Изобретение относится к средствам неразрушающего контроля и предназначено для ультразвукового контроля стенки ядерного реактора изнутри при ограниченном доступе в его внутреннюю полость.
Известны устройства для контроля ядерного реактора изнутри, включающие опору, вертикальную консольную направляющую с приводом ее поворота относительно опоры и размещенный на направляющей манипулятор с диагностической головкой и приводом вертикального перемещения. Указанные устройства позволяют, сочетая перемещение диагностической головки по периметру поперечного сечения с ее перемещением по вертикали, диагностировать состояние внутренней поверхности бака реактора.
Однако использование этих устройств возможно лишь при наличии свободного доступа во внутреннюю полость реактора и сканирования контролируемой внутренней поверхности реактора при расположении вертикальной направляющей по оси реактора, т. e. при снятой крышке реактора и свободной внутренней полости реакторного бака.
Известно устройство для контроля поверхности бака ядерного реактора, включающее опору, снабженную приводом обкатки по периметру поперечного сечения реакторного бака, с закрепленной на ней вертикальной направляющей штангой с установленной на ней приводной кареткой с диагностической головкой. Устройство диагностирует поверхность реакторного бака при замкнутом круговом и дискретном по вертикали перемещениях диагностической головки. Вертикальная направляющая устройства расположена нецентрально и при обкатке диагностической головки по периметру поперечного сечения бака устройство занимает лишь периферийную зону внутренней полости бака, т.е. возможна диагностика стенок при занятой центральной части внутренней полости реактора. Однако, опора устройства, установленная на торце бака на элементах качения, прокатываясь по полному периметру торца, позволяет применять устройства лишь в тех реакторах, где торец бака свободен и позволяет указанное базирование, чем сужается область применения устройства.
Это устройство является наиболее близким по технической сущности достигаемому эффекту к предлагаемому техническому решению.
В атомной энергетике существует задача контроля стенок ядерного реактора, в котором доступ во внутреннюю полость возможен лишь через периферийные отверстия в несъемной крышке реактора, причем эти отверстия расположены по окружности большего диаметра, чем диаметр контролируемой поверхности реакторного бака.
Недостатком устройства, взятого за прототип, является невозможность выполнить контроль бака реактора при указанном ограниченном доступе в его внутреннюю полость.
Цель изобретения - обеспечение контроля стенок бака реактора при доступе во внутреннюю полость через отверстия в крышке бака, оси которых расположены вне полости контролируемой части бака.
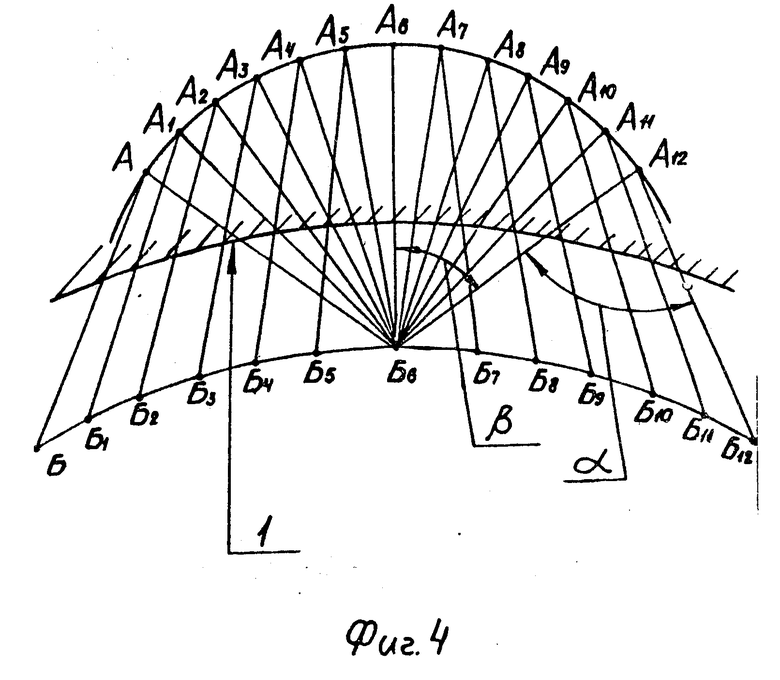
На фиг. 1 изображено устройство, введенное во внутреннюю полость бака реактора, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - продольный разрез устройства; на фиг. 4 - схема, отражающая в пределах дуги сканирования начальные и конечные положения осей шипа, нижнего звена штанги и водила.
На фиг. 4 приняты следующие обозначения: Б-Б12 - траектория нижнего звена штанги; А-А12 - траектория оси шипа; α -угол между лучами, соединяющими конечное положение оси шипа с начальным и конечным положениями оси нижнего звена; β- угол поворота водила от начального до конечного его положения.
Устройство для контроля стенки 1 бака 2 ядерного реактора изнутри включает неподвижную опору 3, предназначенную для установки на поворотном круге 4 и проходящую через одно из шести равномерно расположенных по окружности отверстий 5 в крышке 6 во внутреннюю полость 7 контролируемой части бака 2. Опора 3 состоит из двух частей - верхней 8 и нижней 9 опор, которые соединены между собой шарниром 10 и взаимно подпружинены регулируемой с помощью винта 11 пружиной 12. В опоре 3 установлена вертикальная штанга 13, состоящая из верхнего 14, среднего 15 и нижнего 16 звеньев. Верхнее звено 14 в подшипниках 17 установлено в верхней опоре 8 и кинематически связано с приводом 18 вращения по кольцевому периметру бака 2 и приводом 19 вертикального перемещения. Верхнее звено 14 связано с несоосным ему средним звеном 15 штанги 13 посредством двойного шарнира 20 и втулки 21, которая подвижно, на направляющей шпонке 22 сидит на среднем звене 15. Среднее звено 15 в подшипниках 23 установлено в нижней опоре 9 и имеет на нижнем конце водило 24, а нижнее звено 16 имеет кривошип 25, шип 26 которого в подшипниках 27 установлен в водиле 24. В нижней опоре 9 концентрично среднему звену 15 штанги 13 закреплено солнечное колесо 28, с которым находится в зацеплении сателлит 29, сидящий с возможностью вращения на закрепленной в водиле 24 оси 30. Сателлит 29 находится в зацеплении с зубчатым колесом 31, закрепленным на шипе 26. Передаточное отношение зубчатой передачи равно α / β . На нижнем звене 16 штанги 13 подвешен держатель 32 преобразователей 33. Держатель 32 состоит из платформы 24, которая установлена в конических центрах 35, закрепленных в нижнем звене 16 штанги 13. Для фиксирования транспортного положения держателя 32 имеется шариковый пружинный фиксатор 36. Корпус 37 с преобразователями 33 установлен на платформе 24 с возможностью поворота относительно двух взаимно перпендикулярных осей: вокруг оси 38 вместе с рамкой 39 и вокруг осей 40 относительно рамки 39. Таким образом, корпусу 37 с преобразователями 33 обеспечены три степени свободы, а именно, возможность поворота относительно трех взаимно перпендикулярных осей 35, 38 и 40. На корпусе 37 симметричной относительно его продольной оси закреплены два роликовых упора 41. Контролю подлежит стенка 1 бака 2.
Устройство работает следующим образом.
Включают привод 18 вращения по кольцевому периметру бака 2, при этом верхнее звено 14 штанги 13 и связанное с ним двойным шарниром 20 среднее звено 15 поворачиваются на некоторый угол β (см. фиг. 4). Водило 24, жестко связанное со средним звеном 15, также поворачивается на этот же угол β , при этом сателлит 29 обкатывается вокруг солнечного колеса 28 и посредством зубчатого колеса 31 вращает шип 27 вокруг своей оси. Таким образом, шип 27 участвует в двух движениях: вместе с водилом 24 он поворачивается вокруг оси среднего звена 15 на угол β и одновременно вращается вокруг своей оси, при этом угол поворота шипа 27 вокруг своей оси определяется передаточным отношением сателлита 29 и зубчатого колеса 31. Нижнее звено 16 штанги 13, кривошип 26 получают сложное движение, а именно, при повороте шипа 26 на этот же угол вокруг его оси поворачивается нижнее звено 16 штанги 13, а ось шипа 27 занимает последовательное множество положений, перемещаясь по дуге А1-А12. В результате ось нижнего звена 16 перемещается по дуге Б-Б12, центр которой приблизительно совпадает с центром бака 2. Угловая величина этой дуги равна  , где n = 6 - количество отверстий 5, через которые вертикальная штанга 12 введена во внутреннюю полость 7 бака 2. При движении нижнего звена 16 по дуге держатель 32 под действием пружины 12 поворачивается в конических центрах 35 до касания обоими роликовыми упорами 41 цилиндрической поверхности бака 2. Преобразователи 33 при этом устанавливаются рабочей поверхностью касательно к контролируемой поверхности бака 2. Возможность самоустановки преобразователей 33 повышена за счет развязки корпуса 37 преобразователей 33 относительно осей 38 и 40. Этой же цели служит и выполнение опоры 3 из двух составных частей - верхней опоры 8 и нижней опоры 9. Нижняя опора 9 под действием пружины поворачивается на шарнире 10, при этом штанга 13 позволяет этот поворот, несколько удлиняясь за счет перемещения подвижной втулки 21 на направляющей шпонке 22.
, где n = 6 - количество отверстий 5, через которые вертикальная штанга 12 введена во внутреннюю полость 7 бака 2. При движении нижнего звена 16 по дуге держатель 32 под действием пружины 12 поворачивается в конических центрах 35 до касания обоими роликовыми упорами 41 цилиндрической поверхности бака 2. Преобразователи 33 при этом устанавливаются рабочей поверхностью касательно к контролируемой поверхности бака 2. Возможность самоустановки преобразователей 33 повышена за счет развязки корпуса 37 преобразователей 33 относительно осей 38 и 40. Этой же цели служит и выполнение опоры 3 из двух составных частей - верхней опоры 8 и нижней опоры 9. Нижняя опора 9 под действием пружины поворачивается на шарнире 10, при этом штанга 13 позволяет этот поворот, несколько удлиняясь за счет перемещения подвижной втулки 21 на направляющей шпонке 22.
Привод 19 вертикального перемещения дискретно передвигает штангу 13 по вертикали. Таким образом, в пределах необходимой зоны контроля, преобразователи 33 выполняют сканирующее движение цилиндрической поверхности, осуществляя контроль стенки бака 2.
Предложенное устройство позволяет выполнять, например, ультразвуковой контроль стенок бака реактора при ограниченной доступности к контролируемой поверхности, а именно, при доступе во внутреннюю полость реактора через отверстия в его крышке, оси которых расположены вне полости контролируемой части бака.
Возможно использование предложенного технического решения в устройстве для зачистки стенок реактора под последующий контроль.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТОЙКА ПОВОРОТНАЯ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2001 |
|
RU2213043C2 |
| УЧЕБНЫЙ ПРИБОР ДЛЯ ДЕМОНСТРАЦИИ ПЛАНЕТАРНОЙ ЗУБЧАТОЙ ПЕРЕДАЧИ С ПОМОЩЬЮ КОДОСКОПА | 2004 |
|
RU2279716C1 |
| Установка для ультразвукового контроля вертикальных цилиндрических каналов типа корпусов ядерных реакторов | 1989 |
|
SU1682918A1 |
| МЕХАНИЗМ (ВАРИАНТЫ) | 1996 |
|
RU2121093C1 |
| Планетарная шаровая мельница | 1987 |
|
SU1636045A1 |
| УСТРОЙСТВО КОНТРОЛЯ И ИЗМЕРЕНИЯ ДЕФЕКТОВ СВАРНОГО ШВА ЦИЛИНДРИЧЕСКОЙ СТЕНКИ И СПОСОБ ПРИМЕНЕНИЯ ТАКОГО УСТРОЙСТВА | 2016 |
|
RU2717382C2 |
| ГРУЗОВАЯ ЛЕБЕДКА | 1996 |
|
RU2096309C1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2156713C1 |
| Устройство для непрерывной намотки на катушку нитеобразных материалов | 1974 |
|
SU691225A2 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2002 |
|
RU2224935C2 |


Изобретение относится к контрольно измерительной технике и предназначено для ультразвукового контроля стенки ядерного реактора. Цель изобретения - обеспечение контроля стенок бака при доступе во внутреннюю полость через отверстия в крышке бака, оси которых расположены вне полости констролируемой части бака. Штанга 3 состоит из верхнего звена 14, среднего звена 15 и нижнего звена 16, кинематически связанных между собой. Нижнее звено 16 оборудовано ультразвуковыми датчиками и описывает дугу, совпадающую с профилем исследуемой поверхности за счет обеспечения передачи водила 24, в котором установлен шип 26 кривошипа 25, соединенный водилом 24 планетарной зубчатой передачей. Солнечное колесо 28 этой передачи закреплено в опоре 3 соосно среднему звену 15 штанги 3. Сателлит 29 установлен на водиле 24 в зацеплении с зубчатым колесом 31, закрепленным на шипе 29. Выбор передаточного отношения зубчатой передачи определен углом α между лучами, лежащими в плоскости, перпендикулярной оси штанги 3, и соединяющими конечное положение оси шипа 26 с начальным и конечным положениями оси нижнего звена и eukjv β поворота водила 24 от начального до конечного его положения. Опора 3 может быть выполнена составной из шарнирно соединенных и взаимно перпендикулярных верхней части 8 и нижней части 9. 1 з.п. ф-лы, 4 ил.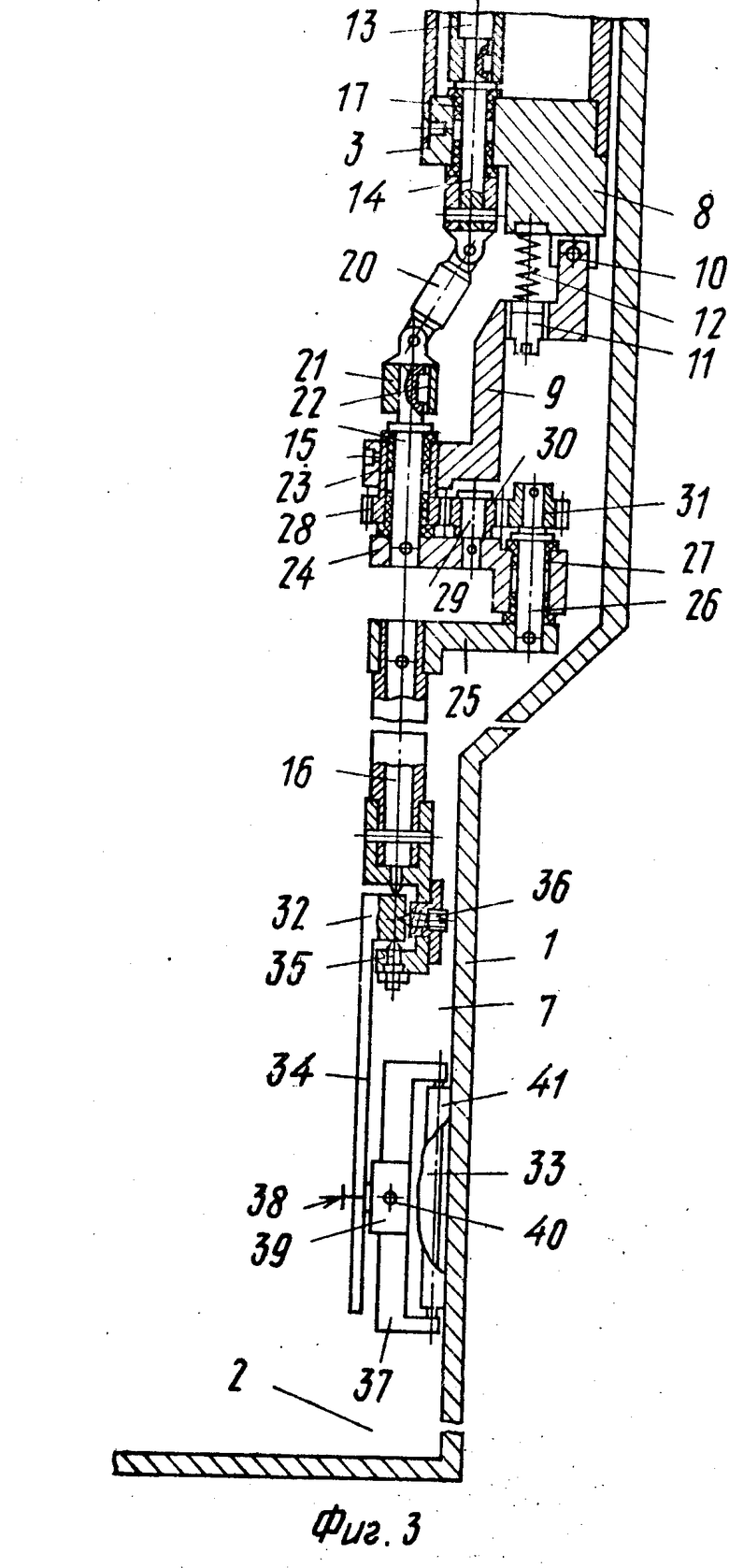
| Патент ФРГ N 3235297, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
