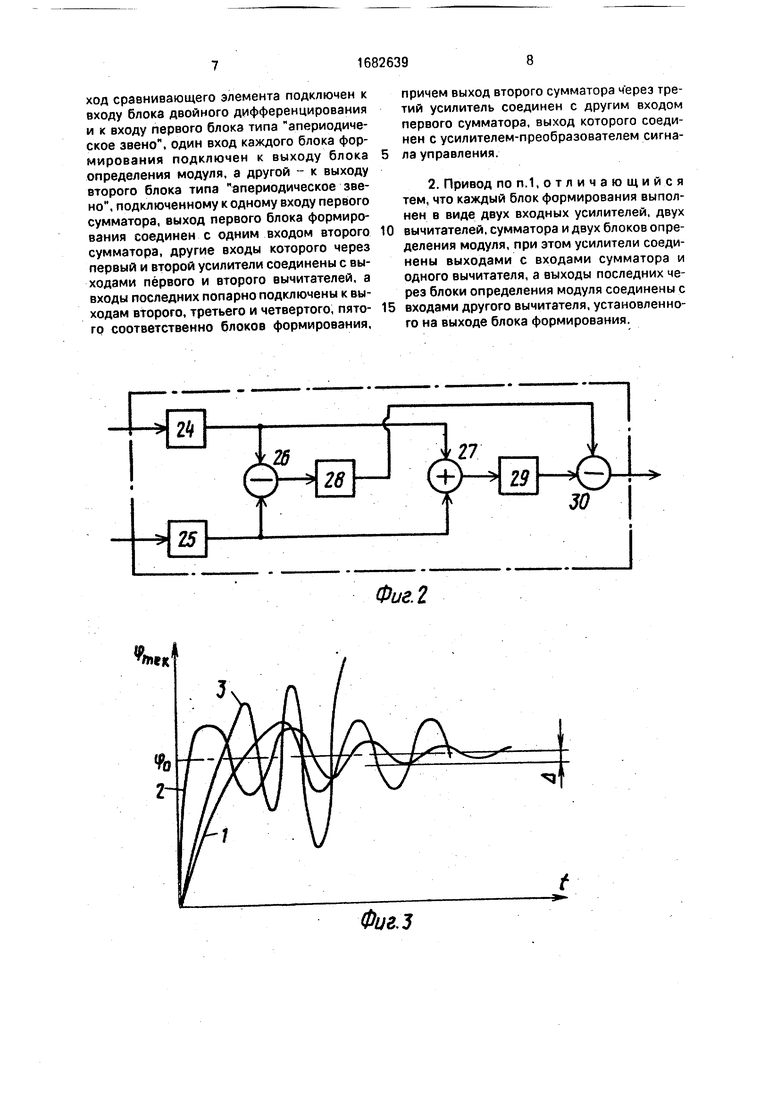
Из фиг.З и 4 видно, что гармонический входной сигнал с постоянной составляющей Хзад (fa + A sin w t отрабатывается обоими приводами без искажений (кривые 1 на фиг.З и 4) при частоте со , меньшей частоты среда cut, для известного привода (фиг.5), и при - для предлагаемого привода (фиг,6). При этом в данном приводе удается достичь большей точности отработки за счет возможности существенного повышения добротности привода (), где Д- статическая ошибка. При увеличении частоты т (Ос для известного привода (фиг.5) и ft)2 «У йМ для предлагаемого привода (фиг.6) известный привод пропускает гармоническую составляющую с большими искажениями (кривая 2 на фиг.З), а предлагаемый привод продолжает отрабатывать (кривая на фиг.4) сигнал рассогласо- вания. При частотах )2 и ал )5 (фиг.5) известный привод входит в расходящиеся колебания (кривая 3 на фиг.З), а предлагаемый привод обрезает гармоническую составляющую (кривая 3 на фиг. 4), по существу размыкая на этих частотах привод.
Формула изобретения 1. Пневматический привод, содержащий задатчик входного сигнала и датчик выходного сигнала привода, подключенные к входам сравнивающего элемента, выход которого через систему управления связан с усилителем-преобразователем сигнала управления в перемещение пневматического распределительного устройства, подключенного к источнику рабочей среды и исполнительному пневмодвигателю, отличающийся тем, что, с целью повышения точности и устойчивости, система управления выполнена в виде последовательно включенных блока двойного дифференцирования и блока определения модуля, двух последовательно включенных блоков типа апериодическое звено, а также пяти блоков формирования, двух вычитателей, трех усилителей и двух сумматоров, при этом выход сравнивающего элемента подключен к входу блока двойного дифференцирования и к входу первого блока типа апериодическое звено, один вход каждого блока формирования подключен к выходу блока определения модуля, а другой - к выходу второго блока типа апериодическое звено, подключенному к одному входу первого сумматора, выход первого блока формирования соединен с одним входом второго сумматора, другие входы которого через первый и второй усилители соединены с выходами первого и второго вычитателей, а входы последних попарно подключены к выходам второго, третьего и четвертого, пятого соответственно блоков формирования,
причем выход второго сумматора через третий усилитель соединен с другим входом первого сумматора, выход которого соединен с усилителем-преобразователем сигнала управления.
2. Привод по п.1,отличающийся тем, что каждый блок формирования выполнен в виде двух входных усилителей, двух вычитателей, сумматора и двух блоков определения модуля, при этом усилители соединены выходами с входами сумматора и одного вычитателя, а выходы последних через блоки определения модуля соединены с входами другого вычитателя, установленного на выходе блока формирования.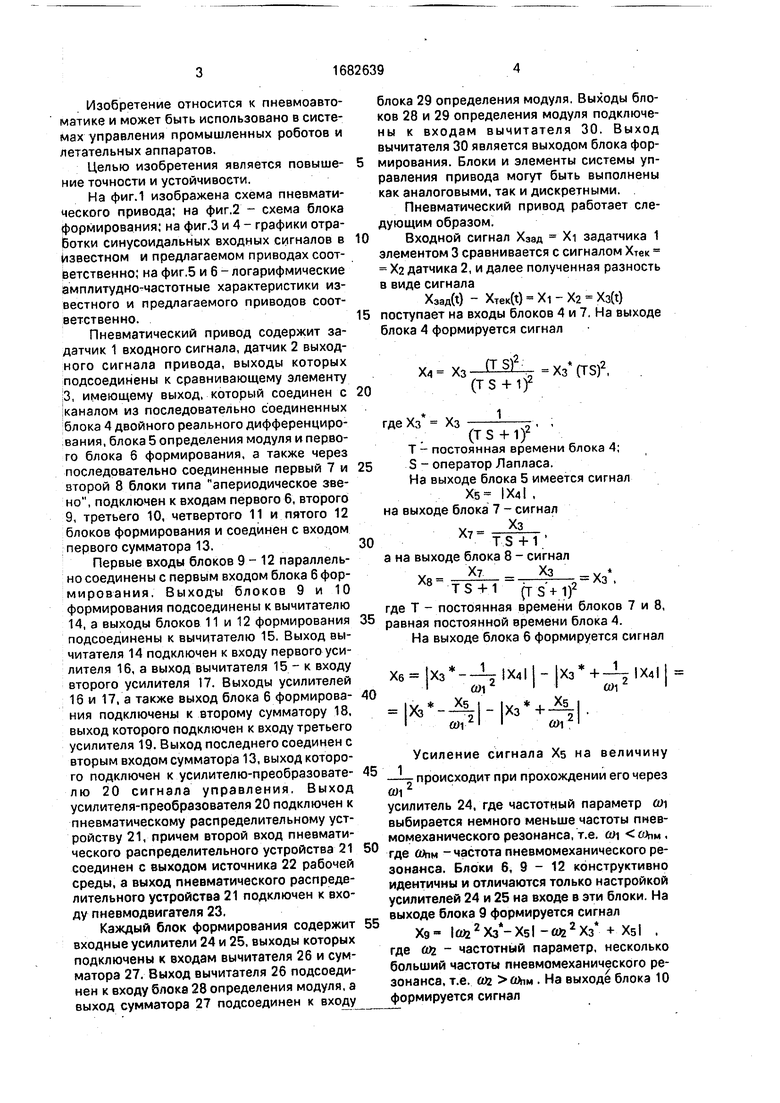
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИЗМЕРЕНИЯ ВЫСОТНО-СКОРОСТНЫХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2477862C1 |
| Стабилизирующий выпрямитель | 1987 |
|
SU1429257A1 |
| Следящий рулевой электропривод | 2022 |
|
RU2800527C1 |
| СЛЕДЯЩИЙ РУЛЕВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2399017C1 |
| Устройство для регулирования выходного напряжения тиристорного преобразователя частоты | 1988 |
|
SU1686659A1 |
| Корреляционный приемник сложных фазоманипулированных сигналов | 1981 |
|
SU1046943A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Позиционный пневмопривод | 1987 |
|
SU1481501A1 |
| СПОСОБ АДАПТИВНОЙ АНТИРЕЗОНАНСНОЙ КОРРЕКЦИИ НЕСТАБИЛЬНЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК КОЛЕБАТЕЛЬНОГО ОБЪЕКТА УПРАВЛЕНИЯ И САМОНАСТРАИВАЮЩАЯСЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2174252C1 |
| Спектральный анализатор случайных сигналов | 1984 |
|
SU1269048A1 |
Изобретение относится к пневмоавтоматике и может быть использовано в системах управления промышленных роботов и летательных аппаратов. Целью изобретения является повышение точности и устойчивости. Входной сигнал за датчика 1 элементом 3 сравнивается с сигналом датчика 2, и полученная разность поступает на входы блоков 4 и 7 системы управления. В ней формируется комплексный сигнал, дающий возможность широко варьировать коэффициент усиления усилителя-преобразователя 20. Сигнал последнего через устройство 21 приводит в движение пневмодвигатель 23, устраняющий рассогласование в приводе. На участке, где возможны расходящиеся колебания, система управления обрезает гармоническую составляющую входного сигнала, размыкая на этих частотах привод. 1 з.п.ф-лы, 6 ил.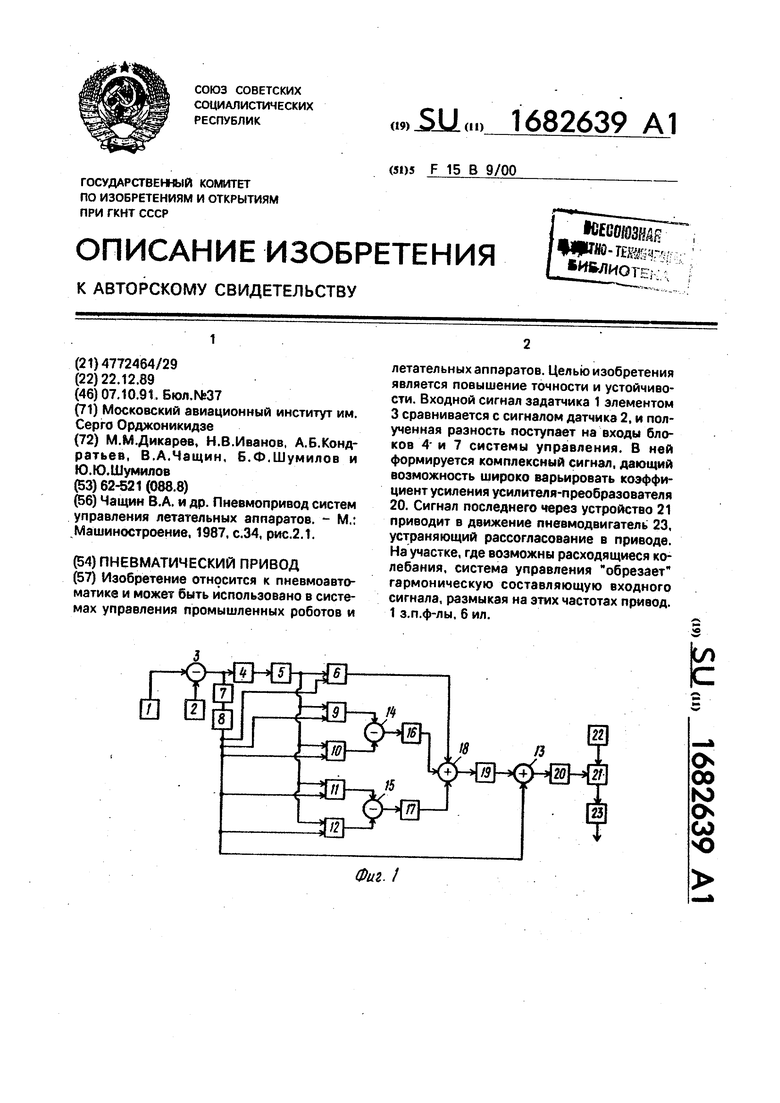
24
25
±27
±М
Фиг. 2
Фиг.З
Фиг.Ь
Јт, ffi
-4/t4
ik
-qUV, {Ј«
AZO
| Чащин В.А | |||
| и др | |||
| Пневмопривод систем управления летательных аппаратов | |||
| - М: Машиностроение, 1987, с.34, рис.2.1. |
