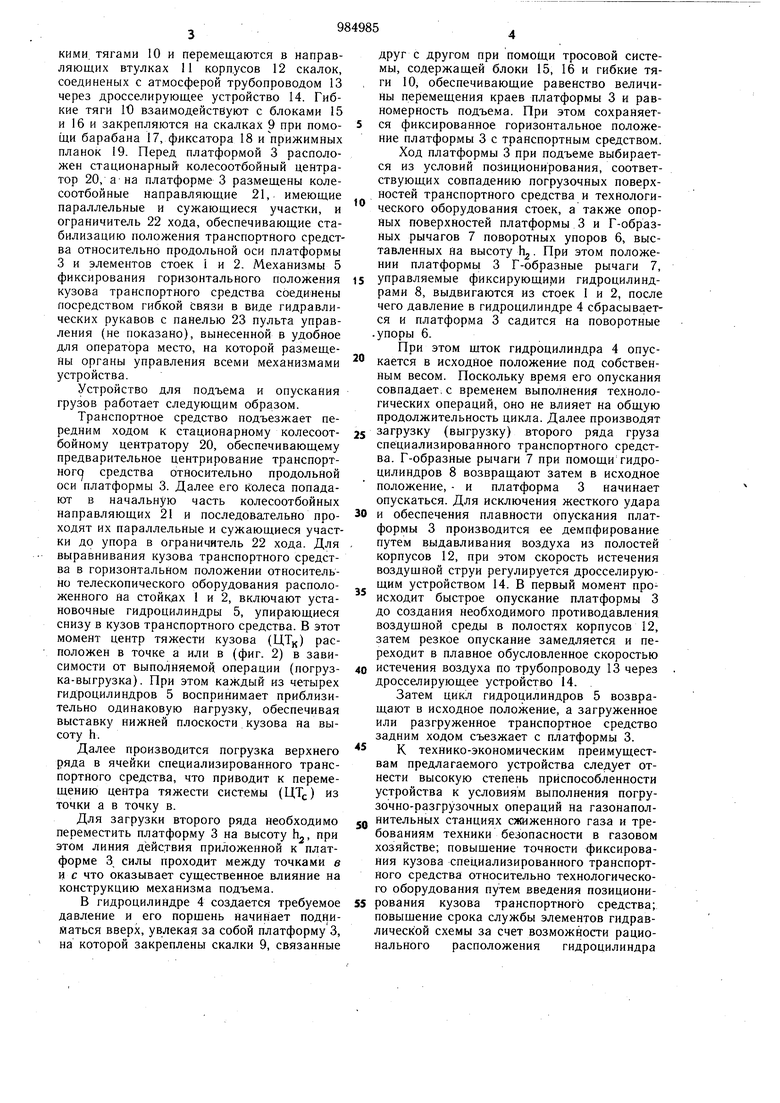
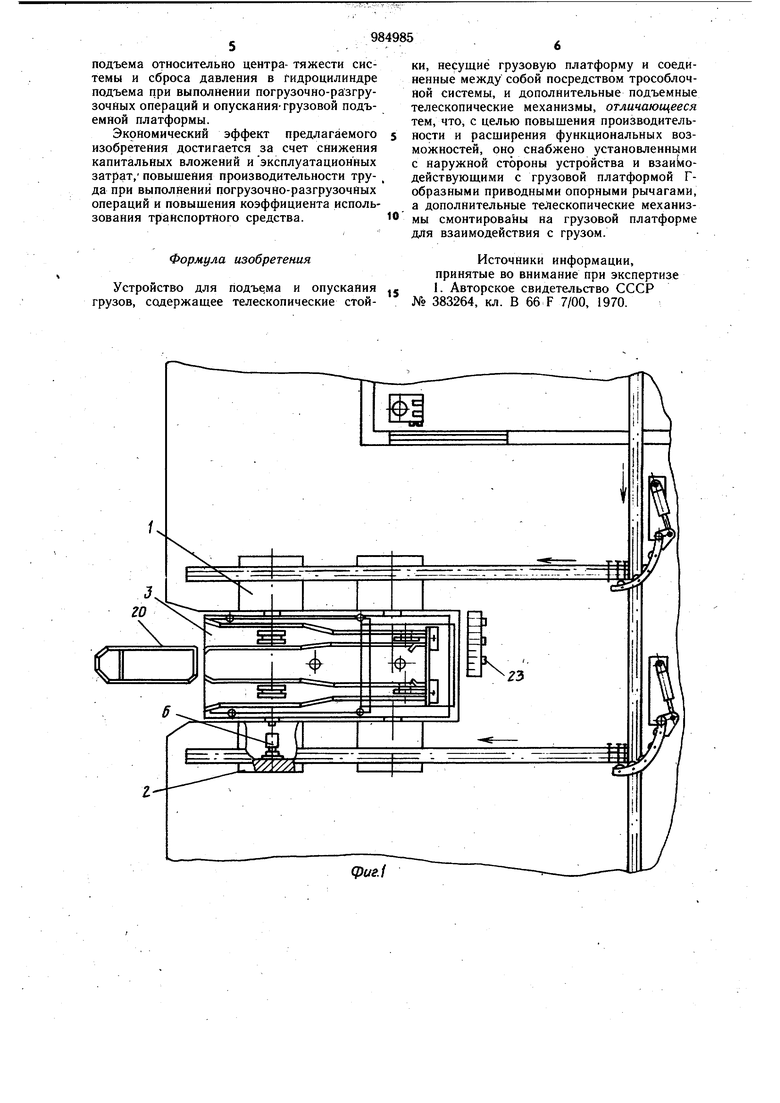
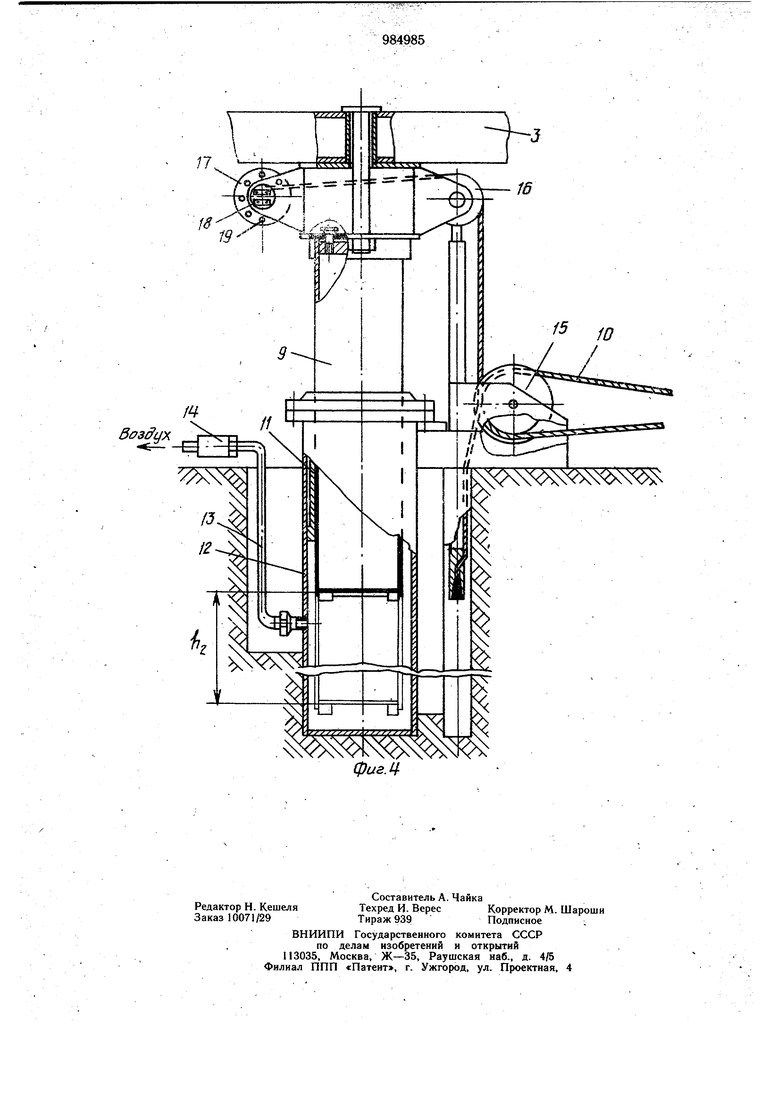
Изобретение относится к грузоподъемным механизмам. Известно устройство для подъема и опускания грузов, содержащее телескопические стойки, несущие грузовую платформу и соединенные между собой посредством трособлочной системы, и дополнительные телескопические механизмы 1. Недостатком известного устройства является сравнительно низкая производительность, заключающаяся в том, что оно не пред назначено для использования -в технологической цепочке механизированной обработки груза, поставляемого в кузове транспортного средства. Цель изобретения - повышение производительности и расширение функциональных возможностей устройства. Поставленная цель достигается тем, что устройство для подъема и опускания грузов снабжено установленными с наружной сторо ны устройства и взаимодействующими с грузовой платформой Г-образными приводными опорными рычагами, а дополнительные телескопические механизмы смонтированы на грузовой платформе для взаимодействия с грузом. На фиг. 1 представлено устройство, вид сверху; на фиг. 2 - то же, продольный разрез; на фиг. 3 - то же; поперечный разрез; на фиг. 4 - направляющая скалка f. элементами синхронизации и демпфирования, разрез. В состав устройства для подъема и опускания грузов (в частности, специализированного транспортного средства) входят две стойки 1 и 2, размещенные вдоль опорного элемента 3, выполненного в виде грузовой подъемной платформы, перемещаемой при помощи механизма 4 подъема в виде одноплунжерного гидроцилиндра. Под кузовом транспортного средства, вдоль бортов, на платформе 3 размещены телескопические механизмы 5 фиксирования горизонтального положения кузова транспортного средства, выполненные в виде вертикально установленных гидроцилиндров. Внутри стоек 1 и 2 размещены поворотные упоры 6 позиционирования транспортного средства в виде Гобразных рычагов 7, управляемых фиксирующими гидроцилиндрами 8. Направляющие скалки 9 синхронизации перемещения платформы по высоте и опускания его с демпфированием связаны, между собой гибкими, тягами 10 и перемещаются в направляющих втулках 11 корпусов 12 скалок, соединеных с атмосферой трубопроводом 13 через дросселирующее устройство 14. Гибкие тяги 10 взаимодействуют с блоками 15 и 16 и закрепляются на скалках 9 при помощи барабана 17, флксатора 18 и прижимных планок 19. Перед платформой 3 расположен стационарный- колесоотбойный центратор 20, а на платформе 3 размещены колесоотбойные направляющие 21, имеющие параллельные и сужающиеся участки, и ограничитель 22 хода, обеспечивающие стабилизацию положения транспортного средства относительно продольной оси платформы 3 и элементов стоек 1 и 2. Механизмы 5 фиксирования горизонтального положения кузова транспортного средства соединены посредством гибкой связи в виде гидравлических рукавов с панелью 23 пульта управления (не показано), вынесенной в удобное для оператора место, на которой размещены органы управления всеми механизмами устройства.
Устройство для подъема и опускания грузов работает следующим образом.
Транспортное средство подъезжает передним ходом к стационарному колесоотбойному центратору 20, обеспечивающему предварительное центрирование транспортHorcj средства относительно продольной оси платформы 3. Далее его колеса попадают в начальную часть колесоотбойных направляющих 21 и последовательно проходят их параллельные и сужающиеся участки до упора в ограничитель 22 хода. Для выравнивания кузова транспортного средства в горизонтальном положении относительно телескопического оборудования расположенного на стойках 1 и 2, включают установочные гидроцилиндры 5, упирающиеся снизу Б кузов транспортного средства. В этот момент центр тяжести кузова (UTj) расположен в точке а или в (фиг. 2) в зависимости от выполняемой операции (погрузка-выгрузка). При этом каждый из четырех гидроцилиндров 5 воспринимает приблизительно одинаковую нагрузку, обеспечивая выставку нижней плоскости кузова на высоту h.
Далее производится погрузка верхнего ряда в ячейки специализированного транспортного средства, что приводит к перемещению центра тяжести системы () из точки а в точку в.
Для загрузки второго ряда необходимо переместить платформу 3 на высоту h, при этом линия действия приложенной к платформе 3 силы проходит между точками в и с что оказывает существенное влияние на конструкцию механизма подъема.
В гидроцилиндре 4 создается требуемое давление и его порщень начинает подниматься вверх, увлекая за собой платформу 3, на которой закреплены скалки 9, связанные
друг с другом при помощи тросовой системы, содержащей блоки 15, 16 и гибкие тяги 10, обеспечивающие равенство величины перемещения краев платформы 3 и равномерность подъема. При этом сохраняется фиксированное горизонтальное положение платформы 3 с транспортным средством. Ход платформы 3 при подъеме выбирается из условий позиционирования, соответствующих совпадению погрузочных поверхностей транспортного средства и технологического оборудования стоек, а также опорных поверхностей платформы 3 и Г-образных рычагов 7 поворотных упоров 6, выставленных на высоту h. При этом положении платформы 3 Г-образные рычаги 7,
управляемые фиксирующими гидроцилиндрами 8, выдвигаются из стоек 1 и 2, после чего давление в гидроцилиндре 4 сбрасывается и платформа 3 садится на поворотные .упоры 6.
При этом щток гидроцилиндра 4 опускается в исходное положение под собственным весом. Поскольку время его опускания совпадает, с временем выполнения технологических операций, оно не влияет на общую продолжительность цикла. Далее производят
5 загрузку (выгрузку) второго ряда груза специализированного транспортного средства. Г-образные рычаги 7 при помощи гидроцилиндров 8 возвращают затем в исходное положение, - и платформа 3 начинает опускаться. Для исключения жесткого удара
0 и обеспечения плавности опускания платформы 3 производится ее демпфирование путем выдавливания воздуха из полостей корпусов 12, при этом скорость истечения воздущной струи регулируется дросселирующим устройством 14. В первый момент происходит быстрое опускание платформы 3 до создания необходимого противодавления воздущной среды в полостях корпусов 12, затем резкое опускание замедляется и переходит в плавное обусловленное скоростью
0 истечения воздуха по трубопроводу 13 через дросселирующее устройство 14.
Затем цикл гидроцилиндров 5 возвращают в исходное положение, а загруженное или разгруженное транспортное средство задним ходом съезжает с платформы 3.
5 К. технико-экономическим преимуществам предлагаемого устройства следует отнести высокую степень приспособленности устройства к условиям выполнения погрузочно-разгрузочных операций на газонаполJQ нительных станциях сжиженного газа и требованиям техники безопасности в газовом хозяйстве; повыщение точности фиксирования кузова специализированного транспортного средства относительно технологического оборудования путем введения позиционирования кузова транспортного средства; повыщение срока службы элементов гидравлической схемы за счет возможности рационального расположения гидроцилиндра
подъема относительно центра- тяжести системы и сброса давления в гидроцилиндре подъема при выполнении погрузочно-разгрузочных операций и опускания-грузовой подъемной платформы.
Экономический эффект предлагаемого 5 изобретения достигается за счет снижения капитальных вложений и эксплуатационных затрат, повышения производительности тру- да при выполнений погрузочно-разгрузочных операций и повышения коэффициента использования транспортного средства.Ю
Формула изобретения
Устройство для подъема и опускания ,грузов, содержащее телескопические стойки, несущие грузовую платформу и соединенные между собой посредством трособлочной системы, и дополнительные подъемные телескопические механизмы, отличающееся тем, что, с целью повышения производительности и расширения функциональных возможностей, оно снабжено установленнь1ми с наружной стороны устройства и взаиК(одействующими с грузовой платформой Гобразными приводными опорными рычагами, а дополнительные телескопические механизмы смонтированы на грузовой платформе дДя взаимодействия с грузом.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 383264, кл. В 66 F 7/00, 1970.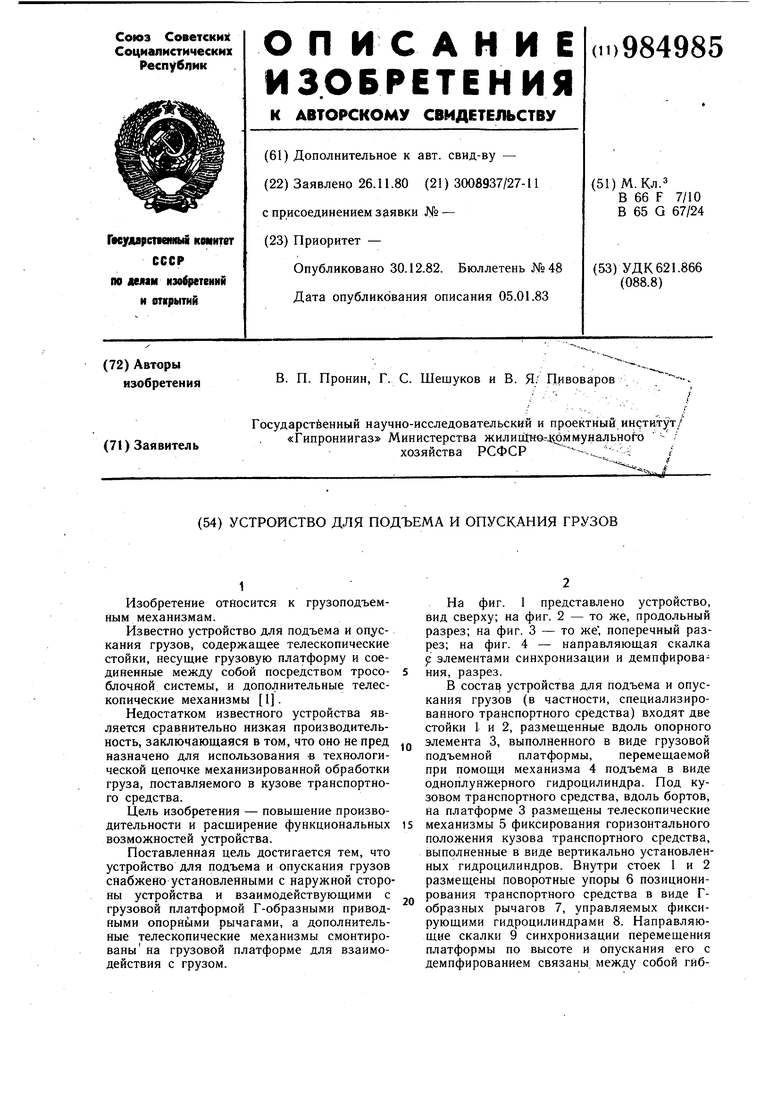
| название | год | авторы | номер документа |
|---|---|---|---|
| Погрузо-разгрузочное устройство транспортного средства | 1990 |
|
SU1787829A1 |
| Транспортное средство | 1990 |
|
SU1772013A1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| ТРАНСПОРТНО-СТЫКОВОЧНЫЙ АГРЕГАТ | 2007 |
|
RU2350493C1 |
| Грузоподъемное устройство транспортного средства | 1983 |
|
SU1197885A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ СУПЕРКОНТЕЙНЕРОВ С РАЗРЯДНЫМИ И ЭКОЛОГИЧЕСКИ ОПАСНЫМИ ГРУЗАМИ | 2013 |
|
RU2550940C1 |
| ПОГРУЗОЧНО-ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2537047C2 |
| Грузоподъемный борт транспортного средства | 1981 |
|
SU1054135A1 |
| ГРУЗОПОДЪЕМНЫЙ МЕХАНИЗМ | 1999 |
|
RU2173270C2 |
| Полуприцеп с изменяемой погрузочной высотой для перевозки крупногабаритных грузов | 1982 |
|
SU1098858A1 |
сързд
Cpae.t
