Изобретение относится к области управления шахтной подъемной машиной и может быть использовано для управления движением подъемного сосуда как на скиповом, клетьевом, так и на проходческом подъеме.
Цель изобретения - повышение точности и надежности работы устройства.
На фиг.1 приведено устройство управления шахтной подъемной установкой; на фиг.2 - диаграмма скорости для направлений Вверх, Вниз.
Устройство состоит из датчика 1 перемещения, который отбирает дискретную информацию, например от вала подъемной машины. Первый выход датчика 1 соединен со счетным входом реверсивного счетчика 2, разрядные выходы .которого подключены к информЛ- ционным входа-М первого и второго блоков 3 и 4 задания режима движения и компаратора 5. Вторые входы компаратора 5 соеди1 ены с Быхода 1и блока 6 задания высоты подъема, а управляющие входы блоков 3 и 4 задания - с выходами элемента 7 памяти.
Выходы блоков 3 и 4 задания режгима движения подключены к входам синхронизации элементов памяти (триггеров) первой и второй групп 8 и 9 элементов памяти, информационные входы которых соединены с вторым выходом датчика 1, первым входом элемента HCK.T104AKUIEE ИЛИ 10 и через инвертор 11 и непосредственно подключены к первым входам первого и второго элементов И-НЕ 12 и 13.
Вторые входы элементов И-НЕ 12 и 13 соединены между собой и подключены к выходу компаратора 5, а выходы элементов И-НЕ 12 и 13 соединены с входами элемента 7 памяти. Второй пыход элемента 7 памяти подключен к второму входу элемента ИСКЛЮЧАЮЩЕЕ И:П: 10, выход которого соединен с управляющим входом реверсивного счетчика 2.
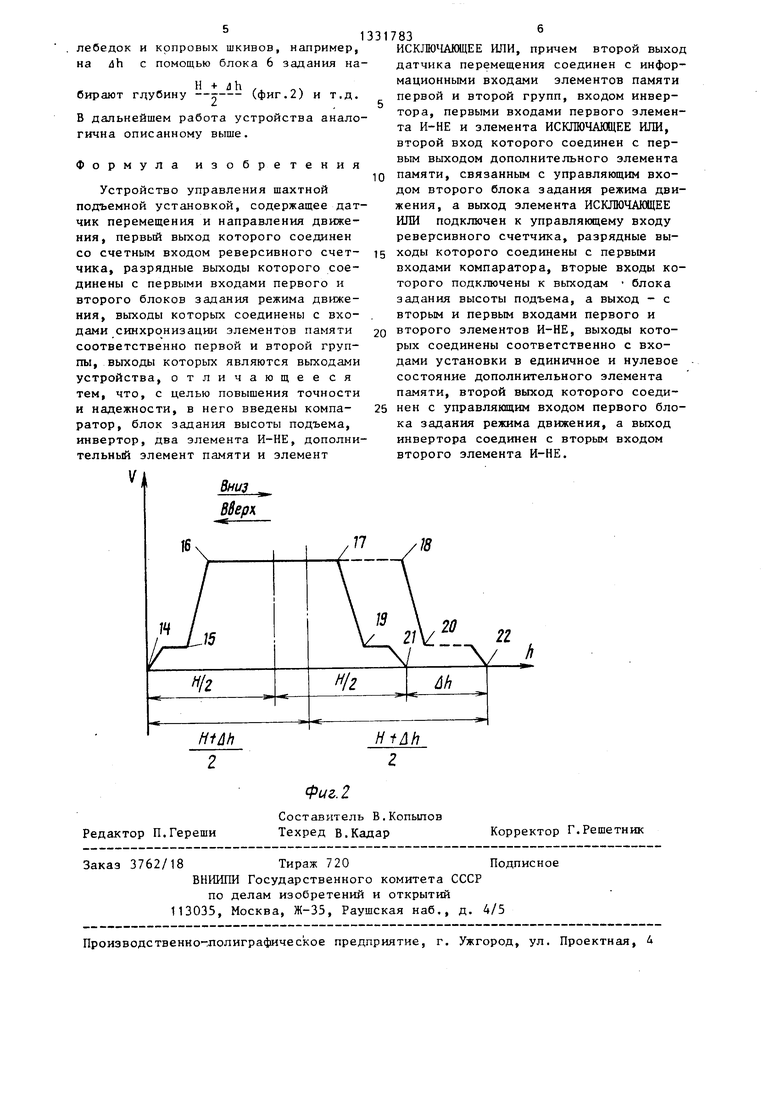
На диаграмме скорости показаны следующие коман:ш: .14 - на стопорение при движении Вверх ; 15 - на разгон при движенш Вниз и на дотягивание при движении Вверх ; 16 - равномерного хода маппшы при дв1шеи1да Вниз и на замедление при движении пверх ;
17- на зш-юдление при двккении Вниз и равномерного хода при движении Вверх для высоты подъема II ,
18- на замедление при дв;гжеиии
0
ь
0
Вниз и равномерного хода при движении Вверх .для высоты подъема Н+ ah; 19 - на дотяжку при движении Вниз и на разгон при движении Вверх для высоты подъема Н; 20 - на дотяжку при движении Вниз и на разгон при движении Вверх для высоты подъема Н + ;dh; 21 и 22 - на стопорение при движении Вниз.
Датчик 1 путевых и 1пульсов на своем первом выходе выдает дискретные сигналы, пропорциональные пути, пройденному подъемной машиной, например, с дискретностью 0,01 м.
На втором выходе датчик 1 путевых импульсов выдает сигнал логической Г при движении подъемной машины Вниз и сигнал логического О при дпижении подъемной машины Вверх.
Блоки 3 и 4 задания предназначены для программирования путевых команд (включения групп 8 и 9 элементов памяти) . В ка гестве блока программирования может быть использовано постоянное запоминающее устройство (ПЗУ) любого типа.
При малом количестве путевых команд на входы элементов 7 памяти групп 8 и 9 сигкал(м с выходов (разрядов) ПЗУ поступают непосредственно. При большом количестве путевых команд сигналы с выходов ПЗУ на входы элементов памяти поступают через дешифраторы, которые в этом случае могут входить в состав блоков 3 и 4 задания .
Компаратор 5 предназначен для сра- нп.енпя кодовых сигналов, поступающих с; разрядных выходов реверсивного счетчика 2 с кодовыми сигналами блока 6 задания высоты подъема. Блок 6 за- цгшия высоты подъема предназначен для задания в двоичном коде высоты работы подъемной установки.
Устройство работает следующим образом.
В блоке 6 производится установка половины расстояния ствола от нулевой площадки до забоя. При движении подъемной машины от нулевой плошадки Вниз с первого выхода датчика 1 на счетный вход реверсивного счетчика 2 поступают импульсы, пропорциональные пути пройденному подъемной машиной.
С второго выхода датчика 1 перемещения на информационные входы эле- г-шнтов памяти групп 8 и 9 на входы 1И1вертора 11, элементов И-НЕ 12 и 13
и элемента ИСКЛЮЧ ШЦЕЕ ШШ 10 поступает лог№(еский сигнал 1, соответствующий движению подъемной машины Вниз, В это время на втором входе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 10 присутствует сигнал О, вследствии чего на управляющем входе реверсивного счетчика 2 присутствует сигнал 1. Реверсивный счетчик 2 под действием счетных импульсов, поступающих на него с датчика 1, работает на сложение.
Сигналы, пропорциональные пути, пройденному шахтной подъемной машиной, с выхода реверсивного счетчика 2 поступают на входы компаратора 5, гд они сравниваются с заданной серединой пути, и на входы блоков 3 и 4 задания. На первьй блок 3 задания в это время с первого выхода элемента 7 памяти поступает разрешающ1й, а на второй блок 4 с второго выхода элемента 7 памяти - запрещающий сигнал. Следовательно с разрядных выходов первого блока 3 задания под действие реверсивного счетчика 2 на синхронизирующие входы первой группы 8 элементов памяти поступают сигналы, запрограмм}фованные в блоке 3 на задан- зо второму Д блокам памяти.
ных высотах подъема. Данные сигналы включают соответствующие элементы памяти. Которые и выдают путевые команды на привод подъемной машины до половины глубины ствола.
При достижении подъемной машиной половины глубины ствола Н/2 (фиг,2) на вьЕходе компаратора 5 появляется сигнал, который приводит к срабатыванию первого элемента И-НЕ 12, а следовательно, и изменению состояния элемента 7 памяти на противоположное. Элемент 7 памяти выдает запрет первому 3 и разрешение работы второму 4 блокам задания программы. При этом выход элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 10 изменит свой сигнал с Г на О, вследствие чего реверсивный счетчик 2 начнет работать на вычитание при движении подъемной машины далее Вниз,
Теперь с разрядных выходов второго блока 4 задания под действием реверсивного счетчика 2 на синхронизирующие входы другой группы 9 элементов 7 памяти поступают сигналы, запрограммированные во втором блоке 4 на заданных высотах подъема. Данные сигналы включают соответствующие элементы памяти, которые и выдают путевые
команды на привод подъемной машины после половины глубины ствола.
При движении подъемной машины в обратном направлении на втором выходе датчика 1 появляется сигнал О, под действием которого на выходе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 10 устанавливается сигнал Г и реверсивный счетчик 2 начинает работать на сложение, С разрядных выходов второго блока А задания в это время поступают сигналы на синхронизирующие входы второй группы 9 элементов памяти, которые выключают 5последние под действием сигнала О с второго выхода датчика 1, Выключение элементов памяти приводит к снятию путевых команд с привода подъемной машины во второй половине глубины ствола.
При достижении подъемной машиной половины глубины ствола Н/2 (фиг,2) на выходе компаратора 5 появляется сигнал, приводящий к срабатыванию второго элемента И-НЕ 13, соединенного с инвертором 11, вследствии чего элемент 7 памяти меняет свое состояние на противоположное, давая разрешение на работу первому 3 и запрет
0
5
Реверсивный счетчик 2 начинает работать на вычитание и с разрядных выходов первого блока 3 задания поступают сигналы на синхронизирующие входы элементов памяти первой группы 8, которые выключают последние под
0
действием сигнала О с датчика 1, Выключение остальных элементов 7 памяти приводит к снятию путевых команд с привода подъемной машины в первой половине глубины ствола.
Предлагаемое устройство может работать и с несколькими горизонтами, При этом в блоке 6 задания устанав- g ливается половина высоты до требуемого горизонта назначения, В дальнейшем работа устройства аналогична описанному выше. Возможность работы устройства с множеством горизонтов резко сокращает количество путевых команд, так как при управлении подъемной машиной с различным количеством горизонтов в предлагаемом техническом решении можно использовать одни и те же путевые команды.
Предлагаемое устройство может быть использовано и при управлении проходческой подъемной машиной. При перемещении полка Вниз с помощью полковых
0
5
лебедок и копровых шкивов, например, на йЬ с помощью блока 6 задания на
бирают глубину
И + Jh
(фиг.2) и т.д.
В дальнейшем работа устройства аналогична описанному выше.
Формула изобретения
Устройство управления шахтной подъемной установкой, содержащее датчик перемещения и направления движения, первый выход которого соединен со счетным входом реверсивного счетчика, разрядные выходы которого соединены с первыми входами первого и второго блоков задания режима движения, выходы которых соединены с входами синхро низации элементов памяти соответственно первой и второй группы, выходы которых являются выходами устройства, отличающее ся тем, что, с целью повышения точности и надежности, в него введены компаратор, блок задания высоты подъема, инвертор, два элемента И-НЕ, дополнительный элемент памяти и элемент
83
ИСКЛЮЧАЩЕЕ ИЛИ, причем второй выход датчика перемещения соединен с информационными входами элементов памяти первой и второй групп, входом инвертора, первыми входами первого элемента И-НЕ и элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, второй вход которого соединен с первым выходом дополнительного элемента памяти, связанным с управляющим входом второго блока задания режима движения, а выход элемента ИСКЛЮЧАЮЩЕЕ ИЛИ подключен к управляющему входу реверсивного счетчика, разрядные вы- ходы которого соединены с первыми входами компаратора, вторые входы которого подключены к выходам блока задания высоты подъема, а выход - с вторым и первьм входами первого и второго элементов И-НЕ, выходы которых соединены соответственно с входами установки в единичное и нулевое состояние дополнительного элемента памяти, второй выход которого соеди- нен с управляющим входом первого блока задания режима движения, а выход инвертора соединен с вторым входом второго элемента И-НЕ.
Вниз
///лл
ЯfZl/7
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления и контроля хода шахтной подъемной машины | 1985 |
|
SU1299932A1 |
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1990 |
|
SU1794844A1 |
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1987 |
|
SU1474061A1 |
| Устройство индикации местоположения сосуда шахтной подъемной машины | 1986 |
|
SU1411258A1 |
| Устройство для управления шахтной подъемной машиной | 1986 |
|
SU1502451A1 |
| Устройство программного управления и контроля хода шахтных подъемных машин | 1986 |
|
SU1446078A1 |
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1988 |
|
SU1553501A1 |
| Устройство управления проходческой подъемной установкой | 1979 |
|
SU861263A1 |
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1986 |
|
SU1382797A1 |
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1989 |
|
SU1745659A1 |
Изобретение касается управления шахтной подъемной и может быть использовано для управления движением подъемного сосуда как на скиповом, клетьевом, так и на проходческом подъеме, и обеспечивает повышение точности и надежности работы устройства. Устройство управления шахтной подъемной установкой содержит датчик 1 перемещения, реверсивный счетчик 2, два блока 3 и 4 задания режима движения и две группы 8 и 9 элементов памяти, а также компаратор 5, блок 6 задания высоты подъема, инвертор 11, два элемента И-НЕ 12 и 13, дополнительный элемент 7. памяти и элемент ИСКЛЮЧАЩЕЕ ИЛИ 10. При движении подъемной машины вниз или вверх с первого выхода датчика 1 поступают импульсы на счетный вход реверсивного счетчика 2, с разрядных выходов которого сигналы, пропорциональные проходческому пути, поступают в компаратор 5, где сравниваются с величиной, задаваемой в блоке 6, ив зависимости от направления движения подъемной машины и совпадения пазов в компараторе формируется управляющий сигнал, поступающий на управляющий вход реверсивного счетчика. 2 ил. в (Л оо со 00 00
Редактор П.Гереши
Фиг. 2
Составитель В.Копылов Техред В.Кадар
Заказ 3762/18Тираж 720Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, Д
Корректор Г.Решетник
| Устройство управления проходческой подъемной установкой | 1979 |
|
SU861263A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
