Изобретение относится к погрузочно- разгрузочному, транспортно-складскому и вспомогательному технологическому оборудованию, а именно к оборудованию для осуществления перегрузочных работ с одного транспортного средства или технологического оборудования на другое.
Целью изобретения является повышение надежности, а также снижение энергозатрат.
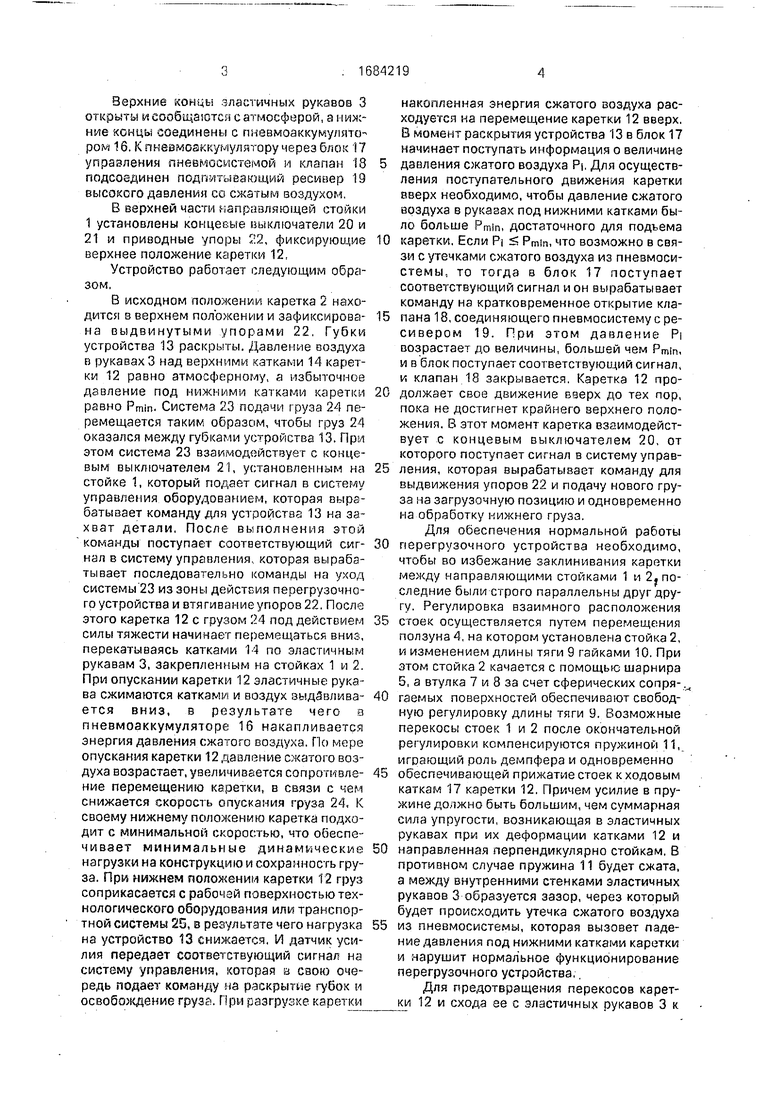
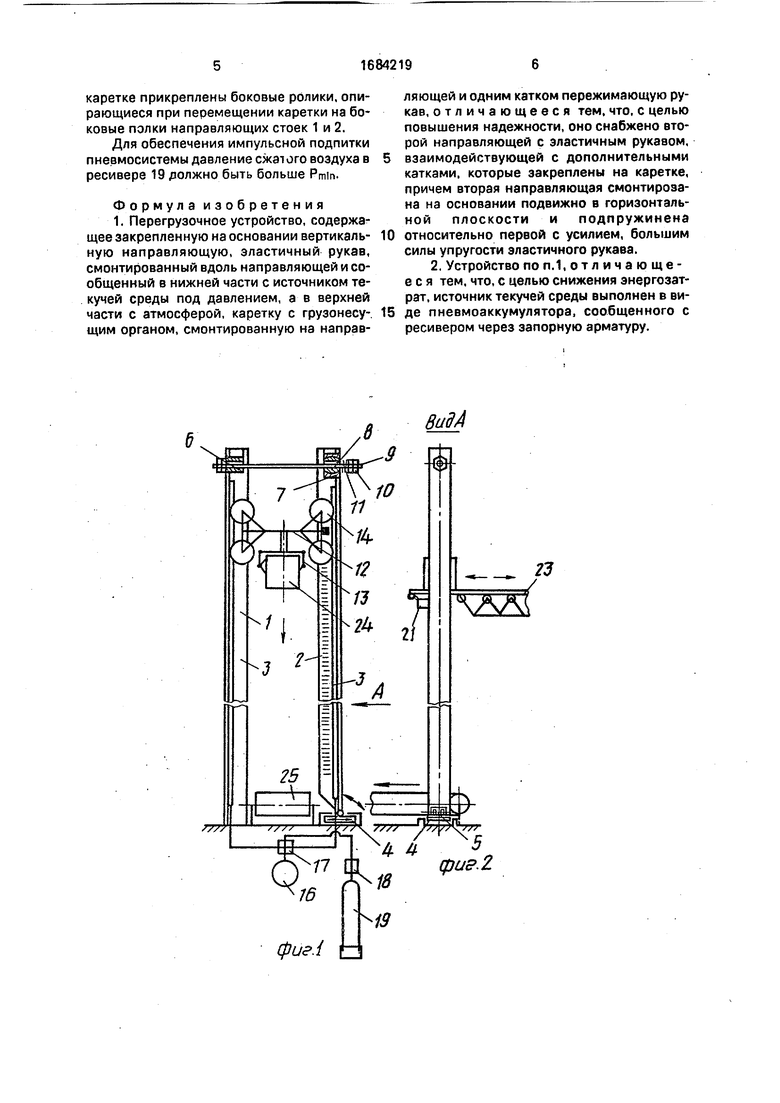
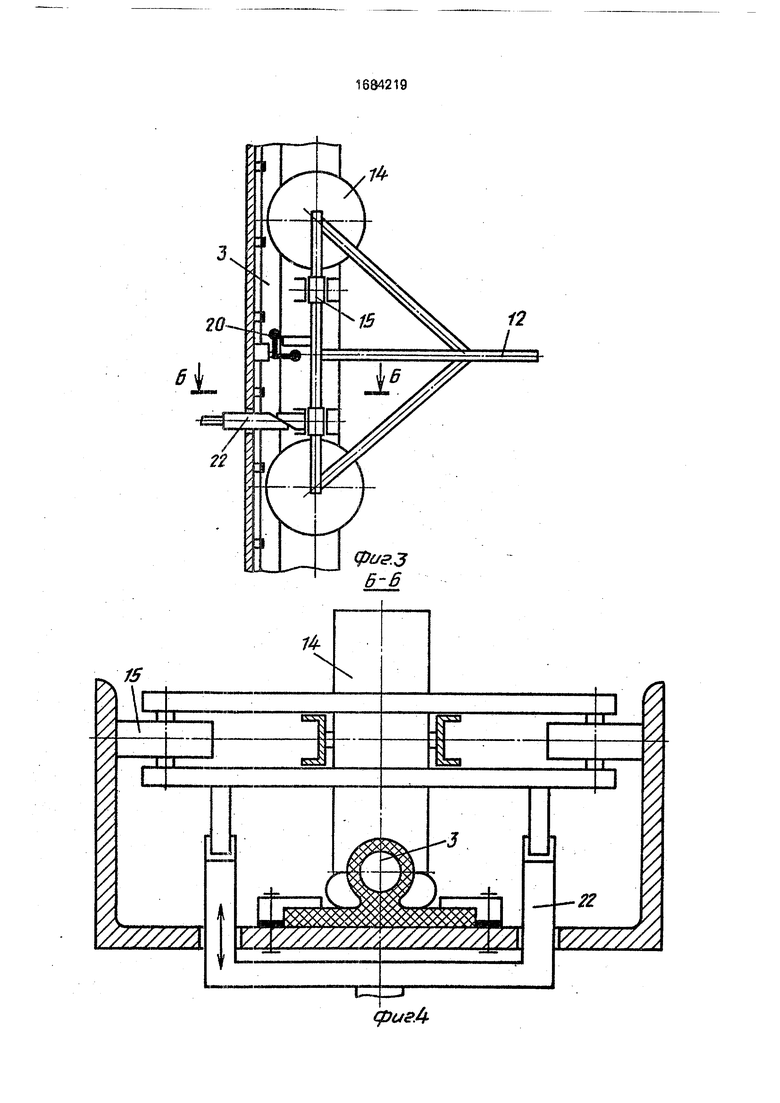
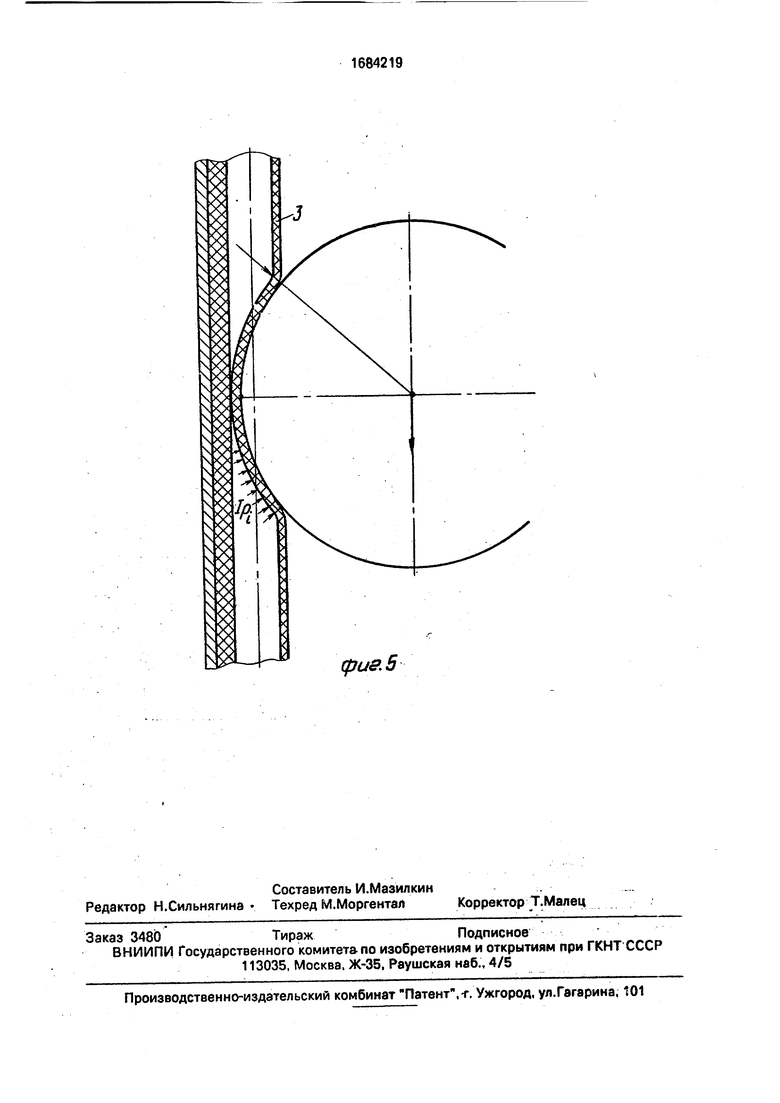
На фиг.1 изображено перегрузочное устройство, общий вид; на фиг.2 - вид по стрелке А на фиг.1; на фиг.З - часть направляющей с кареткой; на фиг.4 - разрез Б-Б на фиг.2; на фиг.5 - расчетная схема.
Устройство состоит из неподвижной направляющей стойки 1 и подвижной направляющей стойки 2, на которых закреплены эластичные рукава 3. Направляющая стойка 2 имеет возможность перемещения вдоль
основания с помощью ползуна 4, с которым она связана шарниром 5 и имеет возможность поворачиваться в вертикальной плоскости. В верхней части стойки 1 установлена цилиндрическая втулка 6, а на стойке 2 установлена втулка 7, имеющая внутреннюю сферическую поверхность, с которой сопрягается втулка 8, имеющая наружную сферическую и внутреннюю цилиндрическую поверхности. Сквозь втулки G и 8 проходит тяга 9, на резьбовых концах которой закреплены гайки 10. Между гайкой 10 и втулками 7 и 8 на тяге установлена пружина 11.
По закрепленным на направляющих стойках 1 и 2 эластичным рукавам 3 перемещается грузовая каретка 12 с захватным устройством 13. Каретка имеет цилиндрические катки 14 и боковые ролики 15.
О 00
4
ю ю
Верхние концы пластичных рукавов 3 открыты и сообщаются с атмосферой, а пихание концы соединены с пневмоаккумулято- ром 16. К пневмоаккумулятору через блок 17 управления пневмссистемой м клапан 18 подсоединен подпитывающий ресивер 19 высоксго давления со сжатым воздухом,
В верхней части направляющей стойки 1 установлены концеше выключатели 20 и 21 и приводные упоры 22, фиксирующие верхнее положение каретки 12.
Устройство работает следующим образом,
В исходном положении каретка 2 находится в верхнем положении и зафиксирована выдвинутыми упорами 22, Губки устройства 13 раскрыты. Давление воздуха в рукавах 3 над верхними катками 14 каретки 12 равно атмосферному, а избыточное давление под нижними катками каретки равно Pmin. Система 23 подачи груза 24 перемещается таким образом, чтобы груз 24 оказался между губками устройства 13. При этом система 23 взаимодействует с концевым выключателем 21, установленным на стойке 1, который подает сигнал в систему управления оборудованием, которая вырабатывает команду для устройства 13 на захват детали, После выполнения этой команды поступает соответствующий сигнал в систему управления которая вырабатывает последовательно команды на уход системы 23 из зоны действия перегрузочного устройства и втягивание упоров 22. После этого каретка 12с грузом 24 под действием силы тяжести начинает перемещаться вниз, перекатываясь катками 14 по эластичным рукавам 3, закрепленным на стойках 1 и 2. При опускании каретки 12 эластичные рукава сжимаются катками и воздух зыдЗвлива- ется вниз, в результате чего а пневмоаккумуляторе 16 накапливается энергия давления сжатого воздуха. По мере опускания каретки 12 давление сжатого воздуха возрастает, увеличивается сопротивление перемещению кэретки, в связи с чем снижается скорость опускания груза 24, К своему нижнему положению каретка подходит с минимальной скоростью, что обеспечивает минимальные динамические нагрузки на конструкцию и сохранность груза. При нижнем положении каретки 12 груз соприкасается с рабочэй поверхностью технологического оборудования или транспортной системы 20, в результате чего нагрузка на устройство 13 снижается. И датчик усилия передает соответствующий сигнал на систему управления, которая в свою очередь подает команду на раскрытие губок и освобождение груз. При разгрузке каретки
накопленная энергия сжатого воздуха расходуется на перемещение каретки 12 вверх. В момент раскрытия устройства 13 в блок 17 начинает поступать информация о величине
давления сжатого воздуха PI, Для осуществления поступательного движения каретки вверх необходимо, чтобы давление сжатого воздуха в руказах под нижними катками было больше Pmin, достаточного для подъема
0 каретки. Если PI Pmin, что возможно в связи с утечками сжатого воздуха из пневмоси- стемы, то тогда в блок 17 поступает соответствующий сигнал и он вырабатывает команду на кратковременное открытие кла5 пана 18, соединяющего пневмосистему с ресивером 19. При этом давление PI возрастает до величины, большей чем Pmin, и в блок поступает соответствующий сигнал, и клапан 18 закрывается. Каретка 12 про0 должает свое движение взерх до тех пор, пока не достигнет крайнего верхнего положения. В этот момент каретка взаимодействует с концевым выключателем 20, от которого поступает сигнал в систему управ5 ления, которая вырабатывает команду для выдвижения упоров 22 и подачу нового груза на загрузочную позицию и одновременно на обработку нижнего груза.
Для обеспечения нормальной работы
0 перегрузочного устройства необходимо, чтобы во избежание заклинивания каретки между направляющими стойками 1 и 2. последние были строго параллельны друг другу. Регулировка взаимного расположения
5 стоек осуществляется путем перемещения ползуна 4, на котором установлена стойка 2, и изменением длины тяги 9 гайками 10. При этом стойка 2 качается с помощью шарнира 5, а втулка 7 и 8 за счет сферических сопря-.
0 гаемых поверхностей обеспечивают свободную регулировку длины тяги 9. Возможные перекосы стоек 1 и 2 после окончательной регулировки компенсируются пружиной 11, играющий роль демпфера и одновременно
5 обеспечивающей прижатие стоек к ходовым каткам 17 каретки 12. Причем усилие в пружине должно быть большим, чем суммарная сила упругости, возникающая в эластичных рукавах при их деформации катками 12 и
0 направленная перпендикулярно стойкам, В противном случае пружина 11 будет сжата, а между внутренними стенками эластичных рукавов 3 образуется зазор, через который будет происходить утечка сжатого воздуха
5 из пневмосистемы, которая вызовет падение давления под нижними катками каретки и нарушит нормальное функционирование перегрузочного устройства,.
Для предотвращения перекосов каретки 12 и схода ее с эластичных рукавов 3 к
каретке прикреплены боковые ролики, опирающиеся при перемещении каретки на боковые полки направляющих стоек 1 и 2.
Для обеспечения импульсной подпитки пневмосистемы давление сжатого воздуха в ресивере 19 должно быть больше Pmin.
Формула изобретения 1. Перегрузочное устройство, содержащее закрепленную на основании вертикальную направляющую, эластичный рукав, смонтированный вдоль направляющей и сообщенный в нижней части с источником текучей среды под давлением, а в верхней части с атмосферой, каретку с грузонесу- щим органом, смонтированную на направ0
5
ляющей и одним катком пережимающую рукав, отличающееся тем, что, с целью повышения надежности, оно снабжено второй направляющей с эластичным рукавом, взаимодействующей с дополнительными катками, которые закреплены на каретке, причем вторая направляющая смонтирована на основании подвижно в горизонтальной плоскости и подпружинена относительно первой с усилием, большим силы упругости эластичного рукава.
2. Устройство по п.1, отличающееся тем, что, с целью снижения энергозатрат, источник текучей среды выполнен в виде пневмоаккумулятора, сообщенного с ресивером через запорную арматуру.
NSb
CW
фи&5
| название | год | авторы | номер документа |
|---|---|---|---|
| ОЧИСТНОЙ МЕХАНИЗИРОВАННЫЙ КОМПЛЕКС ПРОФЕССОРА КАРИМАНА ДЛЯ ДОБЫЧИ ИСКОПАЕМОГО КРУПНЫМИ БЛОКАМИ | 2011 |
|
RU2463450C1 |
| СТОЛ ПЕРЕГРУЗОЧНЫЙ | 2018 |
|
RU2695863C1 |
| СПОСОБ СНИЖЕНИЯ ДИНАМИЧЕСКОЙ НАГРУЖЕННОСТИ ТРАНСПОРТНОГО СРЕДСТВА ПРИ ДВИЖЕНИИ ПО ПОВЕРХНОСТИ И ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2603703C1 |
| КОМПЛЕКС ПОДЪЕМНО-ТРАНСПОРТНОГО ОБОРУДОВАНИЯ ДЛЯ УТИЛИЗАЦИИ ЖИДКИХ РАДИОАКТИВНЫХ ОТХОДОВ НА АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И ЕГО СОСТАВНЫЕ ЧАСТИ | 2007 |
|
RU2350545C1 |
| СПОСОБ СНИЖЕНИЯ ВЕРТИКАЛЬНЫХ И УГЛОВЫХ ПЕРЕГРУЗОК ТРАНСПОРТНОГО СРЕДСТВА ПРИ ДВИЖЕНИИ ПО ПОВЕРХНОСТИ И ТРАНСПОРТНОЕ СРЕДСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 2014 |
|
RU2569235C1 |
| Подъемник | 1975 |
|
SU537923A1 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
| Устройство для подъема и опускания грузов | 1980 |
|
SU984985A1 |
| Гибкая производственная система | 1989 |
|
SU1672704A1 |
| ТРАНСПОРТНО-УСТАНОВОЧНЫЙ АГРЕГАТ СТАРТОВОГО РАКЕТНОГО КОМПЛЕКСА | 2011 |
|
RU2478539C2 |
Изобретение относится к оборудованию для погрузочно-разгрузочных, транспортно- складских работ и может быть использовано при перегрузке штучных или затаренных грузов с одного транспортного средства или технологического оборудования на другое. Цель изобретения - повышение надежности и снижение энергозатрат. Устройство содержит вертикальные направляющие стойки 1 с закрепленными на них эластичными рукавами 3, грузонесущую каретку 12, пнев- моаккумуляторы 16 и ресивер 19. Устройство позволяет использовать силу тяжести груза и грузонесущей каретки для накопления энергии давления сжатого воздуха при опускании груза в пневмоаккумуляторе и расходовать накопленную энергию для подъема порожней каретки. Для компенсации утечек сжатого воздуха из эластичных трубок с помощью системы управления осуществляется импульсная подача сжатого воздуха из ресивера. 1 з.п. ф-лы, 5 ил. сл с
| Патент ФРГ № 3136739,кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "БИТОЧКИ ОСОБЫЕ С СОУСОМ СМЕТАННЫМ С ЛУКОМ" | 2013 |
|
RU2508884C1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Подъемник | 1974 |
|
SU512976A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
