ходной частоты; на фиг. А - обобщенная функциональная схема системы управления, реализующей предложенный способ.
Силовая схема трехфазного преобразователя содержит шесть полностью управля емых оентилей фаз А, Б, С, каждый из которых зашунтировлп п обратном направлении диодом. К выходным зажимам преоб разоватсля присоединены фазы ZA, ZB, Zc нагрузки, соединенно11 в звезду.
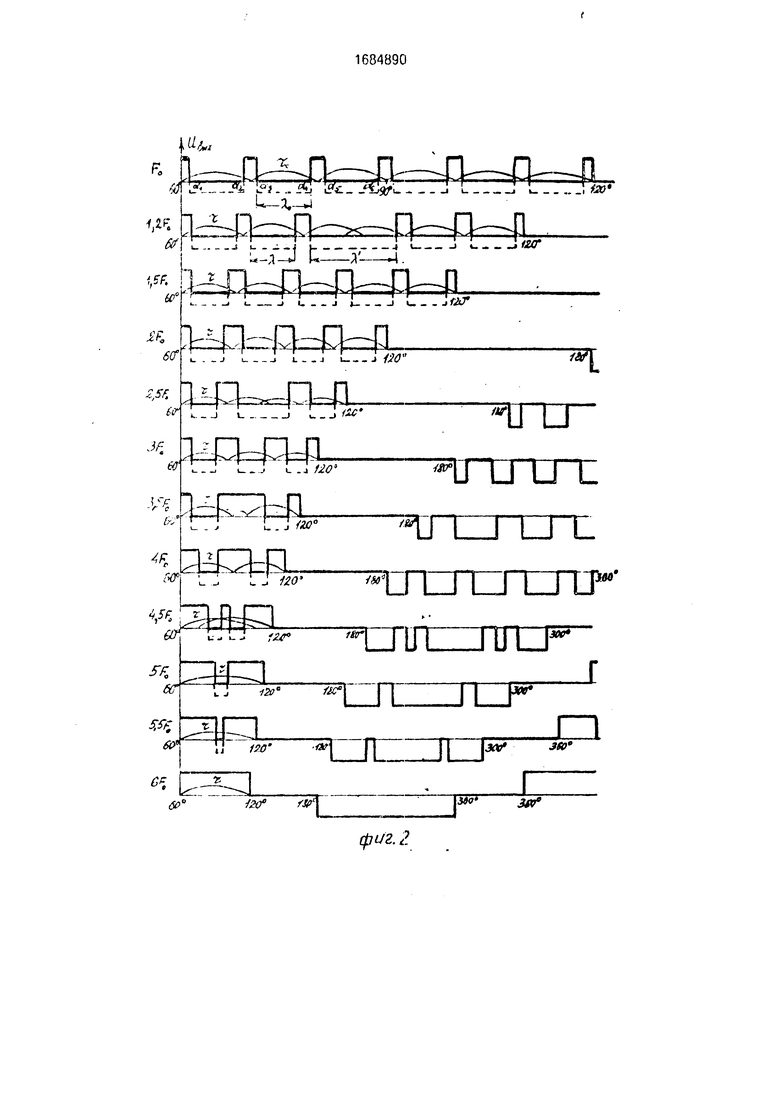
На фиг. 2 изображена кривая линия линейного пыходного напряжения преобразователя, соответствующая варианту управления с диапазоном шестикратного связанного регулирования величины и частоты выходного напряжения от Р0 до 6f:o(M-6). Пунктиром на тактовыч интервалах от (;0 до 120 эл. град, показаны управляющие импульсы, вызывающие периодическое запирание вентилей внутри отмеченной зоны проводящего состояния
Мл нлчапьной(минимальном)выходной частоте преобразователя (верхняя временная диаграмма на фиг. 2) тактовый интервал от GO до 120 эл град, разбит на G тактовых подынтерпалов, продолжительность каждого из которых в общем виде определяется
как to - 1° ЭЛ ГРЭД Внутри и посередине каждого тактового подынтервала формируются импульсы управляющих сигналов, запирающие (выключающие) соответствующие ключи, дпительность каждого из которых составля
ет
Ah
N -1
6F0N2
8,33 эл.град.
6 36 FO
Увеличение выходной частоты преоСфа- зователя сопровождается изменением продолжительности т тактовых подынтервалов, в центрах которых формируются импульсы управляющих сигналов, осуществляемым по определенным функциональным зависимостям (трем видам зависимостей), связывающим г с текущими значениями выходной частоты. Начало первого и конец последнего тактовых подынтервалов при этом синхронизированы с началом и концом соответствующего тактогого интервала. При этом обеспечивается рациональный ход изменения формы выходной кривой преобразователя при вариации частоты, за- хлючающийся в том, что на частоте, равной удвоенной начальной частоте, в полуволне кривой линейного выходного напряжения формируется на четыре выходных импульса меньше и при дальнейшем увеличении выходной частоты на частотах, кратных начальной частоте, количество выходных импульсов на полупериоде последовательно уменьшается на два на каждом шаге
Таким образом, на частоте(N-2)F0 пол- у1золнэ выходного си naici сип гезирует- ся из пяти импульсов, на частоте (N-1)F0 полуволна выходного нэпряжения формируется из трех импульсов, а на номинальной выходной частоте преобразователя МГо наблюдается одно- импульсное -т, оомирпвзние выходного тпрчжения При этом переход от одного поддиапазона регулирования к другому осуществляется безударно путем плавного изменения продолжительно- стей импульсов и пауз между импульсами на центральных участках тактовых
интервалов Одновременно для поддержания постоянства отношения величины ЕРХОДНО|О напряжения преобрязовагргя к частой- длительности сиг налои управление ею варьируют
в зависимости от текущих значений частоты и комичества формируемых сиг- t алов
В знали ч руемом варианте регулирова- 1 ия при чет НРМ M(N В) на первом поддиапазоне регулированич в зоне изменения частоты от Го до 2Г0 регулирование частоты (длительности периода) пч одного сигнала производят за счет г монения продолжительности паузы ме/f ду импульсами управ/опия, формируемой в центре тактовых 19 фадусных ингервалпп Одновременно в диапазоне Гс ,2F0 в соответствии с зависимостью
35г К Fp
6F 6 F(N
Fo
40
fiF(8Fo-2F) 12F(4 F0 - F)
изменяется продолжительность тактовых подынтервалов т, которые на фиг. 2 обозначены тонкими дуговыми линиями. Темп изменения абсолютной длительности периода
при этом выше темпа изменения длительности тактового подынтервала, в связи с чем на частоте FI продолжительность центральной паузы между импульсами управления уменьшается до нуля. Величина FI при
зтсм определяется как
. . г Г L + «D
F. - - j - - .
, г„ Ч- ) ± + - Ш ii 2NlNjt
-г N is - эLt jjfiTy jj7 77T7(Vi2 ГЗЗЮШ
где - количество импульсов сигналов управления на половине тактового интервала
Изменение длительностей А импульсов управления в диапазоне Fo, ,Fi осуществ- ляется в соответствии с зависимостью
/J
А 121 IF N FO )
/JL
36 F 6 Fo )
На следующем поддиапазоне регулирования в диапазоне выходных час- 15 тот п реобраэоаателя от FI до
F/-F,
Л -/A1
F N(4. 41 ),. f - -(2 Н )Л г
продолжительность Я всех импульсов сигналов управления, за исключением центрального, изменяется по функциональной
зависимости 6N Fo (2Т-1У
Длительность центрального на тактовом интервале импульса управления на этом поддиапазоне последовательно снижается
в соответствии с зависимостью А1 - 4F01
и на частоте
12(4 Fo -F) 180F0 Fi 1,65Fo уменьшается до нуля. В центре тактового интервала при этом формируется выходной импульс с удвоенной по сравнению с остальными импульсами длительностью. Дальнейшее повышение выходной частоты преобразователя от Fi1 до 2F0 сопровождается дальнейшим уменьшением продолжительности тактовых подынтервалов, в серединах которых формируются управляющие импульсы длительностью А
L/J1
121 F N Fo У 24 V F 6 F0 / осуществляемым таким образом, что на частоте 2FOтактовый интервал разбирается на целое число подынтервалов, равное четырем.
Далее начиная с частоты 2F0 темп ва- риации продолжительности ттактовых подынтервалов видоизменяется и осуществляется в соответствии с зависимостью
Г
Увеличение выходной частоты преобразователя выше значения Fi 3,5F0 осуществляется при формировании внутри каждой половины тактовых интервалов по одному сигналу управления (i- 1), длительность которого определяется в соответствии с соотношением А 1
6F ( N Fo pj Соответственно видо- 551 / 11 ч 1 /J1 ч
НО1ПТГО И ЧЯПМГММПГТИ ГЛХ/ЖЯИ1ИР ЛЛО N Го /1 ГО го /
изменяются и зависимости, служащие для определения граничных частот F1и F ,переходных от одного поддиапазона регулирования к другому. Так, частота F2 , на которой
и продолжается до момента достижения выходной частотой значе. || V4N (21 - 1 )( N -2i ) г чия Рз - rj- v;- FO
уменьшается до нуля пяуза между двумя центральными гигналами управления находится из соотношения
F, - r 3fU )(l «4N(N J Ч, - ,
- Г0 2-J( Ч 3 2Ц2 2 f
Следующий подэтап процесса регулирования, характеризующийся как последовательным уменьшением центрального на тактовом интервале импульса управления, так и изменением длительности остальных импульсов управления в соответствии
FO
6Г N Fo -F-J
1
- -с-ггг / г ПРИ постоянной про- oN Го ( 2i - 1 )
должительности импульсов выходной кри- ЕЮЙ преобразователя, продолжается до частоты
с соотношением
А
Fl F0 :N- lll i. )i: „i ) 3«.Fo
Полуволна линейного выходного напряжения преобразователя формируется при этом из пяти импульсов
В соответствии с приведенными выше функциональными зависимостями, связывающими протяженность тактовых подынтервалов т со значениями Г и N, на первом поддиапазоне управления по предложенному способу при F0 F 2F0 минимальная продолжительность г наблюдается N 4 2
на частоте FI
Fo OviflN ),
а при (N-1)F0 F 2Г0 на частоте F2 -у- Fo (для N 6 f2 3F0). Поэтому в
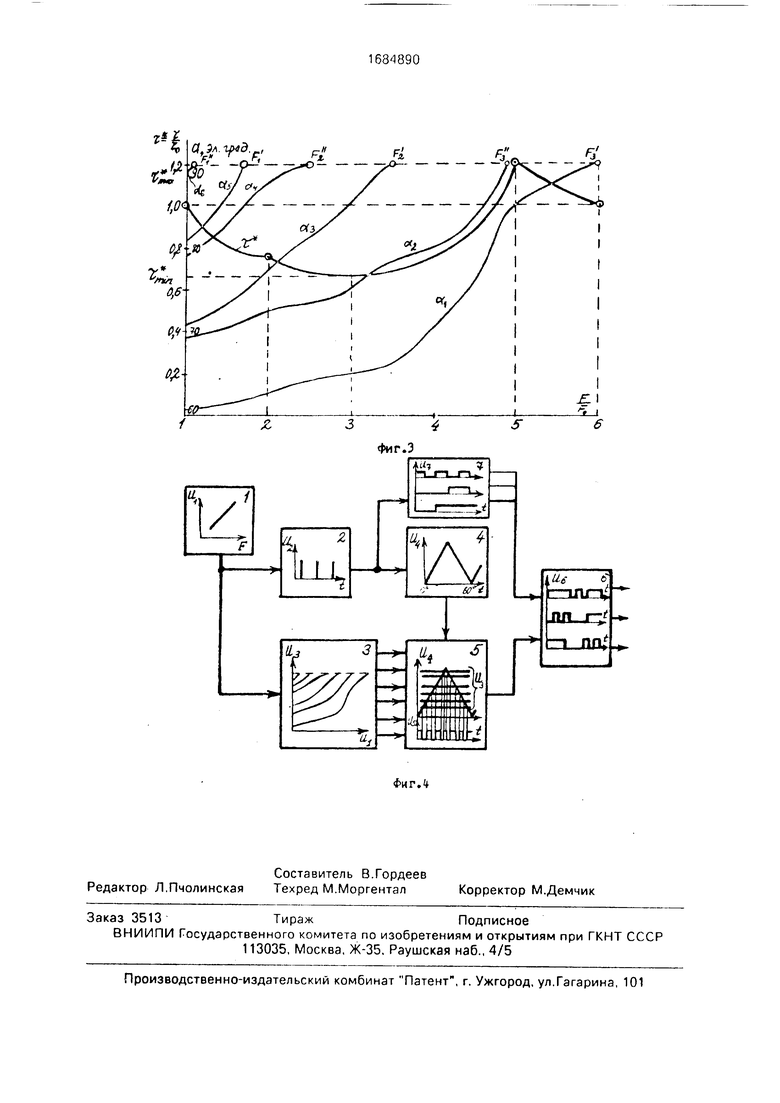
анализируемом варианте рост выходной частоты от величины, равной 3Fo, до значения (IM-1)F0 5F0 сопровождается последовательным увеличением продолжительности тактовых подынтервалов, кривая изменения относительной величины которой
т -- построена на фиг, 3. То
Увеличение выходной частоты преобразователя выше значения Fi 3,5F0 осуществляется при формировании внутри каждой половины тактовых интервалов по одному сигналу управления (i- 1), длительность которого определяется в соответствии с соотношением А 1
1 / 11 ч 1 /J1 ч
и продолжается до момента достижения выходной частотой значе. || V4N (21 - 1 )( N -2i ) г чия Рз - rj- v;- FO
/4
6 4
-- Fo 4,9 Fo . После этого и
до номинальной входной частоты прробра тгшзтеля FHOM Гз NF0 6F 0 полуполна выходного напряжения формируется из трех импульсов на полупериоде. Продолжительность т тактовых подннгервалоо, как следует из крипых, построенных на фиг. 3, увеличивается до частоты (n-1) 5F0, после чего становится равной длительности тактовых интервалов.
Продолжительность А формируемого п центре тактового интервала импульса сигнала управления на диапазоне Гз ,...,NF0 изменяется n coo1 петствии с соотношением
1
„7-- ..- инт ча- 36 о
J
OF 6 Fo Г7 6F стоте Гз - 6F0 уменьшается до нуля. Величина выходного напряжения преобразовать i достигает при этом максимального значе нич.
Обобщенная функциональная схема системы управления преобразователем, выполненная по вертикальному принципу и реализующая предлагаемый способ, пред- сгапленз на фиг. 4. На выходе блока 1 задания частоты формируется сигнал Ui, прямо пропорциональный значению выходной частоты преобразователя, который поступает на входы тактового генератора 2 и функционального fЬканзльного по выходу преобразования 3. Частота следования импульсов генератора 2 определяет частоту выходного сигнала блока 4 развертки, которая при этом в 6 раз выше выходной частоты преобразователя. Сигнал блока 4 постоянно сопоставляется в блоке Е формирования управляющих импульсов с выходными сигналами Уз функционального преобразователя 3, величина которых пропорциональна теку щим значениям положений фронтов выход ных импульсов а внутри тактовых интервалов (см. верхнюю временную диаграмму на фиг. 2). Отмеченные значения а предварительно определяются расчетным путем из соотношений, характеризующих режим осуществления предложенного способа; относительные, выраженные в эл.град., величины углов для варианта N - 6 построены на фиг. 3. В моменты равенства текущих значений сигналов бло- коиЗ и4 блоком 5 вырабатываются команды на формирование фронтов управляющих (и выходных) импульсов, которые распределяются по соотве ствующим вентилям в соответствии с принятым опорным законом 180-градусного управления при помощи логического распределителя 6 импульсов, свя- эзнного по входу с трехраэрядным регистром. Из-за существенно нелинейно-
10
20
/5
30
35
40
45
50
55
п характера р ализ/емы, i v онсмг-рностей в качестве аппаратурной огчовы рассмотренной системы упргН ченич до 1жны быть использованы цифроьне с-емы
Таким оСразом, предложенный способ управления способствует заметному улучшению качества пропусти ргмучиропчнич т ре/ФР.ЭПЫ «, ьентиььиь., преоортзоочтелеи за счет ппэв,юго бо дирного перевода от одной зоны регулирование к другой На всем диапазоне регулирования при э гом ао томатимоски обгч пг чиплртся пропорцио налыюе росту мтсго ы увеличение величины выходного напряжения преобра- чогателя а КРТИЧ и; го ИМПУЛЬСПП о попу поп не г,ыходноги напряжение соответствует значениям, рациокачьным с кики зрения обеспечения |л;0уг-мс то гя г -знического состава гпгнгпа и колигсства коммутации (гппыеи сг ювой схемы Сле- ловэтельно, предла я-мыи способ быть исполь при управлении преобрл- зовател дми, икающими системы широко / иапазон но го автоматизированного
ОЛеКТрОП| И8ОДг1, В ТОП Н1СПО |;г ЦИЗИОЧНО1О
v высоковольтного э/кчтроприпода
cl о р г у п п изобретения Способуп.ясг1сиия фззсым р гули- усмым преч брспооагелем с, N-крагным связанным pervv прогнием пглоты и величины среднего на гюлуперилде значения вы- хочного г)лпр Ы ршы, заключающийся в том, что форм.| /ют противофазные управ- лчю цис сигняпы для управления анодными ii катодными вентилями каждой ш фаз с за тонной частотой, а дня анодной и катодной групп основных вентилей разных фаз управляющие сигналы последовательно сдвигают на 60 эл. град, для каждого из основных вентилей модулиоукн управляющий сигнал на тактовых интервалах от 60 до 120эл. град., иог240доЗООэл град., причем число модулирующих импульсов на соответствующих тактовых интерпалах уменьшается с ростом выходной частоты F, причем на начальной выходной частоте F0 каждый тактовый интервал разбивают на N подынтерi алов продолжительностью Г0 .-7-.
b г0 N
отличающийся тем. что, с целью пывышения качества процесса регулирова- преобразователя, на всем диапазоне регулирования длительность тактовых подынюрвалов плавно изменяют в соответствии
К с соотношением г , при этом внутри
тактовых с модуляцией управляющих сигналов интервалов начало каждого первою и конец каждою последнего тактовых иодь нтероалов синхронизируют с началом и концом соответствующего тактового интервала, формирование каждого 1-го по направлению к центру от начала и конца тактового интервала сигнала управления осуществляют в серединах соответствующих тактовых подынтервалов при изменении выходной частоты пгэе бразователя от
.д -J д i 4- 4R
-i с м .±AB причем при
FO ДО F Fo
изменении выход ной частоты от F0 до di
Fn
C + VC +4D
- внутри каждой
i-й импульс
6F 6N Fo (21 - 1 ) сигнала управления формируют в середине каждого тактового интервала с длительностью Я1, определяемой из функциональной Д1 1 2С 1 )К. зависимости
6F
половины тактовых интервалов формируют по I импульсов сигналов унравпения с дли- тельностьЯ, определяемой и., функциональ1 1/11
ной зависимости Я (- )
а при F F каждой половине тактовых интервалов-формируют по -1 импульсов сигналов управления основными вентилями с длительностью, определяемой из соотношения К1
1
6N
f (2 - 1 Т при этом АЛЯ Г°
Fo
2)F0-2F
4i -Ll)rJ2.
2
N+4-2l)(1-2l) 2
г N(3 -4l)+2 с -2
п - N(N +2 -2I)(1 -2I) U -2
для 2F F(N Fo
1)FC
V ц
k I
N Fo A 2iN;
В N(N+2-21X1-21): C 2N(1 -i); D N(N-21X21-1); для(Ы-1)Р0 F NF0 K 1.

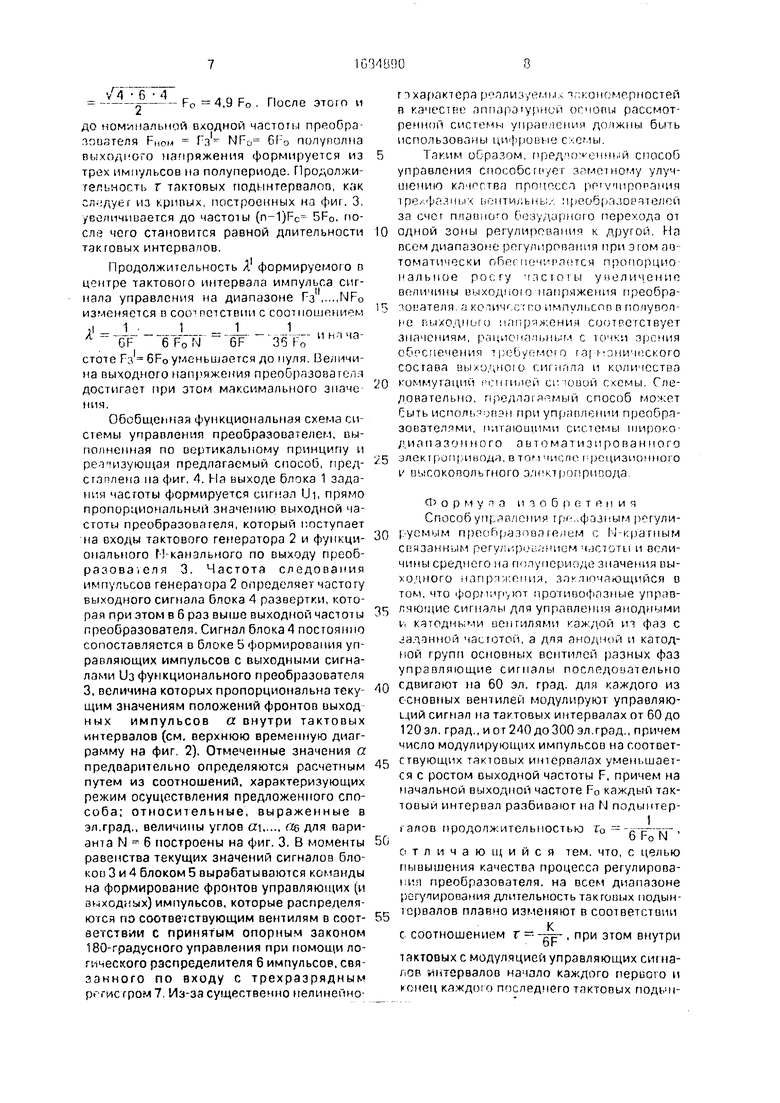
Изобретение относится к электротехнике и может быть использовано для управления преобразователями, питающими системы частотно-регулируемого электропривода. Целью изобретения является улучшение качества процесса связанного регулирования частоты и величины выходного напряжения трехфазного мостового преобразователя. Опорным законом управления преобразователя является алгоритм Изобретение относится к электротехнике и может быть использовано для управления преобразователями, питающими системы асинхронного частотно-регулируемого электропривода. Цель изобретения - улучшение качества процесса регулирования выходного сигнала трехфазного преобразователя за счет плавного безударного перехода от одного поддиапазона регулирования к другому. 180-градусного управления с дополнительными комму ациями вентилей на центральных на полупериоде тактовых интервалах 60-градусных продолжительностей. Количество импульсов на полупериоде выходной кривой при этом последовательно уменьшается при увеличении выходной частоты. Новым с способе является то, что изменение временного положения фронтов сигналов управления и импульсов кривой выходного напряжения преобразователя на всем диапазоне регулирования осуществляется безударным путем за счет соответствующей поэтапной модуляции длительностей центральных на тактовых интервалах импульсов и пауз. Диапазон регулирования при этом разбивается на поддиапазоны нижних, средних и повышенных частот, внутри каждого из которых продолжительности тактовых подынтервалов, а среди некоторых формируются сигналы управления, варьируются по гиперболическим зависимостям с соответствующими коэффициентами, характеризующими интенсивность изменения указанных продолжительное гей. 4 ил. На фиг. 1 изображена упрощенная структура силовой схемы трехфазного мостового преобразователя, выполненного на полностью управляемых вентилях; на фиг. 2 - временные диаграммы, иллюстрирующие предложенный способ управления; на фиг. 3 - кривые, показывающие изменения относительной продолжительности тактовых подынтервалов, а также фронтов выходных импульсов в процессе регулирования вы(Л С о 00 -N 00 о о
fa
7в
Г
фиг.1
Mf
/jin.n..
ПП I I .(V. 1 П П FU
Г1П-/
1
w
. Г
t--x.-t
, f1 Ьт- ч «
ffg, Г- - - -I ( I1
nb4J-HJ:: ;d;g.t:Fl:
1 Г SL1
I тг
ЛУ
fj
)l
JS S
&
°JS
Ml
& jfr
,ои rj: г 1
-Кж
oft/
D
./ -1 r
tra
ЛГ1 I1(1
0& г- г г-: f
ГИЗЧЗ
LJ - L
Ху г
p
У5 )
ЛУ
fj:V
)l
068 W91
| Устройство для управления трехфазным инвертором | 1981 |
|
SU1023625A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 3916285 | |||
| кл | |||
| Обогреваемый отработавшими газами карбюратор для двигателей внутреннего горения | 1921 |
|
SU321A1 |
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
