1
(21)4707768/28
(22)19.06.89
(46) 23.10.91. Бюл. № 39
(.71) Днепродзержинский индустриальный
институт им. Н. И. Арсеничева и Киевское
производственное объединение «Большевик
(72) С. П. Радзевич, Л. И. Бондаренко,
И. В. Винокуров, А. П. Радзевич, В. А. Палагута, Л. Р. Тисновский, В. М. Еленский
и Е. Я. Головкина
(53) 531.717.7:621.833(088.8)
(56) Авторское свидетельство СССР
№ 1527476, кл. G 01 В 5/20, 1987.
(54) СПОСОБ КОНТРОЛЯ КОСОЗУБЫХ ЦИЛИНДРИЧЕСКИХ КОЛЕС (57) Изобретение относится к машиностроению, а именно к средствам контроля зубчатых колес. Цель изобретения - расширение технологических возможностей путем определения погрешности шага контролируемого колеса. Это достигается тем, что контроль производят по двум прямолинейным образующим винтовых эвольвент- ных поверхностей, с которыми совмещают кромки шаблона, а между контрольными образующими расположено четное число прямолинейных образующих зубьев контролируемого колеса. 6 ил.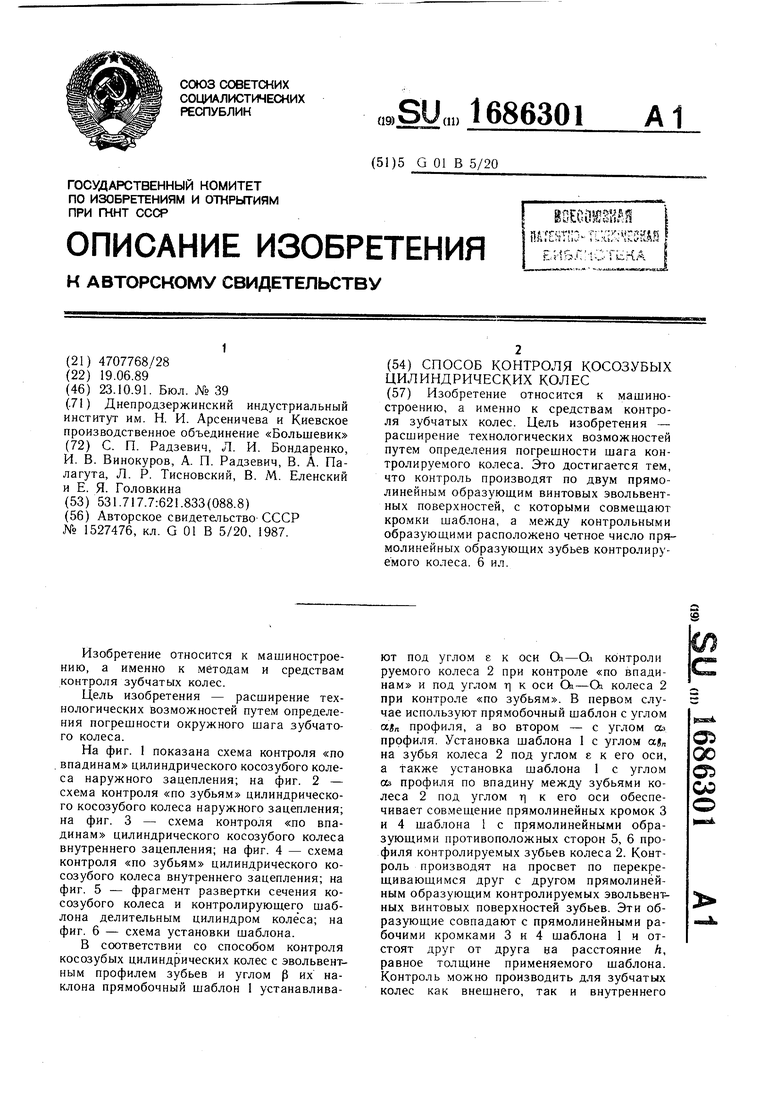
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля косозубых цилиндрических колес с эвольвентным профилем зубьев | 1987 |
|
SU1527476A1 |
| Способ контроля косозубых цилиндрических колес с эвольвентным профилем зубьев | 1986 |
|
SU1375937A1 |
| Способ контроля долбяка | 1989 |
|
SU1710231A1 |
| Способ контроля профиля эвольвентного червяка | 1980 |
|
SU996850A1 |
| Способ профилирования долбяка | 1988 |
|
SU1641535A1 |
| Косозубый долбяк | 1980 |
|
SU956187A1 |
| Способ нарезания червячных колес | 1984 |
|
SU1194611A1 |
| ЧЕРВЯЧНАЯ ФРЕЗА | 1992 |
|
RU2040376C1 |
| Дисковый обкатник | 1984 |
|
SU1276408A2 |
| Способ черновой обработки зубчатого колеса симметричным набором дисковых фрез | 1990 |
|
SU1815024A1 |
Изобретение относится к машиностроению, а именно к методам и средствам контроля зубчатых колес.
Цель изобретения - расширение технологических возможностей путем определения погрешности окружного шага зубчатого колеса.
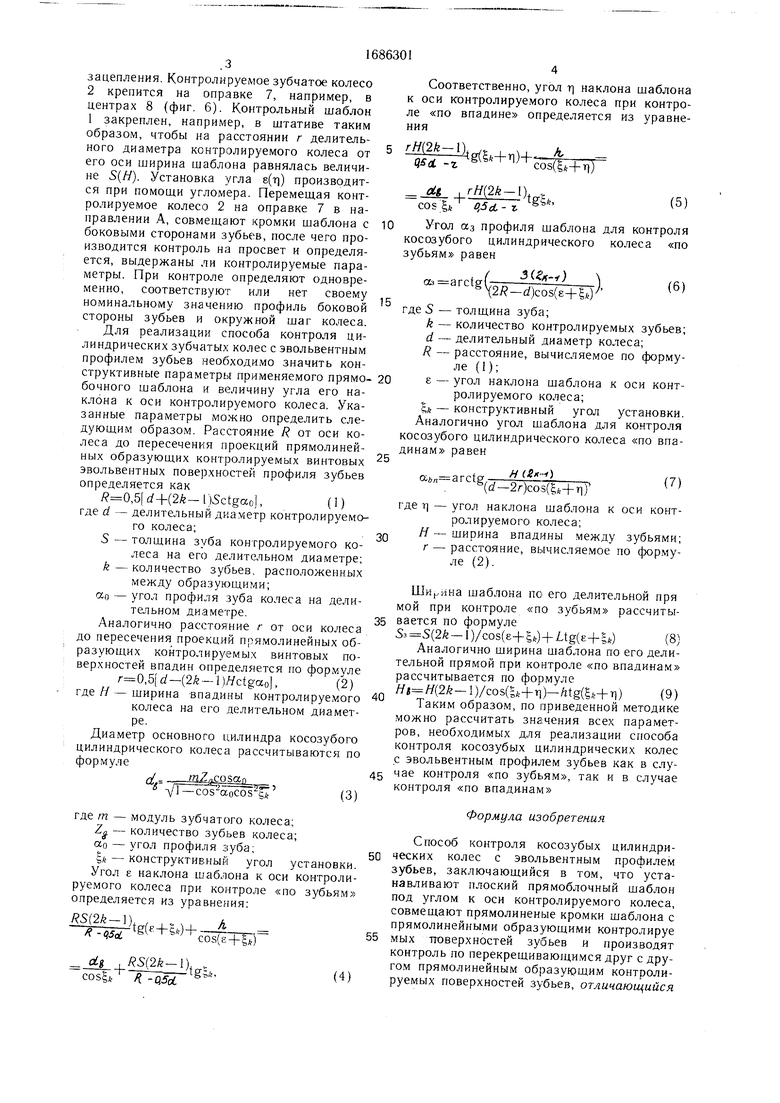
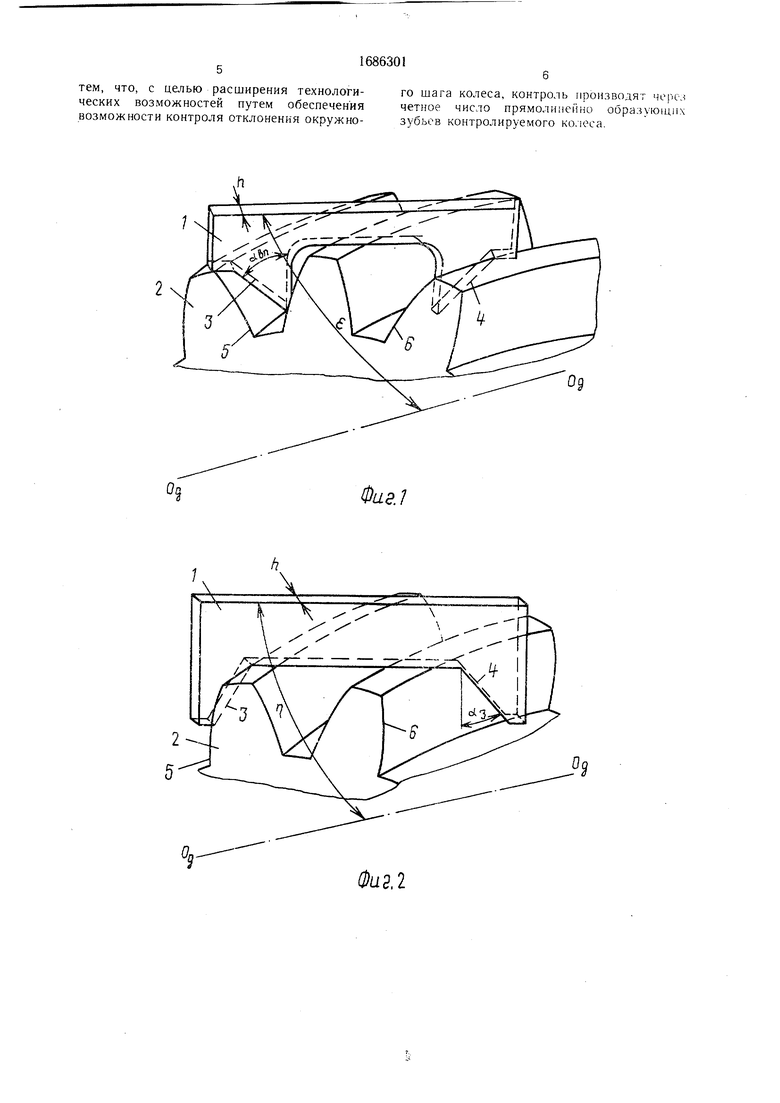
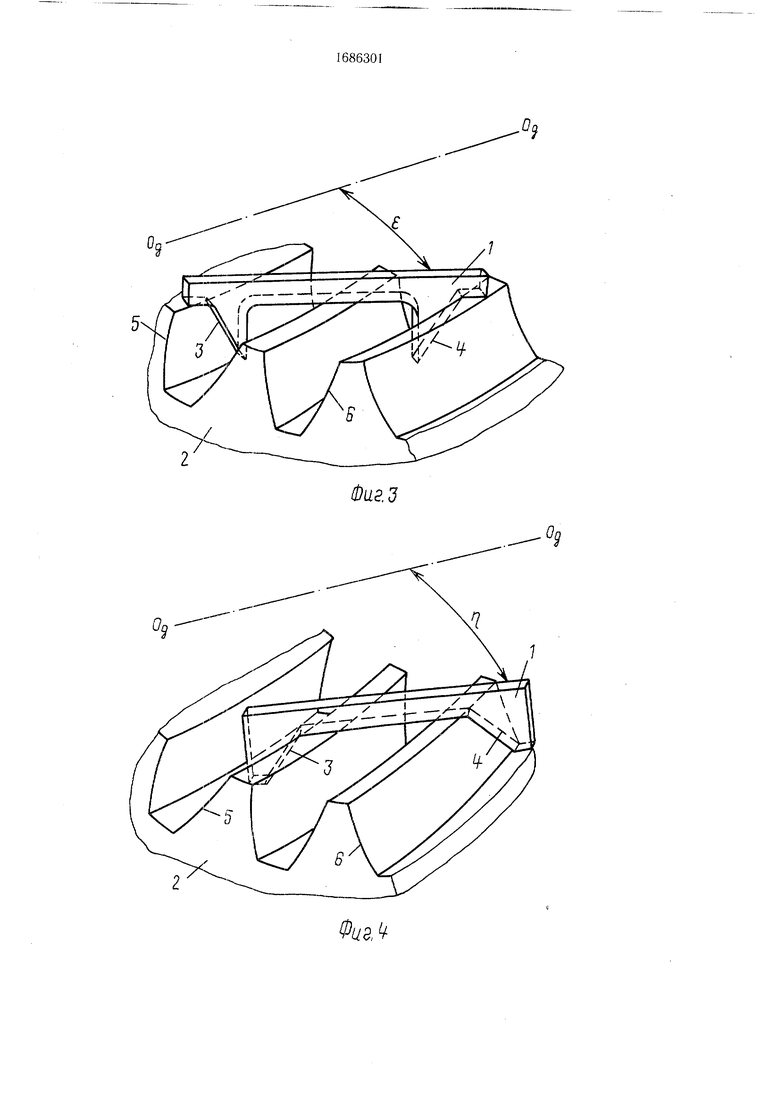
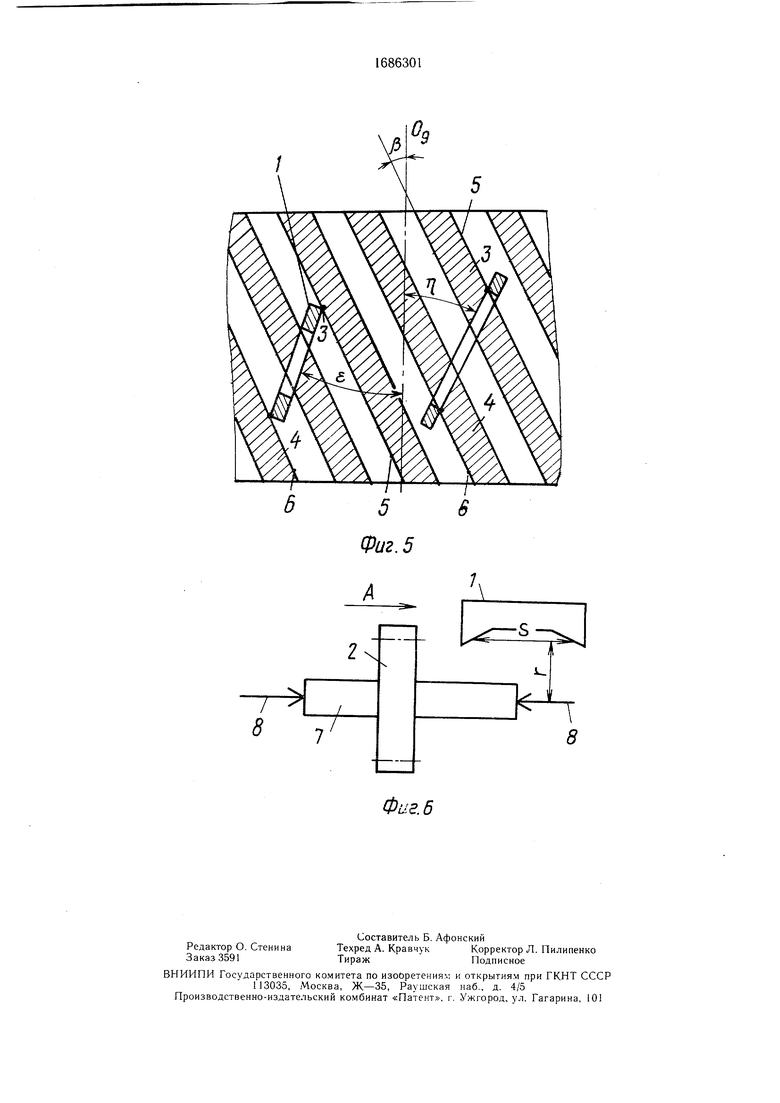
На фиг. 1 показана схема контроля «по впадинам цилиндрического косозубого колеса наружного зацепления; на фиг. 2 - схема контроля «по зубьям цилиндрического косозубого колеса наружного зацепления; на фиг. 3 - схема контроля «по впадинам цилиндрического косозубого колеса внутреннего зацепления; на фиг. 4 - схема контроля «по зубьям цилиндрического косозубого колеса внутреннего зацепления; на фиг. 5 - фрагмент развертки сечения косозубого колеса и контролирующего шаблона делительным цилиндром коле са; на фиг. 6 - схема установки шаблона.
В соответствии со способом контроля косозубых цилиндрических колес с звольвент- ным профилем зубьев и углом р их наклона прямобочный шаблон 1 устанавливают под углом е к оси Од-Од контроля руемого колеса 2 при контроле «по впадинам и под углом г к оси Од-Од колеса 2 при контроле «по зубьям. В первом случае используют прямобочный шаблон с углом a.gn профиля, а во втором - с углом оь профиля. Установка шаблона 1 с углом а«„ на зубья колеса 2 под углом е к его оси, а также установка шаблона 1 с углом оь профиля по впадину между зубьями колеса 2 под углом т к его оси обеспечивает совмещение прямолинейных кромок 3 и 4 шаблона 1 с прямолинейными образующими противоположных сторон 5, 6 профиля контролируемых зубьев колеса 2. Контроль производят на просвет по перекрещивающимся друг с другом прямолинейным образующим контролируемых эвольвент- ных винтовых поверхностей зубьев. Эти образующие совпадают с прямолинейными рабочими кромками 3 и 4 шаблона 1 и отстоят друг от друга на расстояние Л, равное толщине применяемого шаблона. Контроль можно производить для зубчатых колес как внешнего, так и внутреннего
о
00
оо
зацепления. Контролируемое зубчатое колесо 2 крепится на оправке 7, например, в центрах 8 (фиг. 6). Контрольный шаблон 1 закреплен, например, в штативе таким образом, чтобы на расстоянии г делительного диаметра контролируемого колеса от его оси ширина шаблона равнялась величине S(H). Установка угла г(г) производится при помощи угломера. Перемещая контролируемое колесо 2 на оправке 7 в направлении А, совмещают кромки шаблона с боковыми сторонами зубьев, после чего производится контроль на просвет и определяется, выдержаны ли контролируемые параметры. При контроле определяют одновременно, соответствуют или нет своему номинальному значению профиль боковой стороны зубьев и окружной шаг колеса.
Для реализации способа контроля цилиндрических зубчатых колес с эвольвентным профилем зубьев необходимо значить конструктивные параметры применяемого прямо- бочного шаблона и величину угла его наклона к оси контролируемого колеса. Указанные параметры можно определить следующим образом. Расстояние R от оси колеса до пересечения проекций прямолинейных образующих контролируемых винтовых эвольвентных поверхностей профиля зубьев определяется как
,5 rf-K2jfe-L)Sctgec,(1)
где d - делительный диаметр контролируемого колеса;
S - толщина зуба контролируемого колеса на его делительном диаметре;
k - количество зубьев, расположенных между образующими;
ао - угол профиля зуба колеса на делительном диаметре
Аналогично расстояние г от оси колеса до пересечения проекций прямолинейных образующих контролируемых винтовых поверхностей впадин определяется по формуле
,(2A-l)tfctga0,(2)
где Я-ширина впадины контролируемого колеса на его делительном диаметре.
Диаметр основного цилиндра косозубого цилиндрического колеса рассчитываются по формуле
d,УТ
,
- COS CfoCOS g
(3)
где m - модуль зубчатого колеса,
Z - количество зубьев колеса;
ао - угол профиля зуба,
k - конструктивный угол установки.
Угол е наклона шаблона к оси контролируемого колеса при контроле «по зубьям определяется из уравнения:
RS(2kК -QScL
%(е + Ы+
А
cos(e+H)
(4)
| + ) cos|. Я -Q5d
Соответственно, угол т наклона шаблона к оси контролируемого колеса при контроле «по впадине определяется из уравнения
5 rH(2k-l). QSd -т.
tg(+T)+
cosdl-pn)
0
5
0
(5)
dj , rff( cos S 0,5d, - г.
Угол аз профиля шаблона для контроля косозубого цилиндрического зубьям равен
J(
колеса «по
O3 arctg
(6)
()cos(Ј+b)
где 5 - толщина зуба;
k - количество контролируемых зубьев; d - делительный диаметр колеса; R - расстояние, вычисляемое по формуле (1);
е - угол наклона шаблона к оси контролируемого колеса;
с, - конструктивный угол установки. Аналогично угол шаблона для контроля косозубого цилиндрического колеса «по впадинам равен
И lSx-i)
a n arctg(7)
5(rf-2r)cos()
где TJ - угол наклона шаблона к оси контролируемого колеса;
Я-ширина впадины между зубьями; г - расстояние, вычисляемое по форму- ле (2).
40
шаблона по его делительной пря мой при контроле «по зубьям рассчиты35 вается по формуле
()/cos(e+|)+Јtg(e+i)(8)
Аналогично ширина шаблона по его делительной прямой при контроле «по впадинам рассчитывается по формуле ()/cos(+T)-/itg(gH-Tj)(9)
Таким образом, по приведенной методике можно рассчитать значения всех параметров, необходимых для реализации способа контроля косозубых цилиндрических колес с эвольвентным профилем зубьев как в слу45 чае контроля «по зубьям, так и в случае контроля «по впадинам
Формула изобретения
Способ контроля косозубых цилиндри- 50 ческих колес с эвольвентным профилем зубьев, заключающийся в том, что устанавливают плоский прямоблочный шаблон под углом к оси контролируемого колеса, совмещают прямолиненые кромки шаблона с прямолинейными образующими контролируе 55 мых тговерхностей зубьев и производят контроль по перекрещивающимся друг с другом прямолинейным образующим контроли- руемых поверхностей зубьев, отличающийся
1686301
56
тем, что, с целью расширения технологи-го шага колеса, контроль производя,- чек
ческих возможностей путем обеспечениячетное чисто прямолинейно обрапющпх
возможности контроля отклонения окружно-зчбьов контролируемого ко ieca
ы
Фиг.
Фиг.1
ot
Фив,
Фиг.З
