Изобретение относится к автоматизации процесса вакуумирования стали в вакуумных установках порционного типа в сталеплавильном производстве, может быть использовано при исследовании про- .цессов порционного вакуумирования для различных марок стали и является усовершенствованием устройства по авт.ев. № 1482957.
Цель изобретения - повышение точности контроля погружения торца патрубка ва- куум-камеры в ковш относительно уровня металла, сокращения времени вакуумирования за счет получения достоверной информации положения торца патрубка вакуум-камеры относительно уровня металла, повышения стабильности процесса, а также расширение функциональных возможностей.
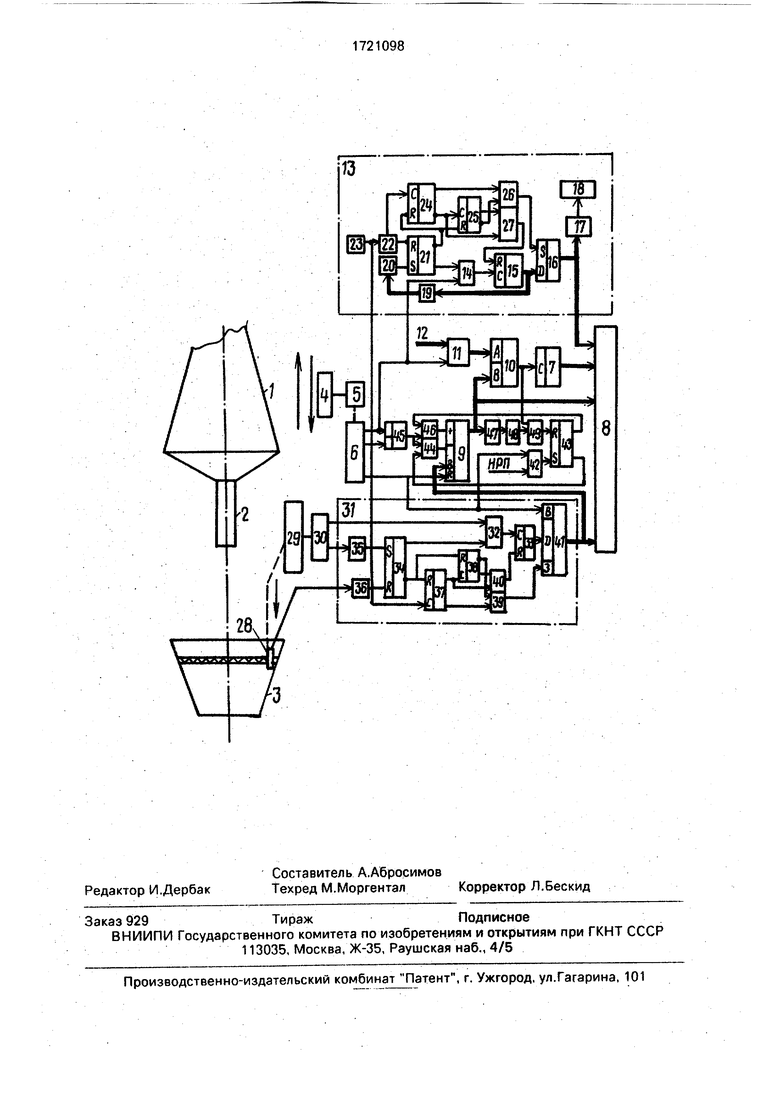
На чертеже приведена блок-схема устройства.
Устройство автоматического контроля режимов работы порционного вакууматора состоит из вакуум-камеры 1 с всасывающим патрубком 2, погруженным в ковш 3 с металлом, механизма 4 перемещения вакуум-камеры, кинематически связанного через редуктор 5 с датчиком 6 импульсов, счетчика
7числа ходов, выходы которого соединены с входами показывающего прибора 8. Первый выход датчика 6 импульсов соединен с R-входом счетчика 9 .амплитуды качания, разрядные выходы которого соединены с вторыми входами показывающего прибора
8и В-входом компаратора 10, А-входы которого соединены с разрядными выходами коммутатора 11. Информационный вход последнего соединен с шиной 12 задания верхнего уровня погружения патрубка, а
Ш&Л
-ч
ю О
ю
00
ю
управляющий вход его - с третьим выходом датчика 6 импульсов, через вход измерителя 13 скорости патрубка - с первым входом элемента И-НЕ. 14, выход которого соединен со счетным входом счетчика 15 скорости. Выходы последнего соединены с D-входами регистра 16 записи, выходы которого через цифроаналоговый преобразователь 17 соединены г самопишущим прибором 18 и непосредственно с третьим входом показывающего прибора 8, и через дешифратор 19 кода и элемент ИЛ И 20. B-cS-вхо- дом триггера 21 отсчета, прямой выход которого соединен с вторым входом элемента И-НЕ 14, R-вход триггера 21 отсчета соединен с первым выходом делителя 22 частоты, вход которого соединен с выходом генератора 23 тактовых импульсов.
Второй выход делителя 22 частоты соединен с С-входом первого D-триггера 24, R-вход которого соединен с инверсным выходом триггера 21 отсчета и с R-входом второго D-триггера 24, С-вход которого соединен с инверсным выходом первого D- триггера 24. Прямой выход его соединен с первым входом первого элемента И 26, выход которого соединен с S-входом регистра 16 записи, а второй вход его - с инверсным выходом второго D-триггера 25, прямой выход и С-вход которого соответственно соединены с первым и вторым входами второго элемента И 27, выход которого соединен с R-входами счетчика 15 скорости.
В устройство введены также измерительный зонд 28 с механизмом 29 перемещения, кинематически связанным с датчиком 30 положения зонда и измеритель 31 уровня металла. Первый выход датчика 30 положения зонда соединен с первым входом второго элемента И-НЕ 32, выход которого соединен с С-входом счетчика 33 уровня металла, а его второй вход - с прямым выходом триггера 34 измерения, S- вход которого соединен через одновибратор 35 с вторым выходом датчика 30 положения зонда.
Выход измерительного зонда 28 через преобразователь 36 соединен с R-входом триггера 34 измерения, инаерсный выход которого соединен с R-входом триггера 37 записи и триггера 38 сброса, С-вход которого соединен с инверсным выходом триггера 37 записи, прямой выход которого соединен с первым входом третьего элемента И 39, второй вход которого-соединен с инверсным выходом триггера 38 сброса, прямой выход и С-вход которого соединены соответственное первым и вторым входами четвертого элемента И 40, выход которого .соединен с R-входом счетчика 33 уровня металла, информационный выход которого соединен с D-входом блока 41 памяти, 3-вход Запись которого соединен с выходом третьего элемента И 39.
Информационный выход блока 41 памяти соединен с четвертым входом показывающего прибора 8 и D-входом счетчика 9 амплитуды качания, R-вход которого соединен с первым выходом датчика 6 импульсов,
с В-входом Выборки блока 41 памяти и с первым входом первого элемента ИЛИ-НЕ 42, второй вход которого соединен с шиной достижения торцом патрубка заданного нижнего рабочего положения (не показано).
Выход первого элемента ИЛИ-НЕ 42 соединен с S-входом триггера 43 переключения, прямой выход которого соединен с первым входом пятого элемента И 44, выход которого соединен с вычитающим (-) входом счетчика 9 амплитуды качания, а второй вход этого элемента соединен через второй элемент ИЛИ 45 с первым и вторым выходами датчика 6 импульсов и объединен с вторым входом шестого элемента И 46.
Инверсный выход триггера 43 переключения соединен с первым входом шестого элемента И 46, выход которого соединен с суммирующим (+) входом счетчика 9 амплитуды качания, информационный выход которого через дешифратор 47 кодов и второй элемент И-НЕ 48 соединен с первым входом третьего элемента ИЛИ-НЕ 49, второй вход которого соединен с выходом компаратора 10. Выход третьего элемента ИЛИ-НЕ 49
соединен с R-входом триггера 4 переключения, а С-вход триггера 34 записи соединен с выходом генератора 23 тактовых импульсов измерителя 13 скорости.
В качестве измерительного зонда 28 может быть применено известное устройство. Граница раздела шлака и металла определяется по величине ЭДС.
Механизм 29 перемещения измерительного зонда 28 может иметь различные модификации.
Датчиком 30 положения зонда может быть ПДФ-3, импульсы которых соответствуют линейным перемещениям зонда.
Счетчик 33 уровня металла может быть
выполнен на микросхеме К155 ИЕ6.
Блок 41 памяти можно реализовать на микросхемах К572РФ5 или других.
Устройство автоматического контроля режимов работы порционного вакууматора
работает следующим образом.
Перед началом процесса вакуумирова- ния вакуум-камеру 1 с всасывающим патрубком 2 устанавливают в исходное положение и производят замер уровня металла в ковше 3 относительно его кромки борта.
После выполнения подготовительных операций вакуум-камеру 1 с всасывающим патрубком 2 из исходного положения опу- екают в ковш 3 с металлом с помощью механизма 4- перемещения вакуум-камеры, который через редуктор 5 кинематически связан с датчиком 6 импульсов. При этом счетчик 7 числа ходов, показывающий при- бор 8 и другие элементы устанавливаются в исходное состояние.
При движении вакуум-камеры 1 на втором и третьем выходах датчика 6 импульсов формируются сигналы. В момент сближе- ния торца всасывающего патрубка 2 с уровнем кромки борта производят настройку механизма 4 перемещения вакуум-камеры путем установки датчика 6 импульсов в положение, при котором с первого(реперного) выхода датчика 6 импульсов выдается короткий импульс, передний фронт которого по R-входу сбрасывает счетчик 9 амплитуды качания в О. В этот момент торец всасывающего патрубка 2 достигает уровня кромки борта ковша 3, а счетчик 9 амплитуды качания на своих разрядных выходах имеет нулевой код.
Код с выхода счетчика 9 амплитуды качания поступает на В-входы компаратора 10, на А-входы которого подается код задания с выходов коммутатора 11. Через по- следний по шине 12 задается верхний уровень погружения патрубка 2. Это задание поступает либо непосредственно от АСУ ТП в автоматическом режиме, либо с пульта управления при режиме Совет мастеру.
При перемещении патрубка 2 с третьего выхода датчика 6 импульсов на вход изме- рителя 13 скорости патрубка поступают сигналы, которые затем поступают на первый вход элемента И-НЕ 14 измерителя 13 скорости с дискретностью 1 мм ход патрубка. С выхода элемента И-НЕ 14 сигналы поступа- ют на счетный вход счетчика 15 скорости. Счет импульсов в нем производится в течение 1 с. На выходе счетчика .15 скорости формируется код скорости перемещения патрубка 2, который каждый раз после исте- .чения секундного диапазона перезаписывается в регистр 16 записи.
Величина измеренной скорости с выхода регистра 16 записи через цифроаналого- вый преобразователь 17 поступает на самопишущий прибор 18 и непосредственно с выхода регистра 16 записи - на третий вход показывающего прибора 8, где индицируется текущее значение скорости патрубка 2.
После перезаписи содержимого счетчика 15 скорости в регистр 16 записи счетчик 15 обнуляется. При этом на выходы дешифратора 19 кода поступает сигнал нулевого уровня и на выходе элемента ИЛИ 20 также присутствует сигнал О.
Этим сигналом триггер 21 отсчета устанавливается в единичное состояние. Сигнал 1 с прямого выхода триггера 21 отсчета разрешает прохождение импульсов от датчика 6 через первый вход элемента И-НЕ 14 на счетный вход счетчика 15 скорости. Последний производит отсчет импульсов с дискретностью 1 мм хода всасывающего патрубка 2. По окончании времени, равном 1 с от начала поступления импульсов на счетный вход счетчика скорости, триггер 21 отсчета задним фронтом секундного импульса с первого выхода делителя 22 частоты устанавливается .
Сигнал О с прямого выхода триггера 21 отсчета накладывает запрет на элемент И-НЕ 14 и сигналы от датчика 6 импульсов на счетный вход счетчика 15 скорости не проходят.
Тактовые импульсы с второго выхода делителя 22 частоты от генератора 23 тактовых импульсов поступают на С-вход первого D-триггера 24. С инверсного выхода триггера 21 отсчета сигнал 1 с R-входов первого 24 и второго 25 D-триггеров снимает запрет. На выходе первого элемента И 26 формируется сигнал, по которому производится перезапись содержимого счетчика 15 скорости в регистр 16 записи. После этого на выходе второго элемента И 27 формируется сигнал, по которому обнуляется счетчик 15 скорости. Процесс измерения скорости хода патрубка 2 вакуум-камеры повторяется до полного останова.
Для повышения стабильности процесса вакуумирования, а также исключения подсоса в вакуум-камеры через всасывающий патрубок торец патрубка в верхнем рабочем положении должен быть погружен на определенную глубину относительно уровня металла. Поэтому перед первым циклом вакуумирования всегда измеряют толщину слоя шлака и уровень металла.
Измерение уровня металла производят следующим образом.
Измерительный зонд 28 с помощью механизма 29 перемещения опускают из исходного положения в ковш с металлом 3.
При перемещении измерительного зонда 28 с первого выхода датчика 30 положения зонда через вход измерителя 31 уровня металла и первый вход второго элемента И-НЕ 32 поступают импульсы, с выхода элемента И-НЕ 32 импульсы не поступают на
С-вход счетчика 33 уровня металла, так как второй вход элемента И-НЕ 32 закрыт нулевым сигналом с прямого выхода триггера 34 измерения.
Триггер 34 измерения устанавливается в 1 импульсом с выхода одновибратора 35, „который запускается передним фронтом сигнала с второго выхода (реперная точка) датчика 30 положения зонда. При этом производят настройку датчика 30 положения зонда таким образом, чтобы в момент сближения измерительного зонда 28 на втором выходе датчика 30 положения формировался короткий сигнал.
Сигнал 1 с прямого выхода триггера 34 измерения открывает второй элемент И- НЕ 32 и импульсы с первого датчика 30 положения зонда поступают на С-вход счетчика 33 уровня металла, который производит отсчет импульсов, пропорциональных перемещению измерительного зонда 28 относительно кромки ковша 3. :
В момент перехода измерительного зонда 28 из шлака в металл по величине ЭДС определяется граница раздела фазы шлака и металла и на выходе преобразователя 36 появляется сигнал, который устанавливает по R-входу триггера 34 измерения в О. Сигнал О с прямого выхода триггера 34 записи накладывает запрет на второй вход второго элемента 1/1-НЕ 32. Прерываются импульсы от датчика 30 положения зонда на С-вход счетчика 33 уровня металла, который прекращает отсчет импульсов. Сигнал. 1 инверсного выхода триггера 34 измерения с R-входов триггера 37 записи и триггера 38 сброса снимает запрет. Тактовые импульсы с выхода генератора 23 тактовых импульсов измерителя 13 скорости поступают на С-вход триггера 34 записи. На выходе третьего элемента И 39 формируется сигнал, по которому производится перезапись содержимого счетчика 33 уровня металла в блок 41 памяти, где величина измеренного уровня металла хранится до следующего измерения.
После перезаписи вторым тактом на выходе четвертого элемента И 40 формируется сигнал, который обнуляет счетчик 33 уровня металла, а измерительный зонд 28 поднимает в исходное положение. После установки измерительного зонда 28 в исходное положение производят опускание вакуум-камеры 1 с всасывающим патрубком 2 в ковш 3 с металлом. В момент достижения торцом патрубка 2 уровня кромки борта ковша 3 по заднему фронту сигнала с первого выхода (реперного) датчика б импульсов производится выборка из блока 41 памяти измеренного уровня металла, который поступает на
четвертый вход показывающего прибора 8 и записывается по D-входу в счетчик 9 амплитуды качания. Этим же сигналом через первый элемент ИЛИ-НЕ 42 триггер 43
переключения устанавливается в 1. Сигнал 1 с прямого выхода триггера 43 переключения разрешает прохождение импульсов через пятый элемент И 44 на вычитающий (-) вход счетчика 9 амплитуды качания от первого и второго выходов датчика 6 импульсов через второй элемент ИЛИ 45. При этом закрыт шестой элемент И 46 сигналом О с инверсного выхода триггера 43 переключения.
После отсчета измеренного уровня металла счетчик 9 амплитуды качания устанавливается в О и на выходы дешифратора 47 кода поступает сигнал нулевого уровня. На выходе второго элемента И-НЕ 48 также
присутствует сигнал О, который поступает на первый вход третьего элемента ИЛИ-НЕ 49, на второй вход которого поступает сигнал Достижения торцом патрубка верхнего рабочего положения с выхода устанавливает триггер переключения в О. Единичный сигнал 1 с инверсного выхода триггера 43 переключения открывает шестой элемент И 46 и импульсы через второй элемент ИЛИ 45 поступают с первого и второго выходов датчика 6 импульсов на суммирующий (+) вход счетчика 9 амплитуды качания. С этого момента .счетчик 9 амплитуды качания производит сложения. В момент достижения торцом патрубка нижнего рабочего положения на шине 50 появляется сигнал 1, который через первый элемент ИЛИ-НЕ 42 устанавливает триггер 43 переключения в 1.
Сигнал 1 с прямого выхода триггера
43 переключения снова открывает первый элемент И 44. Вакуум-камера движется вверх и счетчик 9 амплитуды качания производит вычитание импульсов. В момент достижения торцом патрубка верхнего
рабочего положения на выходе компаратора 10 появляется сигнал 1, который через второй вход третьего элемента ИЛИ-НЕ 49 устанавливает триггер 43 переключения в О и счетчик 9 амплитуды качания переключается на сложение (+). Циклы качания повторяются до окончания обработки.
В конце процесса вакуумирования вакуум-камеру 1 с всасывающим патрубком 2 поднимают в исходное положение. При этом патрубок 2 выводится из ковша 3 с металлом. При переходе торца патрубка 2 через уровень металла в ковше счетчик 9 амплитуды качания сигналом с первого выхода датчика 6 импульсов сбрасывается в
О, что исключает возможность накопления ошибок от случайных помех.
Устройство может быть реализовано как аппаратным, так и программным путем на базе микропроцессорной техники или на программируемом контроллере типа МУ 58.02, МБ 57.01.
Предлагаемое устройство позволяет получить достоверную информацию об уровне металла в ковше, производить не- прерывный контроль амплитуды качания вакуум-камеры и числа ходов на протяжении всего цикла вакуумирования а также измерять скорость перемещения патрубка. Наличие нескольких зон отсчета позволяет упростить настройку положения торца всасывающего патрубка относительно уровня металла в ковше.
Экономический эффект достигается за счет увеличения выхода годного металла вследствие сокращения времени вакууми- рования и ведения оптимального процесса вакуумирования, а также снизить время на доводку марок стали с отклонением химсостава.
Формула изобретения
Устройство автоматического контроля режимов работы порционного вакууматора по авт.св. № 1482957, отличающееся тем, что, с целью повышения точности кон- троля погружения торца патрубка вакуум- камеры в ковш относительно уровня металла, сокращения времени вакуумирования за счет получения достоверной информации положения торца патрубка вакуум-камеры относительно уровня металла, повышения стабильности процесса, а также расширения функциональных возможностей, в него введены измерительный зонд с механизмом перемещения, кинема- тически соединенным с датчиком положения зонда, измеритель уровня металла, причем первый выход датчика положения зонда соединен с первым входом второго элемента И-НЕ, выход которого соединен с С-входрм счетчика уровня металла, а его второй вход - с прямым выходом триггера измерения. S-вход которого соединен через одновибратор с вторым выходом датчика
положения зонда, выход которого через преобразователь соединен с R-входом триггера измерения.инверсный выход которого соединен с R-входом триггера записи и триггера сброса, С-вход которого соединен с инверсным выходом триггера записи, прямой выход которого соединен с первым входом третьего элемента И. второй вход которого соединен с инверсным выходом триггера сброса, прямой выход и С-вход которого соединен соответственно с первым и вторым входами четвертого элемента И, выход которого соединен с R-входом счетчика уровня металла, информационный выход которого соединен с D-входом блока памяти, 3-вход Запись которого соединен с выходом третьего элемента И, а информационный выход блока памяти соединен с четвертым входом показывающего прибора и D-входом счетчика амплитуды качания, R- вход которого соединен с первым выходом датчика импульсов, с В-входом Выборки блока памяти и с первым входом первого элемента ИЛ И-НЕ, второй вход которого соединен с шиной достижения торцом патрубка заданного нижнего рабочего положения, а выход первого элемента ИЛИ- НЕ с S-входом триггера переключения, прямой выход которого соединен с первым входом пятого элемента И. выход которого соединен с вычитающим (-) входом счетчика амплитуды качания, второй вход этого элемента соединен через второй элемент ИЛИ с первым и вторым выходами датчика импульсов и объединен с вторым входом шестого элемента И, инверсный выход триггера переключения соединен с первым входом шестого элемента И, выход которого соединен с суммирующим (+) входом счетчика амплитуды качания, информационный выход которого через дешифратор кодов, второй элемент И-НЕ соединен с первым входом третьего элемента ИЛ И-НЕ, второй вход которого соединен с выходом компаратора, а выход третьего элемента И Л И-НЕ - с R-входом триггера переключения, выход генератора тактовых импульсов измерителя скорости соединен с С-входом триггера записи.
.J

Изобретение относится к автоматизации процесса вакуумирования стали при внепеч- ной обработке и может быть использовано для исследования процессов порционного вакуумирования различных марок стали. Цель изобретения- повышение точности контроля погружения торца патрубка вакуум-камеры в ковш относительно уровня металла, сокращение времени вакуумирования, повышение стабильности процесса. Это достигается дополнительным введением измерительного зонда с механизмом перемещения, кинематически связанного с датчиком положения зонда, измерителя уровня металла. Устройство может быть реализовано как аппаратным, так и программным путем на базе микропроцессорной техники. 1 ил.
| Устройство автоматического контроля режимов работы порционного вакууматора | 1987 |
|
SU1482957A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
