Изобретение относится к испытаниям двигателей внутреннего сгорания и может быть использовано для испытаний двигателей на машиностроительных предприятиях, выпускающих мотопилы.
Целью изобретения является повышение точности и упрощение определения проекций вынуждающих сил и моментов двигателя.
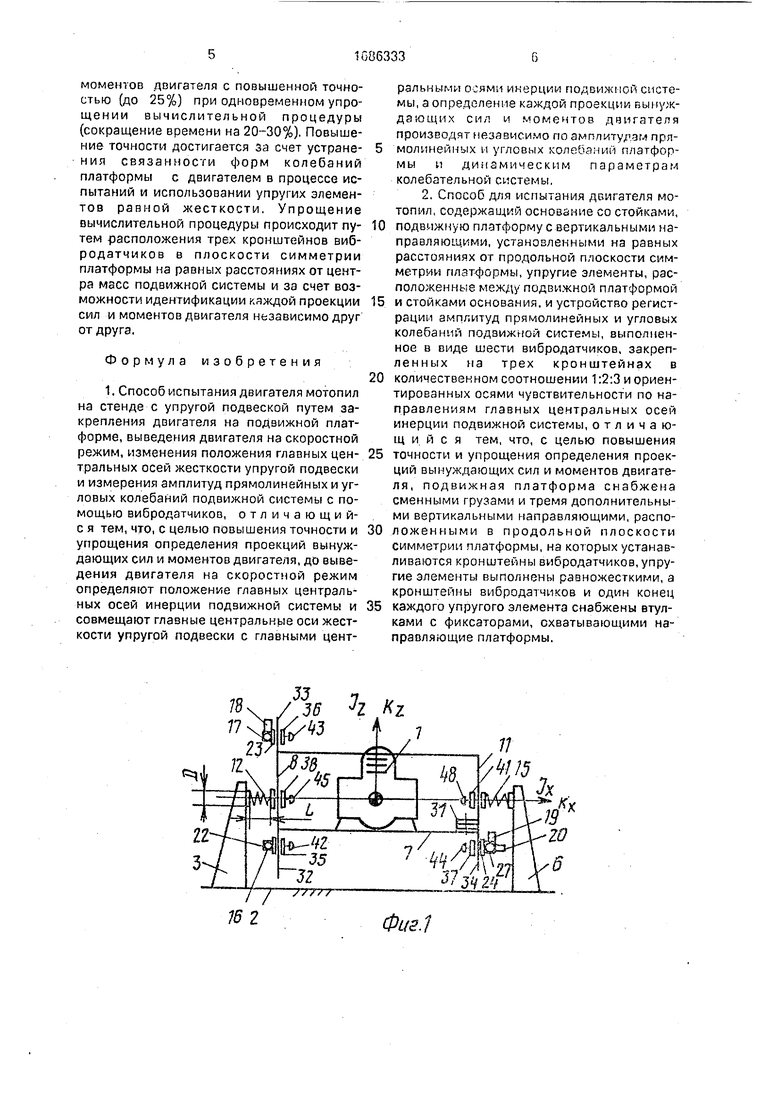
На фиг. 1 изображен стенд для испытания двигателя мотопил, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, вид сверху; на фиг. 4 - схема расположения вибродатчиков на платформе.
Стенд для испытаний двигателя 1 мотопил включает основание 2 со стойками 3-6, подвижную платформу 7 с вертикальными направляющими 8-11, установленными на равных расстояниях у от продольной плоскости симметрии платформы lx, Iz- упругие элементы 12-15, расположенные между подвижной платформой 7 и стойками 3-6 основания.
Устройство регистрации амплитуд прямолинейных и угловых колебаний подвижной системы выполнено в виде шести вибродатчиков 16-21, закрепленных на т рех кронштейнах 22-24 в количественном соотношении 1:2:3 и ориентированных осями
о
00
ON СлЗ СО СА)
25-30 чувствительчосш по направлениям главных центральных осей инерции (ГЦОИ) подвижной системы lx fy, iz (см. фиг. 4). Подвижная платформа 7 снабжена сменными грузами 31 и тремя дополнительными вер- тикальными направляющими 32-34, расположенными в продольной плоскости симметрии платформы lx, IK, на которых устанавливаются кронштейны 22-24 вибродатчиков. Упругие элементы 12-14 выполняются равножеиткими, например, в виде цилиндрических винтовых пружин, установленных без натяга с отношением длины рабочих частей L к среднему диаметру D, равным 1,45-1,55. Кронштейны 22-24 виб- родатчикоо и один конец каждого упругого элемента 12-15 снабжены втулками 35-41 с фиксаторами 42-48, охватывающими направляющие 8-1 1 и 32-34 платформы 7. Для удобства эксплуатации втулки 38-41 выполняются разъемными (разъемы на чертежах не показаны).
Испытание двигателя осуществляется следующим образом,
Испытываемый двигатель 1 закрепляется на подвижной платформе 7. Определяется положение ГЦОИ подвижной системы (двигателя 1 и платформы 7 с направляющими 8-11, 32-34). При помощи сменных грузов 31 изменяют положение ГЦОИ так, чтобы две из них lx, ly совместились с горизонтальной плоскостью, параллельной платформе 7, Устанавливают кронштейны 22-24 с втулками 35-37 и вибродатчиками 16-21 на направляющие 32-34 так, чтобы датчики располагались на равных расстояниях z от оси 1Х и равных расстояниях х от оси IZ(CM. фиг, 4), и закрепляют втулки 35-37 на направляющих 32-34 при помощи фиксаторов 42-44, Платформу 7 с двигателем 1 и вибродатчиками Кг-21 устанавливают во втулках 38-41 (они выполняются разъемными) так, чюбы атулки охватывали направляющие 8- 1I. Перемещая платформу 7 относительно втулок 38- 41 и упругих элементов 12-15,производят совмещение ГЦОИ подвижной системы 1Х, ly, Iz с. ПДОЖ упругих элементов 12-15 и , Ку, К2 и закрепляют платформу 7 на напраЕ5ляющих 8-11 при помощи фиксаторов 45-48.
Запускают двигатель 1 и выводят его на скоростной режим с заданной частотой вращения коленчатого валп, ВиОродатчики 16- 21 подключают к аи1эроизмерительной
аппаратуре и по показаниям вибродатчиков определяют амплитуды прямолинейных и угловых колебаний подвижной системы по соотношениям (см, фиг. 4)
я -я - Z(a 2-az3) ахо - Зхз2 х
Эио -
аУз+аУ1 уо2
Эгз + 3z2
2
azo
а/У
ayi ау2 2z
Эг2 Эгз
2х ауз ау1
2х
где аУ1Эгз - показания датчиков виброперемещения в направлении осей у, 1Х, I.; х, z - координаты точек закрепления датчиков.
При равной жесткости упругих элементов 12-15 каждую проекцию главного вектора Fx, Fy, Fz и главного момента Мх, Му, вынуждающих сил двигателя определяют независимопоамплитудам
Зх0 . %о . az0 . &. Р. У колебаний подвижной системы и динамическим параметрам подвески по следующим соотношением Fx aXoA;Mx a-4Ky(1--t42)2+4d4W ;
Fy ауо А; My уЗ 4 К xi 2 ( 1 )2+4а-52г 2 ; F7 aZoA;Mz y4K(y2 + + х12)()2 +
+ 4 de 2 г 2
1/2
где К, h - коэффициенты жесткости и сопротивления каждого упругого элемента 12-15;
A 4K(1- U2)2+4dV ; v - гп 0, 0
1х,- в
4К
de el/ + ds;
где xi, 1У1, Izi - моменты инерции подвижной системы вокруг осей lx, ly, Iz;
m - масса подвижкой системы;
xiyi - координаты расположения упругих элементов 12-15.
Предлагаемый способ, осуществленный на описанном стенде, позволяет провести идентификацию пространственного силового воздействия двигателя мотопил путем определения проекций вынуждающих сил и
моментов двигателя с повышенной точностью (до 25%) при одновременном упрощении вычислительной процедуры (сокращение времени на 20-30%). Повышение точности достигается за счет устранения связанности форм колебаний платформы с двигателем в процессе испытаний и использовании упругих элементов равной жесткости. Упрощение вычислительной процедуры происходит путем расположения трех кронштейнов вибродатчиков в плоскости симметрии платформы на равных расстояниях от центра масс подвижной системы и за счет возможности идентификации каждой проекции сил и моментов двигателя независимо друг от друга.
Формула изобретения
1. Способ испытания двигателя мотопил на стенде с упругой подвеской путем закрепления двигателя на подвижной платформе, выведения двигателя на скоростной режим, изменения положения главных центральных осей жесткости упругой подвески и измерения амплитуд прямолинейных и угловых колебаний подвижной системы с помощью вибродатчиков, отличающий- с я тем, что, с целью повышения точности и упрощения определения проекций вынуждающих сил и моментов двигателя, до выведения двигателя на скоростной режим определяют положение главных центральных осей инерции подвижной системы и совмещают главные центральные оси жесткости упругой подвески с главными центральными о:ямн инерции подвижной системы, а определение каждой проекции вынуждающих сил и моментов двигателя производят независимо по амплитудам прл- молинейных и угловых колебании платформы и динамическим параметрам колебательной системы.
2. Способ для испытания двигателя мотопил, содержащий основание со стойками,
подвижную платформу с вертикальными направляющими, установленными на равных расстояниях от продольной плоскости симметрии платформы, упругие элементы, расположенные между подвижной платформой
и стойками основания, и устройство регистрации амплитуд прямолинейных и угловых колебаний подвижной системы, выполненное в виде шести вибродатчиков, закрепленных на трех кронштейнах в
количественном соотношении 1:2:3 и ориентированных осями чувствительности по направлениям главных центральных осей инерции подвижной системы, отличающийся тем, что, с целью повышения
точности и упрощения определения проекций вынуждающих сил и моментов двигателя, подвижная платформа снабжена сменными грузами и тремя дополнительными вертикальными направляющими, расположенными в продольной плоскости симметрии платформы, на которых устанавливаются кронштейны вибродатчиков, упругие элементы выполнены равножесгкими, а кронштейны вибродатчиков и один конец
каждого упругого элемента снабжены втулками с фиксаторами, схватывающими направляющие платформы.

| название | год | авторы | номер документа |
|---|---|---|---|
| Учебная установка для изучения пространственных колебаний упруго подвешенного тела | 1989 |
|
SU1654859A1 |
| Стенд для испытания мембранного карбюратора | 1989 |
|
SU1590615A1 |
| Кресло для вибротерапии | 1978 |
|
SU1114419A1 |
| Способ балансировки роторов | 1984 |
|
SU1221518A1 |
| Переносная моторная пила | 1981 |
|
SU939188A1 |
| Переносная моторная пила | 1978 |
|
SU686869A2 |
| Переносная моторная пила | 1980 |
|
SU939187A1 |
| Стенд для испытания топливного насоса | 1975 |
|
SU553351A1 |
| Стенд для испытания пильных аппаратов | 1986 |
|
SU1455267A1 |
| Способ балансировки роторов | 1984 |
|
SU1227959A1 |

Изобретение может найти применение при испытаниях двигателей на машиностроительных предприятиях, выпускающих мотопилы. Целью изобретения является повышение точности и упрощение определения проекций вынуждающих сил и моментов двигателя. Для этого двигатель устанавливают на подвижной- платформе, прикрепленной при помощи упругих элементов к неподвижному основанию, определяют положение главных центральных осей с главными центральными осями жесткости подвески, выводят двигатель на скоростной режим и определяют каждую проекцию вынуждающих сил и моментов двигателя независимо по амплитудам прямолинейных и угловых колебаний и динамическим параметрам колебательной системы. Стенд для осуществления способа испытания двигателя мотопил вкпючает основание, подвижную платформу с направляющими, равножесткие упругие элементы, выполненные в виде пружин, шесть вибродатчиков, прикрепленных на трех кронштейнах к платформе в ее продольной плоскости симметрии в соответствии 1:2:3, причем кронштейны вибродатчиков и один конец каждого упругого элемента снабжены втулками с фиксаторами, охватывающими направляющие и платформы. 2 с.п. ф-лы, 4 ил, сл С
7/
Фиг.1
Фив. г
Ь П 3 /75/ ЫЮ1Ч S
I I
3 П В 5 ЗУ К-У гв 11 IS 6
Фие.Ъ
11 IS 6
| Стенд для испытания мотопил | 1988 |
|
SU1546258A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
