пертый элемент ИЛИ 30. Устройство может быть применено на микропроцессорных комплексах аппаратным или программным способом. Эконтмическая эффективность
ного металла из-за сокращения времени ва- куумирования, так как используется достоверная информация о положении торца патрубка вакуум-камеры на всех циклах ва
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля массы металла, прошедшего через вакуумкамеру при вакуумировании | 1990 |
|
SU1786114A1 |
| Система программного управления процессом порционной вакуумной обработки стали | 1989 |
|
SU1684347A2 |
| Устройство для управления моталкой сортового стана | 1986 |
|
SU1357199A1 |
| Устройство контроля массы металла, прошедшего через вакуум-камеру при вакуумировании | 1988 |
|
SU1502627A1 |
| УСТРОЙСТВО ПОИСКА ИНФОРМАЦИИ | 1999 |
|
RU2149446C1 |
| Система управления циклами подачи сыпучих материалов в вакууматор | 1987 |
|
SU1452845A1 |
| Анализатор сигнала тактовой синхронизации | 1990 |
|
SU1781834A2 |
| Устройство автоматического контроля режимов работы порционного вакууматора | 1990 |
|
SU1721098A2 |
| Одноразрядный десятичный сумматор- ВычиТАТЕль | 1977 |
|
SU807275A1 |
| УСТРОЙСТВО ПОИСКА ИНФОРМАЦИИ | 1997 |
|
RU2116670C1 |
Изобретение относится jc автоматизации процесса вакуумирования стали в вакуумных установках порционного типа и предназначено для использования в программных системах управления для коррекции кинематических погрешностей механизма перемещения вакуум-камеры. Цель - упрощение устройства и расширение функциональных возможностей. Устройство содержит вакуум-камеру 1 с всасывающим патрубком 2, погружаемым в ковш 3 с металлом, механизмом 4 перемещения, редуктор 5, датчик 6 импульсов, счетчик 7 положения, 5лок 8 памяти, сумматор-вычитатель 9, первый вычитатель 10 и сумматор 11, во- семь компараторов 12-19, первый элемент :/1ЛИ 20, счетчик 21 интервалов, дешифратор 22, второй элемент ИЛИ 23, элемент НЕ 24, третий элемент ИЛИ 25, второй и третий вычитатели 26 и 27, сумматоры 28 и 29, Ё Ч| О О о о 00
достигается за счет увеличения выхода год- куумирования. 2 ил,
Изобретение относится к автоматизации процесса вакуумирования стали в ваку- умных установках порционного типа сталеплавильного производства и предназначено для компенсации систематических ошибок положения конечных звеньев механизма перемещения вакуум-камеры, вызванных, например, кинематическими погрешностями передач, нелинейностью характеристик и систематической погрешностью датчиков положения в системах программного управления.
Цель изобретения - упрощение устройства, расширение функциональных возможностей обеспечения коррекции нелинейности датчика положения патрубка.
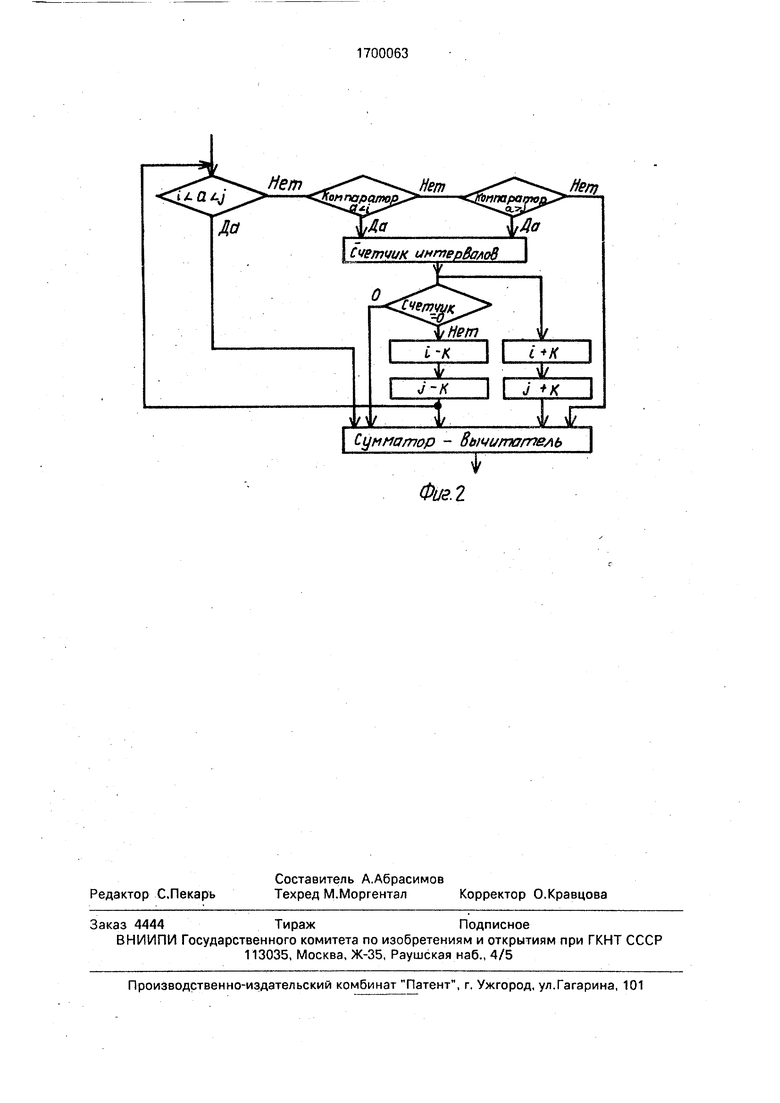
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - граф-схема алгоритма работы устройства.
Устройство содержит вакуум-камеру 1 с всасывающим патрубком 2, погружаемым в ковш 3 с металлом, механизм перемещения, состоящий из коромысла с укрепленной на нем вакуум-камерой, ось которого через ры- чажно-кулисное звено 4 и редуктор 5 кинематически связана с датчиком 6 импульсов, первый выход которого соединен с R-вхо- дом счетчика 7 положения, суммирующий (+) и вычитающий (-) входы соответственно соединены с вторым и третьим входами датчика 6 импульсов.
В устройство дополнительно введены блок 8 памяти, сумматор-вычитатель 9, первый вычитатель 10, первый сумматор 11, с первого по восьмой компараторы 12-19, первый элемент ИЛИ 20, счетчик 21 интервалов, дешифратор 22, второй элемент ИЛИ 23, элемент НЕ 24, третий элемент ИЛИ 25, второй и третий вычитатели 26 и 27, второй и третий сумматоры 28 и 29, четвертый элемент ИЛИ 30, причем выход первого разряда счетчика 7 положения соединен с управляющим входом блока 8 памяти, информационный выход которого соединен с вторым входом сумматора-вычитателя 9, I, j-выходы блока 8 памяти соединены с вторыми входами соответственно первого вы- читэтеля 10 и первого сумма гора 11, Первые входы первого вычитателч 10 и сумматора 11 объединены и соответственно соединены с первым входом сумматора-вычитателя 9 и с первым входом соответственно первого, второго, третьего и четвертого компараторов 12, 13, 14 и 15, вторые входы которых
соединены соответственно с выходами первого вычитателя 10 и первого сумматора 11, а также с первыми входами соответственно пятого, шестого, седьмого и восьмого компараторов 16, 17, 18 и 19, второго вычитателя 26 и второго сумматора 28, третьего вычитателя 27 и третьего сумматора 28, а 1-выход первого компаратора 12 и а j-выход второго компаратора 13 соединены через первый элемент ИЛИ 20 с управляющим входом третьего компаратора 14, а i-выход которого соединен с вычитающим (-) входом счетчика 21 интервалов, а а -выход- с управляющим входом четвертого компаратора ;, а j-выход которого соедииен с суммирующим (+) входом счетчика 21 интервалов, выход которого соединен с входом адреса блока 8 памяти, а через дешифратор 22 и второй элемент ИЛИ 23 и элемент НЕ 24 - с первым входом третьего элемента
ИЛИ 25, второй и третий входы которого соединены соответственно с а i-выходом первого компаратора 12 и а j-выходом второго компаратора 13, Четвертый и пятый входы третьего элемента ИЛИ 25 соединены
соответственно с выходами пятого и шестого компараторов 16 и 17, вторые входы которых соединены соответственно с выходами второго и третьего вычитателей 26 и 27. Вторые входы их объединены и
соединены с выходом второго элемента ИЛИ 23 и с вторыми входами второго и третьего сумматоров 28 и 29, третьи входы которых объединены с третьими входами второго и третьего вычитателей 26 и 27 и
соединены с К-выходом блока 8 памяти.
Выходы второго и третьего сумматоров 28 и 29 соединены соответственно с вторыми входами седьмого и восьмого компараторов 18 и 19, выходы которых соединены
соответственно с первым и вторым входами четвертого элемента ИЛИ 30 трети вход которого соединен с а j-выходом четвертого компаратора 15, а выход - с СУММИРУЮ щим (+) входом сумматооа-вычитятрчч о
вычитающий (-) вход которого соединен с выходом третьего элемента ИЛИ 25, выход сумматора-вычитателя 9 соединен с выходом устройства.
Механизм перемещения с рычажно-ку- лисным звеном 4 может иметь различные модификации. Рычажно-кулисное звено 4 предназначено для увеличения угла отсчета перемещения коромысла, на котором установлена вакуум-камера,
В качестве датчика 6 импульсов могут быть применены датчики типа ПДФ-3, ДИФ-5М и другие, преобразующие линейные перемешения вакуум-камеры с помощью передаточного звена 4 и редуктора 5 во вращательное движение датчика им- пульсов,
Датчик 6 импульсов встроен в путевой выключатель типа БГФ11-01 с несколькими зонами отсчета. Это упрощает установку датчика на заданное положение и его настройку и позволяет выставить любые значения реперных точек при наладке.
Счетчик 7 положения может быть выполнен на микросхеме К155ИЕ6.
Блок 8 памяти можно реализовать на ППЗУтипа К573РФ21, К588РР11 и др.
Сумматор-вычитатель 9 можно выполнить на микросхемах К555ИМ5 К1500ИМ180. Вычитатели 10,26 и 27 легко реализуются на микросхемах К155ИМЗ, К555ИМ6. Сумматоры 11, 28, 29 можно выполнить на микросхемах К555ИМ6, компараторы 12 - 19 можно выполнить на микросхемах К555СГИ, а счетчик 21 интервалов - на микросхеме К155ИЕ6.
Дешифратор 22 можно реализовать на микросхеме К155ИДЗ, элемент НЕ - на К155ЛН2,
Устройство может быть выполнено как на аппаратных, так и на программируемых средствах с применением микропроцессорной техники.
Устройство для коррекции кинематических погрешностей механизма перемещения вакуум-камеры работает следующим образом.
Из исходной позиции вакуум-камера 1 с всасывающим патрубком 2 погружается в ковш 3 с металлом при помощи механизма 4 перемещения, рычажно-кулисное звено которого через редуктор 5 связано с датчиком б импульсов.
При опускании вакуум-камеры 1 на втором и третьем выходах датчика 6 импульсов формируются сигналы. Эти сигналы поступают соответственно на суммирующий (+) и вычитающий (-) входы счетчика 7 положения. На разрядных выходах счетчика 7 формируется код, пропорциональный величине
перемещения вакуум-камеры 1. С первого разряда счетчика 7 положения поступает сигнал на управляющий вход блока 8 памяти,
5На разрядных выходах счетчика 7 положений формируется код, пропорциональный величине перемещения всасывающего патрубка 2 аакуум-камеры. Исходную зависимость положения вакуум-камеры разби- зают на разные интервалы р. Число интервалов р выбирают исходя из требуемой точности воспроизводимой функциональной зависимости, В данном случае число интервалов р принято равным 30 с 5 нулевой точкой посередине. Это значительно упрощает устройство в целом. Каждый интервал ограничен I - нижней границей и j - верхней границей. Каждая точка интервала исходной зависимости имеет соответствую- 0 щее корректирующее число Qp. а каждый интервал имеет определенную длину k.
Эти величины исходной зависимости положения г- куум-камеры составляют программу коррекции нелинейности и кинема5 тических погрешностей механизма перемещения.
Программа состоит из Определенного чксла управляющих слов, которые имеют четьи--; Г Оны и бывают пяти видов: команда
0 JM --г.м нижней границы I корректирующего интервала; команда записи верхней грани- LJ: j корректирующего интервала; команда згпчси р - номеров интервала; команда записи k - длины интервала; команда записи
5 Qp - корректирующего числа для каждого интервала.
Вход программы в блок 8 памяти производится с помощью специального устройства (не показано) Записанная программа в
0 блоке 8 памяти хранится до следующей записи.
Разряды первых информационных 1-вы- ходов образуют первую зону памяти, которая предназначена для хранения i - нижней
5 границы корректирующего интервала. Разряды вторых информационных j-выходов образуют вторую зону памяти, которая предназначена для хранения j - верхней границы корректирующего интервала. Раз0 ряды третьих информационных Qp-выходов образуют третью зону, которая предназначена для хранения величины корректирующего числа Qp для каждого интервала. Разряды четвертых информационных К-вы5 ходов образуют четвертую зону, которая предназначена для хранения k - длины интервала.
Адресация и чтение содержимого всех четырех зон выполняется параллельно в со0 ответствии с кодом адреса.
Операторы алгоритма, представленные на фиг. 2, выполняют: контроль текущего положения вакуум-камеры в пределах границ I и J; контроль текущего (а) положения за i - нижнюю границу; контроль текущего (а) положения за J - верхнюю границу; счетчик интервалов производит отсчет интервалов р, причем при опускании вакуум-камеры интервалы убывают, а при подъеме вакуум- камеры возрастают. Это продолжается до тех пор, пока I - нижнюю границу не займет J - верхняя граница интервала и, наоборот, j - верхнюю границу не займет I - нижняя граница интервала при опускании вакуум- камеры. В каждом корректирующем интервале и при выходе из корректирующего интервала производится коррекция текущего (а) положения путем прибавления к нему корректирующего числа Qp при опускании вакуум-камеры или вычитания от него Qp при подъеме вакуум-камеры.
Цикл коррекции нелинейности и кинематических погрешностей механизма перемещения вакуум-камеры начинается после ввода программы в блок 8 памяти, в сумма- торе-вычитателе 9 производится суммирование или вычитание корректирующей величины Qp в зависимости от направления перемещения вакуум-камеры.
В первом вычитателе 10 определяется текущая нижняя граница интервала, а в первом сумматоре 11 - текущая верхняя граница интервала. С помощью первого и второго компараторов 12 и 13 контролируется нахождение текущего положения вакуум-камеры в пределах I и J. Если текущее положение (а) вакуум-камеры находится в пределах границ I и J, то к нему прибавляется или вычитается корректирующая величина Qp на этом интервале.
Если текущее положение (а) вакуум-камеры переходит через границу I или j, то запускается третий или четвертый компаратор 14 или 15 и включается в работу пятый, шестой, седьмой и восьмой компараторы 16, 17, 18 и 19. Сигнал с выхода первого элемента ИЛИ 20 включает третий компаратор 14. Если текущее положение (а) вышло за I - нижнюю границу, то сигнал с а 1-выхода третьего компаратора 14 из счетчика 21 интервалов производит вычитание одного интервала. В том случае, когда текущее положение (а) вышло за j-верхнюю границу, то сигнал с а j-выхода четвертого компаратора 15 в счетчике 21 интервалов производит прибавление одного интервала. Код с выхода счетчика 21 интервалов поступает на вход адреса блока 8 памяти. Адресация и чтение содержимого четырех зон блока 8 памяти выполняется параллельно в соответствии с кодом, поступающим с выхода счетчика 21 интервалов.
Дешифратор 22 и второй элемент ИЛИ 23 служат для расшифровки корректирующего интервала. Элемент НЕ 24 предназначен для введения коррекции при достижении торцом патрубка исходного положения или нулевой позиции, т.е. уровня металла - в этих точках счетчик 21 интерва0 лов имеет нулевой код.
Сигнал на выходе третьего элемента ИЛИ 25 определяет подъем вакуум-камеры и поэтому сумматор-вычитатель 9 производит вычитание от текущего положения (а)
5 величины коррекции Qp.
Второй и третий вычитатели 26 и 27 служат для смещения корректирующего интервала при подъеме вакуум-камеры, а второй и третий сумматоры 28 и 29 - для смещения
0 корректирующего интервала при опускании вакуум-камеры. Наличие сигнала на выходе четвертого элемента ИЛИ 30 определяет опускание вакуум-камеры. По этому сигналу в сумматоре-вычитэтеле 9 производится
5 суммирование текущего положения (а) и величины коррекции Qp. На выходе суммато- ра-вычитателя 9 получается код откорректированного текущего положения.
Структурная схема устройства позволя0 ет расширить его функциональные возможности, линеаризовать выходные характеристики устройства и компенсировать «шибки положения торца патрубка вакууми- рования на всем диапазоне перемещения
5 при отработках циклов вакуумирования.
Применение устройства позволяет повысить точность позиционирования торца патрубка вакуум-камеры, упростить настройку. Упрощение достигается за счет то0 го, что диапазон разбит на две симметричные части с нулевой точкой посередине.
Реализация устройства позволит значительно повысить точность позиционирова5 ния торца патрубка вакуум-камеры, оптимизировать процесс вакуумирования за счет достоверности информации в каждом цикле вакуумирования. Экономическая эффективность достигается за счет увеличе0 ния выхода годного металла вследствие повышения точности позиционирования торца патрубка вакуум-камеры, что, в свою очередь, сокращает время вакуумирования. Формула изобретения
5 Устройство для коррекции кинематических погрешностей механизма перемещения ваккум-камеры, преимущественно с вакуум-камерой с вэсывающим патрубком. погружаемым в ковш с металлом, механизмом перемещения, состоящим из коромысла с укрепленной на нем вакуум-камерой, содержащее датчик импульсов, соединенный кинематически через редуктор и рычаж- но-кулисное звено с осью коромысла, первый выход которого соединен с R-входом счетчика положения, суммирующий и вычитающий входы соответственно соединены с вторым и третьим входами датчика импульсов, отличающееся тем, что, с целью упрощения устройства, расширения функ- циональных возможностей, в него введены блок памяти, сумматор-вычитатель, первый вычитатель, первый сумматор, первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой компараторы, первый элемент ИЛИ, счетчик интервалов, дешифратор, второй элемент ИЛИ, элемент НЕ, третий элемент ИЛИ, второй и третий вычи- татели, второй и третий сумматоры, четвертый элемент ИЛИ, причем выход первого разряда счетчика положения соединен с управляющим входом блока памяти, информационный выход которого соединен с вторым входом сумматора-вычитателя, а первый и второй выходы блока памяти соединены с вторыми входами соответственно первого вычитателя и первого сумматора, первые входы первого вычитателя и сумматора объединены и соответственно соединены с первым входом сумматора-вычитателя и с первым входом соответственно первого, второго, третьего и четвертого компараторов, вторые входы которых соединены соответственно с выходами первого вычитателя и первого сумматора, а также с первыми входами соответственно пятого, шестого, седьмого и восьмого компараторов, второго вычитателя и второго сумматора, третьего вычитателя и третьего сумматора, первый выход первого компаратора и первый выход
второго компаратора соединены через первый элемент ИЛИ с управляющих входом третьего компаратора, первый выход которого соединен с вычитающим входом счетчика интервалов, а второй выход - с управляющим входом четвертого компаратора, первый выход которого соединен с суммирующим входом счетчика интервалов, выход которого соединен с входом адреса блока памяти, а через дешифратор и второй элемент ИЛИ и элемент НЕ - с первым входом третьего элемента ИЛИ, второй и третий входы которого соединены соответственно с вторым выходом первого компаратора и вторым выходом второго компаратора, четвертый и пятый входы третьего элемента ИЛИ соединены соответственно с выходами пятого и шестого компараторов, вторые входы которых соединены соответственно с выходами второго и третьего вы- читателей, вторые входы которых объединены и соединены с выходом второго элемента ИЛИ и с вторыми входами второго и третьего сумматоров, третьи входы которых объединены с третьими входами второго и третьего вычитателей и соединены с третьим выходом блока памяти, выходы второго и третьего сумматоров соединены соответственно с вторыми входами седьмого и зосьмого компараторов, выходы которых соединены соответственно с первым и вторым входами четвертого элемента ИЛИ, третий вход которого соединен с вторым выходом четвертого компаратора, а выход - с суммирующим входом сумматора-вычитателя, вычитающий вход которого соединен с выходом третьего элемента ИЛИ, а выход сумматора-вычитателя - с выходом устройства.
До
{ Сумматор - Вычитатель |
Фиг.2
Нет
Счетчик интервалов
J-К | j J +К|
(
JL
JT
| Двухкоординатная система позиционирования | 1972 |
|
SU470793A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для формирования корректирующих сигналов кинематических погрешностей | 1984 |
|
SU1224792A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Устройство автоматического контроля режимов работы порционного вакууматора | 1987 |
|
SU1482957A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
