Изобретение относится к весоизмерительной технике, в частности к устройствам для взвешивания объектов в движении, например животных.
Цель изобретения - повышение точности измерения, оптимизация длины платформы.
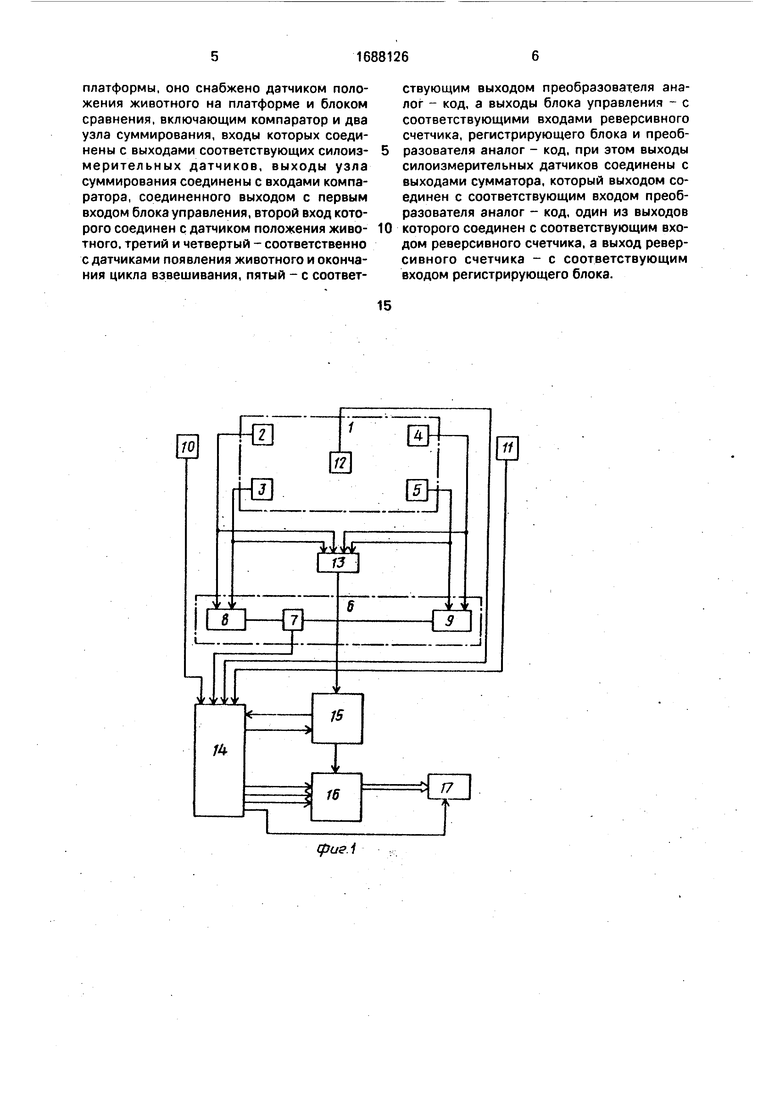
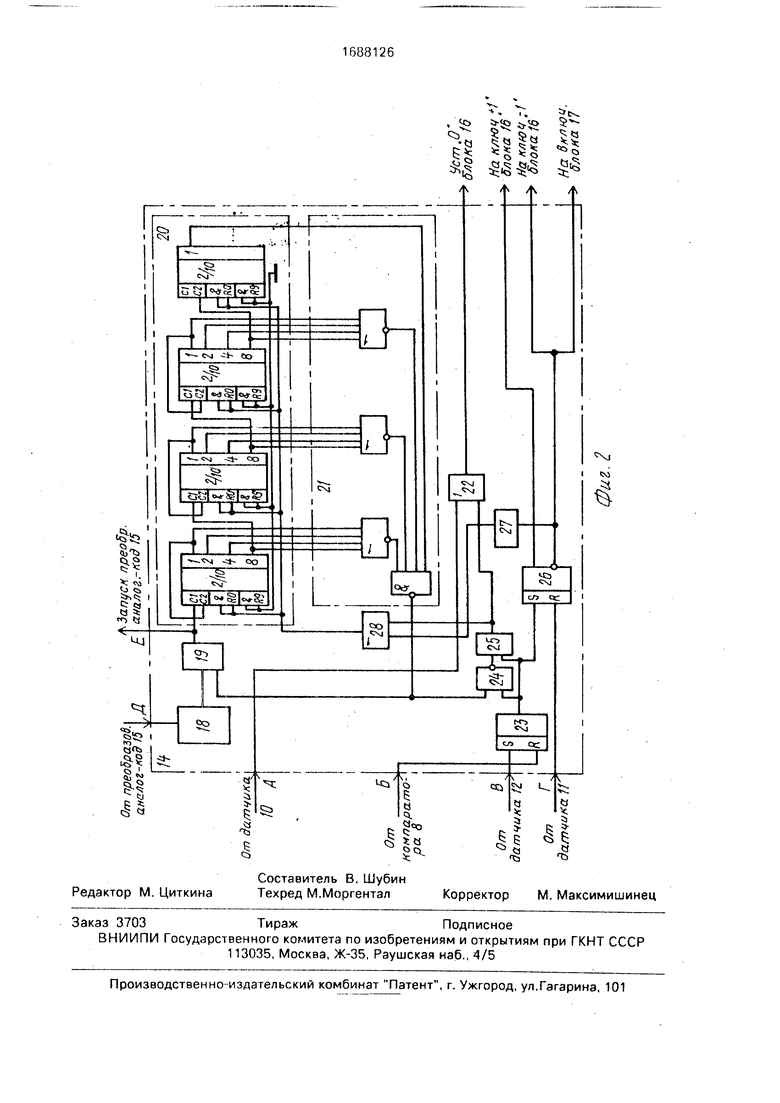
На фиг. 1 представлена блок-схема устройства для измерения массы животного в движении; на фиг. 2 - пример построения блока управления.
Устройство (фиг. 1) содержит весоизмерительную платформу 1 со встроенными си- лоизмерительными датчиками 2-5, блок 6 сравнения, состоящий из компаратора 7 и двух узлов 8 и 9 суммирования, датчик 10 появления животного, датчик 11 окончания цикла измерения, датчик 12 положения животного на платформе, сумматор 13 полной
массы, блок 14 управления, преобразователь 15 аналог - код, реверсивный счетчик 16 и регистрирующий блок 17.
Блок 14 управления (фиг. 2) содержит делитель 18 частоты, элемент И 19, счетчик 20 импульсов, блок 21 контроля числа импульсов, элемент ИЛИ 22, триггер 23, элемент И-НЕ 24, элемент И 25, триггер 26, одновибратор 27.
Выходы весоизмерительной платформы 1 с силоизмерительными датчиками 2, 3 соединены с входами узла 8 суммирования, а выходы датчиков 4, 5 соединены с входами узла 9 суммирования, одновременно выходы датчиков 2-5 соединены с входами сумматора 13 полной массой, выход которого соединен с первым входом преобразователя 15 аналог - код. второй вход которого соединен с блоком 14 управления. Выходы
О 00
со
N) О
узлов 8, 9 суммирования соединены с выходами компаратора 7, выход которого соединен С первым входом блока 14 управления,второй, третий и четвертый выходы которого соединены с соответствующими входами реверсивного счетчика 16, четвертый вход которого соединен с первым выходом преобразователя 15 аналог- код. Выход датчика 10 появления животного соединен с вторым входом блока 14 управления, третий вход которого соединен с выходом датчика 11 окончания цикла измерения, его четвертый вход соединен с выходом датчика 12 положения животного, а пятый вход блока 14 управления соединен с вторым выходом преобразователя 15 аналог - код, шестой выход блока 14 управления соединен с первым входом регистрирующего блока 17, информационные входы ко горого соединены с соответствующими выходами реверсивного счетчика 16. Вход блока управления через делитель 18 частоты соединен с первым входом элемента И 19, второй вход которого соединен с выходом блока 21 контроля, а выход с входом счетчика 20 импульсов, выходы которого соединены с соответствующими входами блока 21 контроля. Второй вход блока 14 управления соединен с первым входом элемента ИЛИ-22, второй вход которого соединен с выходом элемента И 25 и первым входом элемента ИЛИ 28, выход которого соединен с входом Сброс счетчика 20. Третий вход блока управления соединен с первым входом триггера 26. выход которого через одновибратор 27 соединен с вторым входом элемента ИЛИ 28. Четвертый вход блока управления через триггер 23 соединен с вторыми входом элемента 24, первым вхсГдом элемента 25 и вторым вхо- дом триггера 26, пятый вход блока управления соединен с вторым входом триггера 23, а выход элемента И-НЕ 24 соединен с вторым входом элемента И-25,
Устройство работает следующим образом.
При входе животного в зону действия датчика 10 появления животного последний выдает сигнал в блок 14 управления, который подготавливает реверсивный счетчик 16 к приему информации.
Животное перемещается на платформу 1. При достижении зоны действия датчика 12 положения животного на платформе датчик 12 срабатывает и выдает сигнал в блок 14 управления, который производит включение счетчика 16 в прямом коде и преобразователя 15 аналог - код, преобразующего сигнал, воспринимаемый силоизмеритель- ными датчиками 2-5 через сумматор 13 полной массы. Цикл измерения повторяется
блоком 14 управления, например, 10 раз, а результаты измерений накапливаются в реверсивном счетчике 16,
По окончании последнего такта измерения и при отсутствии сигнала от блока 6 сравнения, свидетельствующего, что животное не достигло оптимальной зоны взвешивания, блок 14 управления сбрасывает информацию, содержащуюся в реверсив0 ном счетчике, в нуль и процесс измерения повторяется.
Продвигаясь по платформе 1, животное сначала больше нагружает силоизмеритель- ные датчики 2 и 3 и меньше - силоизмери5 тельные датчики 4 и 5, затем оно достигает середины платформы, и наступает момент, когда есть сигнал на выходах, подключенных попарно к соответствующим узлам 8 и 9 суммирования силоизмерительных датчи0 ков 2, 3, 4 и 5 и попарно расположенных в начале и конце платформы, Это свидетельствует о том, что центр массы животного находится на середине платформы, т.е. в оптимальной для измерения зоне.
5 При равенстве сигналов на выходе узлов 8 и 9 суммирования срабатывает компаратор 7 и включает блок 14 управления, который после проведения установленного цикла измерений прекращает работу преоб0 разователя 15 аналог -- код и оставляет информацию на выходе реверсивного счетчика 16,
Животное покидает платформу и появляется в зоне действия датчика 11 оконча5 ния цикла измерений. Блок 14 управления осуществляет включение реверсивного счетчика 16 в режиме Обратный код и производит новый цикл измерения освобожденной платформы.
0 При этом происходит вычитание массы платформы из полной массы (животное + платформа), после чего в реверсивном счетчике 16 остается код числа, соответствующего массе животного, умноженной на
5 количество измерений. После коррекции числа разрядов соответственно количеству разрядов цикла измерений блок 14 управления выдает сигнал на передачу кода, соответствующего массе животного в
0 регистрирующий блок.
Формула изобретения Устройство для измерения массы животного в движении, содержащее платформу с силоизмерительными датчиками, датчики
5 появления животного и окончания цикла взвешивания, преобразователь аналог - код, блок управления, реверсивный счетчик, сумматор и регистрирующий блок, отличающееся тем, что, с целью повышения точности измерения и оптимизации длины
платформы, оно снабжено датчиком положения животного на платформе и блоком сравнения, включающим компаратор и два узла суммирования, входы которых соединены с выходами соответствующих силоиз- мерительных датчиков, выходы узла суммирования соединены с входами компаратора, соединенного выходом с первым входом блока управления, второй вход которого соединен с датчиком положения животного, третий и четвертый - соответственно с датчиками появления животного и окончания цикла взвешивания, пятый - с соответ0
ствующим выходом преобразователя аналог - код, а выходы блока управления - с соответствующими входами реверсивного счетчика, регистрирующего блока и преобразователя аналог - код, при этом выходы силоизмерительных датчиков соединены с выходами сумматора, который выходом соединен с соответствующим входом преобразователя аналог - код, один из выходов которого соединен с соответствующим входом реверсивного счетчика, а выход реверсивного счетчика - с соответствующим входом регистрирующего блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания движущихся объектов | 1985 |
|
SU1288506A1 |
| Дискретное весоизмерительное устройство | 1980 |
|
SU932257A1 |
| МАССОМЕТРИЧЕСКИЙ СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ВЕСА ГРУЗА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2148800C1 |
| Весоизмерительное устройство | 1983 |
|
SU1177679A1 |
| МАССОМЕТРИЧЕСКИЙ СПОСОБ ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ ВЕСА ГРУЗА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2334955C1 |
| Устройство для поосного взвешивания вагонов в движении | 1985 |
|
SU1278603A1 |
| Устройство для взвешивания движущихся железнодорожных составов | 1982 |
|
SU1089427A1 |
| Устройство для взвешивания | 1976 |
|
SU657270A2 |
| Устройство для взвешиваниядВижущиХСя Об'ЕКТОВ | 1978 |
|
SU794393A1 |
| Устройство для взвешивания движущихся объектов | 1984 |
|
SU1183839A1 |
Изобретение относится к весоизмерительной технике и может найти применение в устройствах для взвешивания животных в движении. Устройство содержит весоизмерительную платформу 1 с встроенными си- лоизмерительными датчиками 2-5, блок 6 сравнения, состоящий из компаратора 8 и узлов 7 и 9 суммирования, входы которых соединены с выходами соответственно си- лоизмерительных датчиков 2,3 и 4.5, датчик 10 появления животного, датчик 11 окончательного цикла измерения, датчик 12 положения животного на платформе, сумматор 13 полной массы, блок 14 управления, преобразователь 15 аналог-код, реверсивный счетчик 16 и регистрирующий блок 17. Конструкция позволяет снизить погрешность измерения и оптимизировать длину платформы. 2 ил. Ё
| Устройство для взвешивания движущихсяТРАНСпОРТНыХ СРЕдСТВ | 1979 |
|
SU853410A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения веса животного при его движении | 1982 |
|
SU1040345A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
