4- 00
сл
Изобретение относится к машиностроению, в частности к средствам пневмоавтоматики, предназначенным для перемещения органов управления из одного положения в другое, и может найти применение в различном автоматическом оборудовании.
Целью изобретения является расширение области применения пневмопривода путем обеспечения регулирования быстродей гвия и точности позиционирования в широких диапазонах.
На фиг. 1 представлена принципиальная схема пневмопривода; на фиг. 2 - вариант выполнения схемы на базе операционных усилителей.
Позиционный пневмопривод содержит пневмодвигатель 1 с выходным звеном 2, подключенный к источнику рабочей среды и сливу через пневмораспределители 3 и 4, систему управления, включающую блок 5 датчиков обратной связи, выходы 6 и 7 которого связаны через блок 8 предварительной обработки сигналов обратных связей, сравнивающие устройства 9 и 10 к входам 11 и 12 блока 13 управления. Кроме того, система управления снабжена усилителями 14 и 15 с переменными коэффициентами усиления, блоком 16 образования модуля, блоком 17 сравнения и блоком 18 коммутации с контактами 19 и 20, при этом выход 21 по меньшей мере одного из сравнивающих устройств, например 10, связан с входом 22 блока 16, выход 23 которого подключен к входу 24 блока 17, а его выходы 25 связаны с блоком 18. Выходы 21 и 26 сравнивающих устройств 9 и 10 подключены к входам 11 и 12 блока 13 управления через усилители 14 и 15 и контакты 19 и 20 блока 18.
На фиг. 1 обозначены: Хз, Уз - задающие сигналы соответственно по положению и по скорости выходного звена 2; е,з - алгоритм, т. е. задающие сигналы переключения коэффициентов усиления усилителей 14 и 15; X, X - сигналы обратных связей соответственно по перемещению и по скорости; Ко, Кчо - коэффициенты предварительного усиления сигналов обратных связей соответственно по перемещению и по скорости; Кь Ка. .... К, - переменные коэффициенты усиления по перемещению; Kvi, Ки2, -, Km - переменные коэффициенты усиления по скорости; е - результирующий сигнал (сигнал рассогласования); lei - модуль результирующего сигнала г.
Позиционный пневмопривод работает следующим образом.
В пневмодвигатель 1 с выходным звеном 2., снабженным блоком 5 датчиков обратной связи, через пневмораспределители 3 и 4, управляемые от блока 13 управления, подается и отводится рабочая среда под давлением. В результате выходное звено 2 начинает перемещаться в точку, соответствующую задающим сигналам Х3 и/или Уз
или только Хз, поступающим из блока 13 управления на сравнивающие устройства 9 и 10, на входы которых поступают сигналы с выхода блока 5 датчиков обратной связи, предварительно усиленные и преобразованные (например, в случае, когда датчик обратной связи по скорости отсутствует, а сигнал обратной связи по скорости получают путем дифференцирования сигнала обратной связи по перемещению) в блоке 8 предварительной обработки сигналов обратных связей. С выходов 26 и 21 сравнивающих устройств 9 и 10 результирующие сигналы (сигналы рассогласования или ошибки) поступают соответственно на входы
5 усилителей 14 и 15 с переменными коэффициентами. Одновременно с этим с выхода 21 результирующий сигнал е Хз-КоХ поступает на вход блока 16 образования модуля, с выхода 23 которого модуль |е| результирующего сигнала поступает на вход
0 24 блока 17 сравнения. В блок 17 сравнения поступают также задающие сигналы переключения е,з из блока 13 управления. Сигнал сравнения модуля |е| результирующего сигнала с сигналами е,з поступает с
5 блока 17 сравнения на блок 18 коммутации, который коммутирует в соответствии с заданным алгоритмом (е,3) свои контакты 19 и 20. В результате с выхода усилителей 14 и 15 соответственно через контакты 19 и 20 на входы 11 и 12 блока 13 управления
0 поступают результирующие сигналы, преобразованные в соответствии с коммутируемым значением коэффициента усиления. На основании этих сигналов в блоке 13 управления формируются сигналы управления пневмораспределителями 3 и 4, регулирую5 щими подвод и отвод рабочей среды в пневмодвигатель 1.
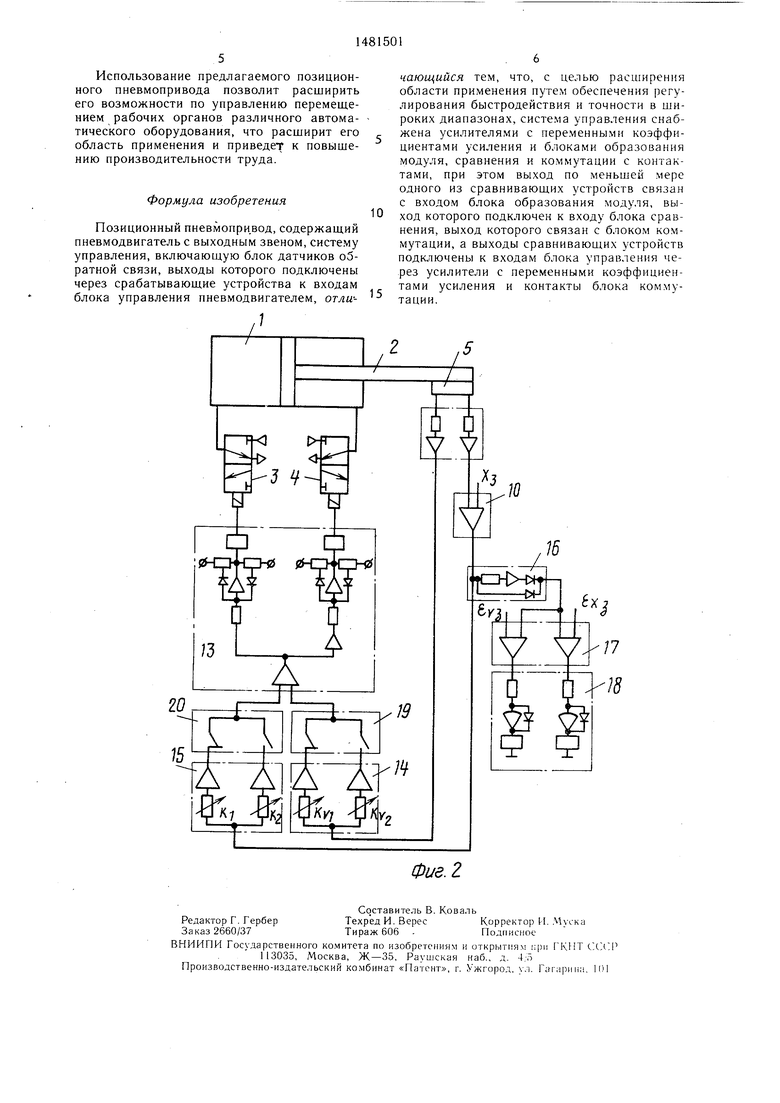
Таким образом, задавая различные алгоритмы (е,з) переключения коэффициентов, можно получить различные законы изменения координат привода (скорость, перемещение, давлением и др.), в том числе осуществлять адаптивное управление. Это приводит к расширению возможностей по управлению пневмоприводом. В варианте пнев5 мопривода, показанном на фиг. 2, управление переключением коэффициентов осу- ществляется только в зависимости от сигнала рассогласования по перемещению выходного звена 2, перемещение и позиционирование которого реализовано по принципу
0 релейного пневмопривода, работающего в режиме широтно-импульсной модуляции или автоколебаний. При этом быстродействие пневмопривода при работе в режиме широтно-импульсной модуляции может быть повышено в 1,5 раза при отсутствии перерегу5 лирования, а при работе пневмопривода в релейном автоколебательном режиме точность позиционирования может быть повышена в 1,3 раза.
Использование предлагаемого позиционного пневмопривода позволит расширить его возможности по управлению перемещением рабочих органов различного автоматического оборудования, что расширит его область применения и приведет к повышению производительности труда.
Формула изобретения
Позиционный пневмопривод, содержащий пневмодвигательс выходным звеном, систему управления, включающую блок датчиков обратной связи, выходы которого подключены через срабатывающие устройства к входам блока управления пневмодвигателем, от ли:/
5
чающийся тем, что, с целью расширения области применения путем обеспечения регулирования быстродействия и точности в широких диапазонах,система управления снабжена усилителями с переменными коэффициентами усиления и блоками образования модуля, сравнения и коммутации с контактами, при этом выход по меньшей мере одного из сравнивающих устройств связан с входом блока образования модуля, выход которого подключен к входу блока сравнения, выход которого связан с блоком коммутации, а выходы сравнивающих устройств подключены к входам блока управления через усилители с переменными коэффициентами усиления и контакты блока коммутации.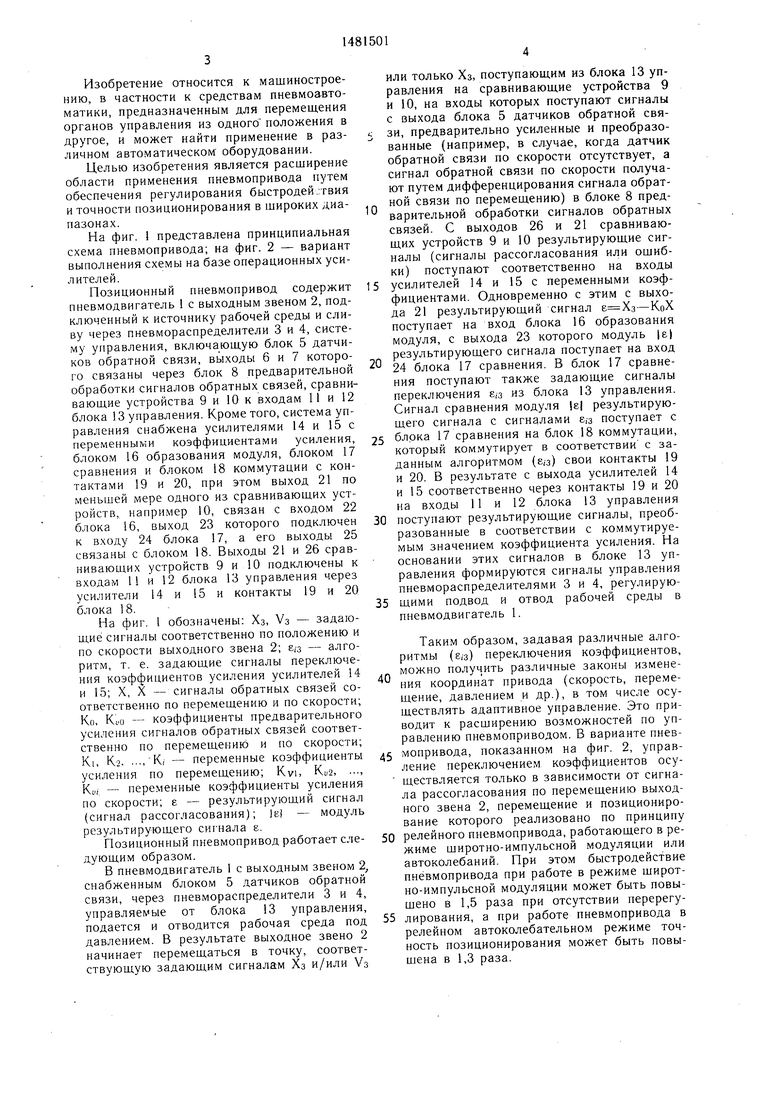
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический привод | 1989 |
|
SU1682639A1 |
| Способ управления позиционным пневмоприводом и позиционный пневмопривод для его осуществления | 1988 |
|
SU1596143A1 |
| Позиционный пневматический привод | 2018 |
|
RU2689662C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПНЕВМОПРИВОДОМ ТАЛИ | 2005 |
|
RU2309113C1 |
| Цифровая система управления | 1984 |
|
SU1229724A1 |
| Позиционный пневмопривод | 1987 |
|
SU1442714A1 |
| Способ управления коммутацией электродвигателя постоянного тока и устройство для его осуществления | 1984 |
|
SU1327259A1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2218549C2 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| Интегрирующий привод постоянного тока | 1989 |
|
SU1716480A1 |
Изобретение позволяет расширить область применения пневмопривода путем обеспечения регулирования быстродействия и точности позиционирования в широких диапазонах. Пневмодвигатель 1 с выходным звеном 2 подключен к пневмораспределителям 3, 4. Система управления включает связанные между собой блок 5 датчиков обратной связи, блок 8 предварительной обработки сигналов обратной связи, сравнивающие устройства 9, 10, блок 13 управления, усилителя 14, 15 с переменными коэффициентами усиления, блок 16 образования модуля, блок 17 сравнения и блок 18 коммутации с контактами 19, 20. Управление переключением коэффициентов усиления осуществляется только в зависимости от сигнала рассогласования по перемещению выходного звена 2, перемещение и позиционирование которого реализовано по принципу релейного пневмопривода, работающего в режиме широтно-импульсной модуляции или автоколебаний. Таким образом, задавая различные алгоритмы переключения коэффициентов усиления можно получить законы изменения координат привода, в том числе осуществлять адаптивное управление. 2 ил.
70
| Двухотсчетный позиционный пневмопривод | 1984 |
|
SU1231283A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
