1
(21)4337897/25-28
(22)02.12.87
(46) 07.12.89. Бк1Л. № 45
(71)Днепропетровский индустриальный институт и Киевское производственное объединение полимерного машиностроения Большевик
(72)С.П.Радзевич, Л.И.Бондаренко, Л.Р.Тисновский, А.П.Радзевич, В.М.Еленский, Я.П.Ястремский,
В.А.Палатута, И.В.Винокуров и Е.Я.Головкина
(53)531.717.2:621.833 (088.8)
(56)Авторское свидетельство СССР № 1375937, кл. G 01 В 3/20, 1986,
(54)СПОСОБ КОНТРОЛЯ КОСОЗУБЫХ Щ1ГШН- ДРИЧЕСКИХ КОЛЕС С ЭВОЛЬВЕНТНЫМ ПРОФИЛЕМ ЗУБЬЕВ
(57)Изобретение относится к машиностроению и может быть использовано для контроля профиля косозубых цилиндрлческих колес с эвольвентным профилем зубьев. Целью изобретения является упрощение реализации и повышение точности способа контроля косозубых цилиндрических колес с эвольвентным профилем зубьев. Поставленная цель достигается тем, что по способу контроля косозубых цилиндрических колес с эвольвентным профилем зубьев прямо- бочный щаблон устанавливают под углем к оси контролируемого колеса и таким путем совмещают прямолинейные (рабочие) кромки шаблона с прямолинейными образующими противоположных сторон профиля контролируемых зубьев, при этом контроль производят по перекрещивающимся друг с другом прямолинейным образующим контролируемых эвольвент- ных винтовых поверхностей зубьев, отстоящих друг от друга на расстоянии, равном толщине применяемого шаблона. 2 з.п.ф-лы, 5 ил.
(Л
с: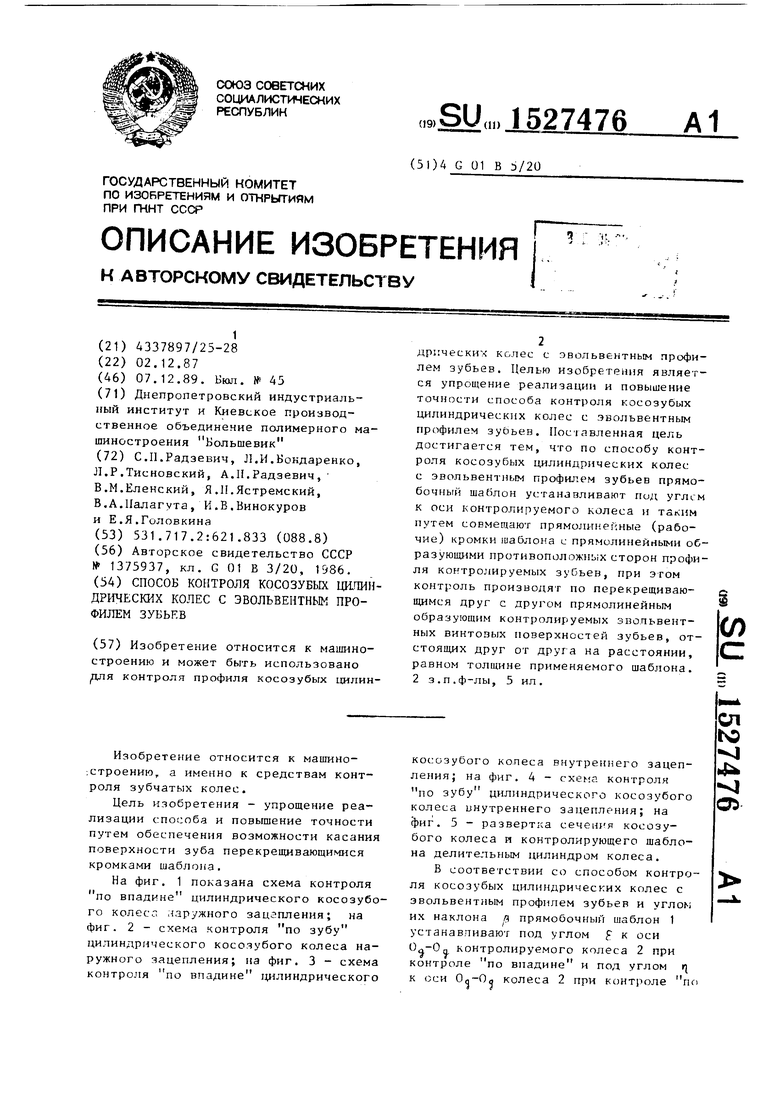
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля косозубых цилиндрических колес | 1989 |
|
SU1686301A1 |
| Способ контроля косозубых цилиндрических колес с эвольвентным профилем зубьев | 1986 |
|
SU1375937A1 |
| Способ контроля долбяка | 1989 |
|
SU1710231A1 |
| Способ контроля профиля эвольвентного червяка | 1980 |
|
SU996850A1 |
| Косозубый долбяк | 1980 |
|
SU956187A1 |
| Способ контроля сложных профилей зубьев | 1982 |
|
SU1106977A1 |
| Способ нарезания червячных колес | 1984 |
|
SU1194611A1 |
| ЧЕРВЯЧНАЯ ФРЕЗА | 1992 |
|
RU2040376C1 |
| Способ профилирования долбяка | 1988 |
|
SU1641535A1 |
| Способ черновой обработки зубчатого колеса симметричным набором дисковых фрез | 1990 |
|
SU1815024A1 |
Изобретение относится к машиностроению и может быть использовано для контроля профиля косозубых цилиндрических колес с эвольвентным профилем зубьев. Целью изобретения является упрощение реализации и повышение точности способа контроля косозубых цилиндрических колес с эвольвентным профилем зубьев. Поставленная цель достигается тем, что по способу контроля косозубых цилиндрических колес с эвольвентным профилем зубьев прямобочный шаблон устанавливают под углом к оси контролируемого колеса и таким путем совмещают прямолинейные (рабочие) кромки шаблона с прямолинейными образующими противоположных сторон профиля контролируемых зубьев, при этом контроль производят по перекрещивающимся друг с другом прямолинейным образующим контролируемых эвольвентных винтовых поверхностей зубьев, отстоящих друг от друга на расстоянии, равном толщине применяемого шаблона. 2 з.п. ф-лы, 5ил.
Изобретение относится к машино- .строению, а именно к средствам контроля зубчатых колес.
Цель изобретения - упрощение реализации способа и повышение точности путем обеспечения возможности касания поверхности зуба перекрещивающимися кромками шаблона.
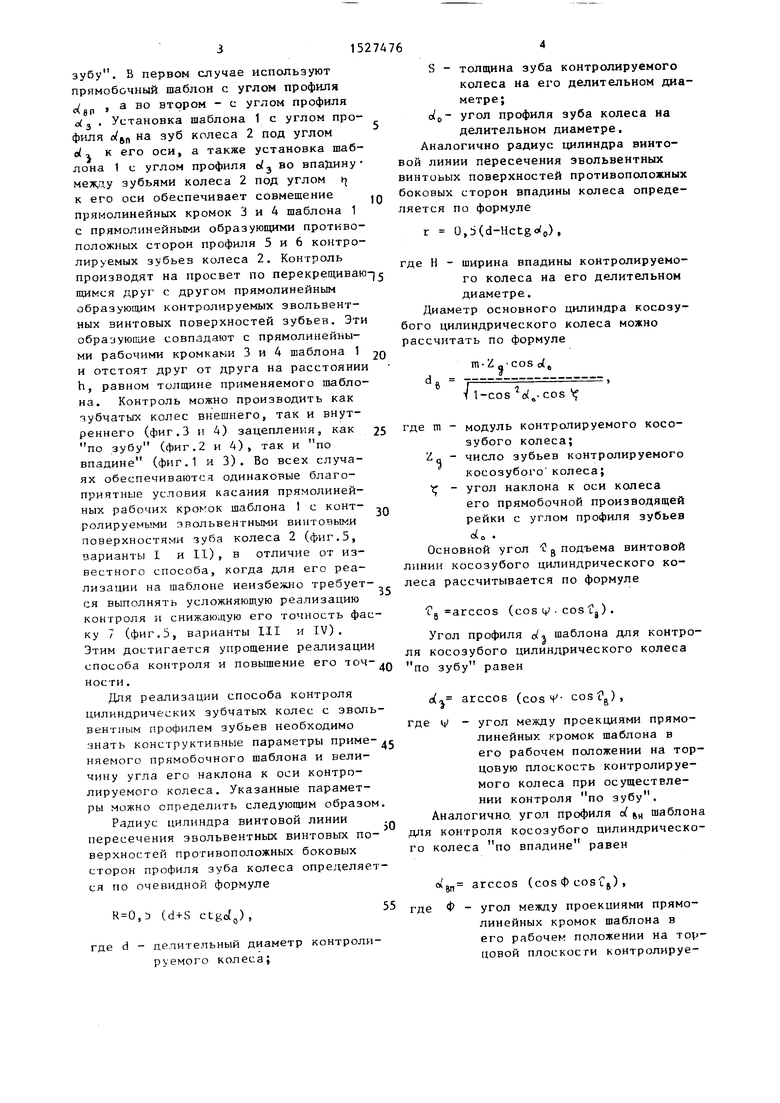
На фиг. 1 показана схема контроля по впадине цилиндрического косозубо- го колеса наружного зацапления; на фиг. 2 - схема контроля по зубу цилиндрического косозубого колеса наружного зацепления; на фиг. 3 - схема контроля по впадине цилиндрического
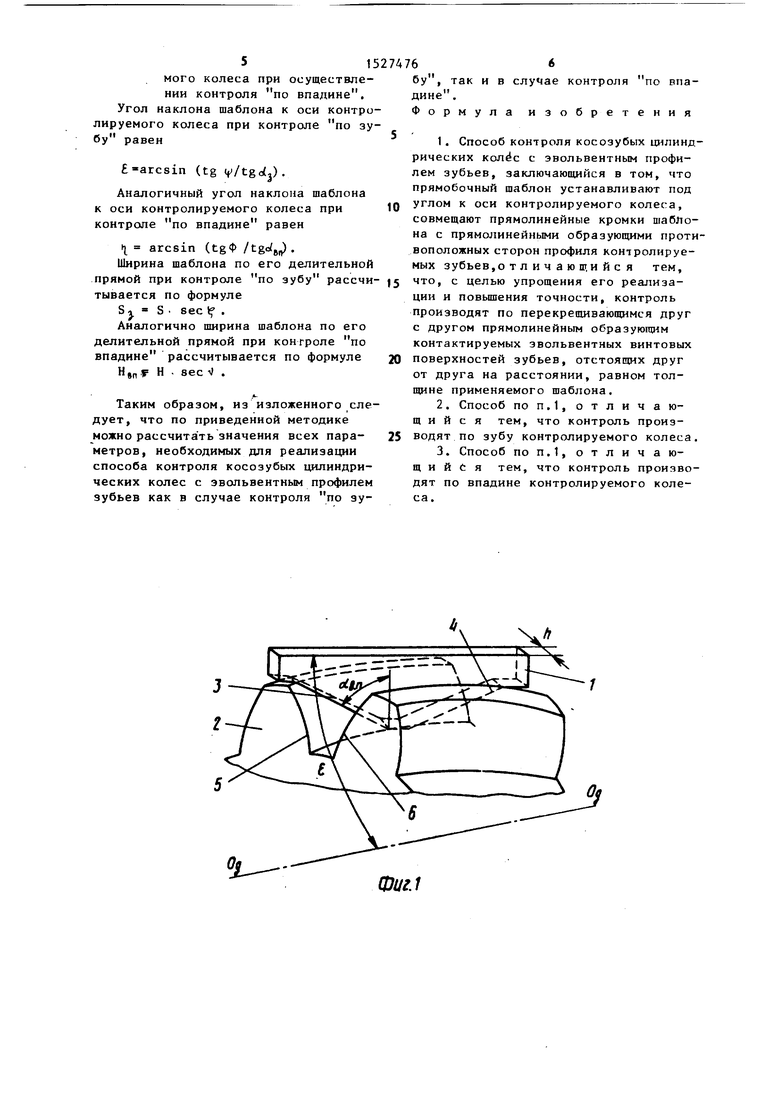
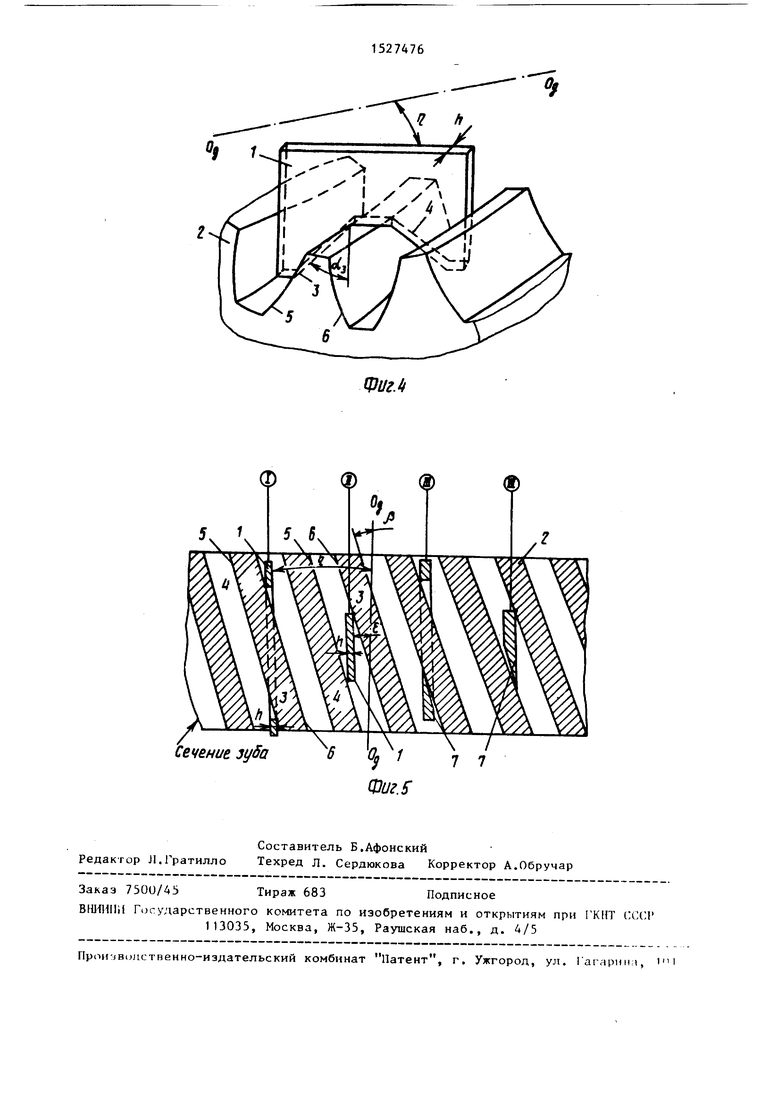
косозубого колеса внутреннего зацепления; на фиг, 4 - схема контроля по зубу цилиндрического косозубого колеса внутреннего зацепления; на фиг. 5 - развертка сечения косозубого колеса и контролирующего шаблона делительным цилиндром колеса.
В соответствии со способом контроля косозубых цилиндрических колес с звольвентным профилем зубьев и углом их наклона /Ч прямобочный шаблон 1 устанавливают под углом f к оси Од-Оп контролируемого колеса 2 при контроле по впадине и под углом 17 к оси Ofl-Oe колеса 2 при контроле по
СП ГС
ч
4
О5
зубу, в первом случае используют прямобочный шаблон с углом профиля , а во втором - с углом профиля о( 3 . Установка шаблона 1 с углом профиля в/5п на зуб колеса 2 под углом
к его оси, а также установка шаблона 1 с углом профиля d, во впадину
меж,г1,у зубьями колеса 2 под углом i к его оси обеспечивает совмещение прямолинейных кромок 3 и 4 шаблона 1 с прямолинейными образуюгчими противоположных сторон профиля 5 и 6 контролируемых зубьев колеса 2. Контроль производят на просвет по перекрещиваю щимся друг с другом прямолинейным образующим контролируемых эвольвент- ных винтовых поверхностей зубьев. Эти образуюпще совпадают с прямолинейными рабочими кромками 3 и 4 шаблона 1 и отстоят друг от друга на расстоянии h, равном толщине применяемого шаблона. Контроль можно производить как зубчатых колес внешнего, так и внутреннего (фиг.З и 4) зацепления, как по зубу (фиг.2 и 4), так и по впадине (фиг.1 и 3). Во всех случаях обеспечиваются одинаковые благоприятные условия касания прямолинейных рабочих кромок шаблона t с контролируемыми эвольвентными винтовыми поверхностями зуба колеса 2 (фиг.З, варианты 1 и II), в отличие от известного способа, когда для его реализации на шаблоне неизбежно требуется выполнять усложняющую реализацию контроля и снижающую его точность фаску 7 (фиг.З, варианты III и IV). Этим достигается упрощение реализации способа контроля и повышение его точности .
Для реализации способа контроля цилиндрических зубчатых колес с эволь вентпым профилем зубьев необходимо знать конструктивные параметры приме- няемого прямобочного шаблона и величину угла его наклона к оси контролируемого колеса. Указанные параметры можно определить следующим образом
Радиус цилиндра винтовой линии пересечения эвольвентных винтовых поверхностей противоположных боковых сторон профиля зуба колеса определяется по очевидной формуле
,i (d + S ctgo(),
где d - целительный диаметр контролируемого колеса;
0
0
S - толщина зуба контролируемого колеса на его делительном диаметре;о(о- угол профиля зуба колеса на
делительном диаметре. Аналогично радиус цилиндра винтовой линии пересечения эвольвентных винтоьых поверхностей противоположных боковых сторон впадины колеса определяется по формуле
г 0,b(d-Hctgo o),
где Н - ширина впадины контролируемого колеса на его делительном диаметре.
Диаметр основного цилиндра косозубого цилиндрического колеса можно рассчитать по формуле
m-Z o cos о(, 1 1-COS о(,. cos
Ь где ш - модуль контролируемого косо- зубого колеса;
число зубьев контролируемого косозубого колеса; угол наклона к оси колеса его прямобочной производящей рейки с углом профиля зубьев
Х о .
Основной угол g подьема винтовой линии косозубого цилиндрического колеса рассчитывается по формуле
arccos (cos V cos Dg) .
Угол профиля 0/5 шаблона для контроля косозубого цилиндрического колеса по зубу равен
а( arccos (cos V- cos),
где IV - угол между проекциями прямолинейных кромок шаблона в его рабочем положении на торцовую плоскость контролируемого колеса при осуществлении контроля по зубу. Аналогично, угол профиля а шаблона для контроля косозубого цилиндрического колеса по впадине равен
arccos (cos Ф coslTj) ,
где Ф - угол между проекциями прямолинейных кромок шаблона в его рабочем положении на тор- 1ОВОЙ плоскости контролируемого колеса при осуществлении контроля по впадине. Угол наклона шаблона к оси контролируемого колеса при контроле по зубу равен
arcsin (tg v/tga(j). Аналогичный угол наклона шаблона
к оси контролируемого колеса при контроле по впадине равен
arcsin ( /tgofg.
Ширина шаблона по его делительной прямой при контроле по зубу рассчи- тывается по формуле
Sj S . sec .
Аналогично ширина шаблона по его делительной прямой при конгроле по впадине рассчитывается по формуле
H,n,f Н . sec V .
Таким образом, из изложенного следует, что по приведенной методике можно рассчитать значения всех пара- метров, необходимых для реализации способа контроля косозубых цилиндрических колес с эвольвентным профилем зубьев как в случае контроля по зубу, так и в случае контроля по впадине . Формула изобретения
с другом прямолинейным образующим контактируемых звольвентных винтовых поверхностей зубьев, отстоящих друг от друга на расстоянии, равном толщине применяемого шаблона.
фцг.1
Фиг.з
Сечвние. зу5а
Фиг.
