Изобретение относится к машиностроению и может быть использовано при создании подвижных роботов.
Целью изобретения является упрощение устройства.
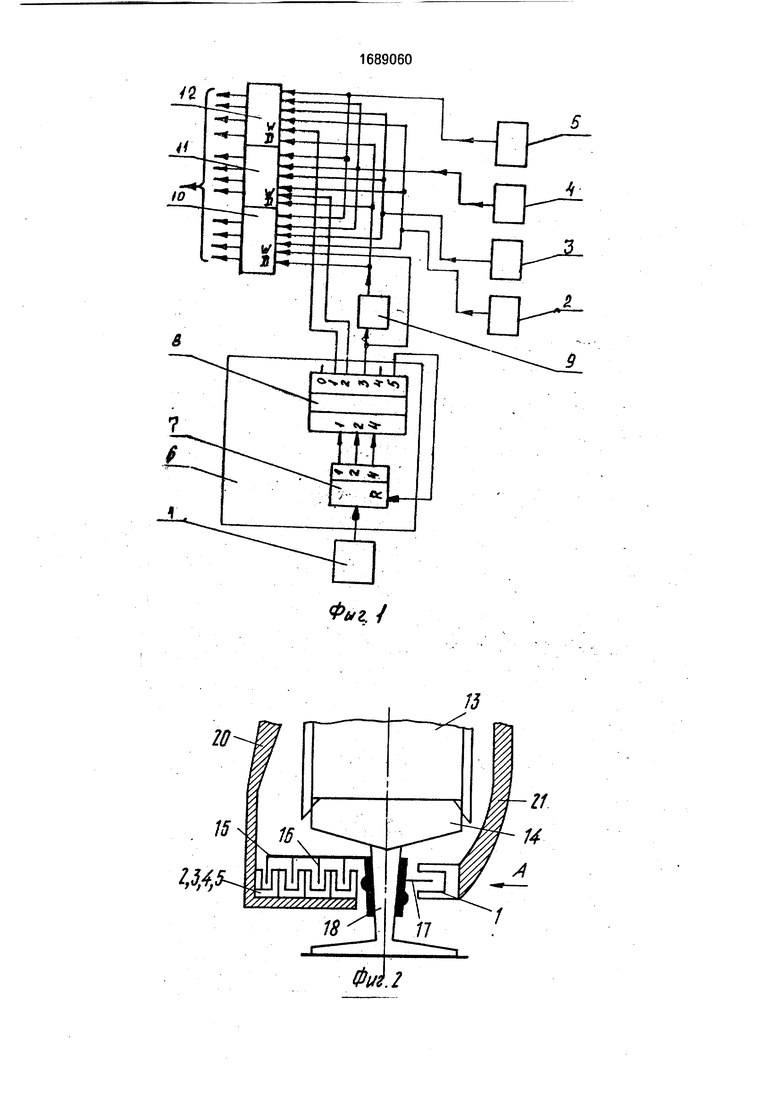
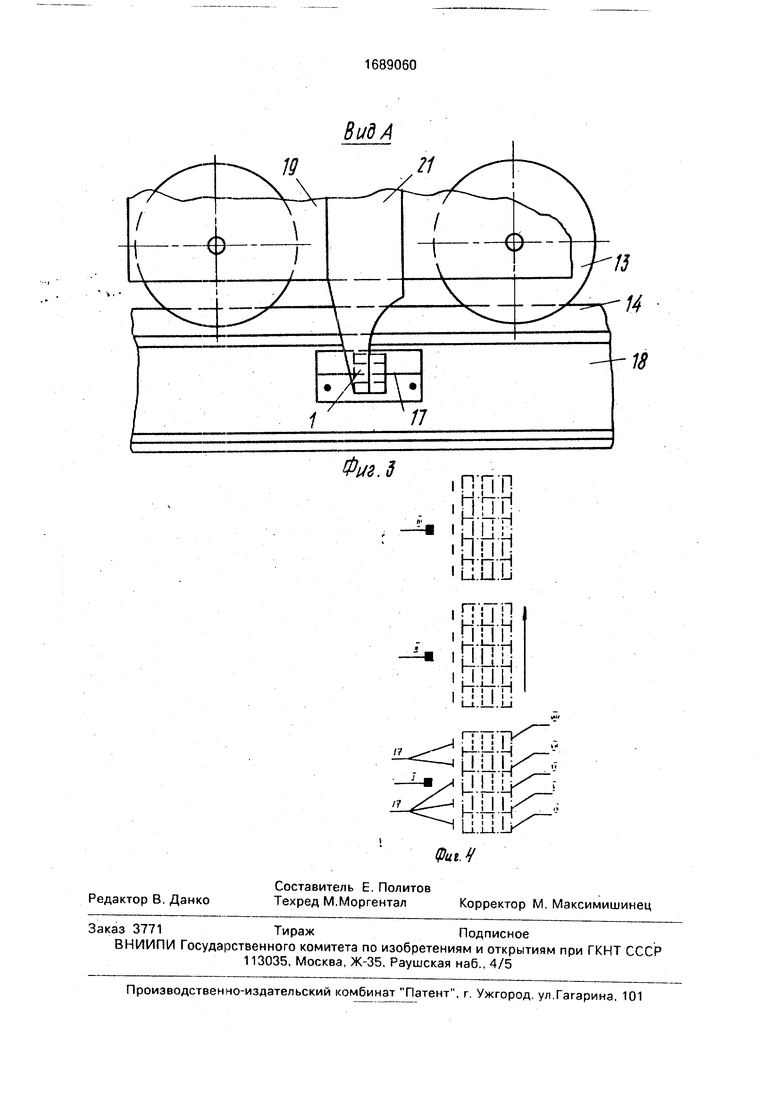
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - конструктивное размещение датчиков положения; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - пространственное размещение пластин датчиков положения.
Устройство содержит датчик 1 перемещения, датчики 2-5 положения, регистр 6 сдвига, двоичный счетчик 7, дешифратор 8, элемент 9 временной задержки, регистры 10 - 12, колеса 13, рельс 14, гребенчатые копиры 15, длинные пластины 16, короткую пластину 17, шейку 18 рельса, корпус подвижного узла 19, кронштейн 20, 21, позиции I, II, III и группы IV, V, VI, VII, VIII пластин.
Устройство работает следующим образом.
Подвижной узел 19, например робот, перемещается по одному нижнему рельсу 14 с помощью двухреберных колес 13, в вертикальной плоскости удерживается с помощью направляющей.
При движении робота происходит взаимодействие датчиков 2-5 положения, а также датчика 1 с группой пластин 16, а также с пластиной 17, соответственно.
Предполагается, что при наличии пластины 16 или 17 в зазоре датчика 2-5 положения на выходе последнего появляется единичный сигнал, а при отсутствии пластины 16 или 17 - нулевой.
Копиры 15 с пластинами 16 могут кре-, питься сваркой на шейке 18 рельса 14 как с левой, так и с правой стороны.
Все позиции, обслуживаемые роботом (рассматривается для примера только горизонтальное перемещение) закодированы двоичным числом (адресом). Причем количество позиций такое, что их нельзя закодировать одной группой копиров 15,
Ј
О 00 О О
о
т.е. одновременно параллельно расположенных пластин 16 поперек шейки 18 рельса. В связи с этим число таких групп может быть две и более. Для примера рассмотрим три группы при максимально возможном числе пластин в группе четыре.
Пластина 17 длиной на 10 мм короче пластин 16 и является одновременно пластиной точного останова. Короткая пластина 17 установлена симметрично относительно центра соответствующей группы длинных пластин.
Предполагается, что необходимое число групп можно разместить на шейке 18 рельса между позициями I, II, III и т.д. вдоль пути робота.
В качестве примера на фиг, 2 показаны четыре датчика 2-5 положения и три группы IV, V, VI (фиг. 4) или VIII, VII, VI, формирующие адрес соответствующей позиции I при движении робота слева или справа соответственно, причем группа IV эквивалентна группе VIII, группа V - группе VII, группа VI (старшая) - общая.
Группы IV - VIII расположены симметрично относительно центра соответствующей позиции I.
Отсутствие пластины в группе отмечено на фиг. 4 пунктиром, для примера на фиг. 4 изображены позиции I, II. Ill с адресами 6261, 6262, 6263 соответственно, предполагая, что пластинам сверху вниз присвоены веса 23, 22, 21,2°.
Принцип контроля местоположения подвижного объекта осуществляется аналогичным образом, как и в известном устройстве, но технически значительно проще.
Действительно, адрес последней пройденной позиции определяется числом, которое формируется на выходе регистров 10-12 следующим образом.
Независимо от направления движения с датчика 1 при перемещении робота одиночные импульсы поступают на вход регистра 6 сдвига. Регистр б выполнен, в частности, в виде двоичного счетчика 7 и дешифратора 8. Выходы дешифратора являются выходами регистра 6, счетный вход счетчика - входом регистра 6, а вход сброса R счетчика - входом сброса R регистра 6.
В зависимости от числа поступающих на счетчик импульсов на одном из вь .одов дешифратора 8 (или регистра 6) будет сигнал. Допустим, что при числе единица сигнал будет на первом выходе дешифратора 8, при числе два - на втором, при числе три - на третьем и т.д. до пятого выхода (так как
для примера используются пять групп IV, V. VI, VII, VIII).
Допустим, что робот движется вперед (по стрелке, фиг. 4) Toifla при первом импульсе с датчика 1 сигнал с первого выхода дешифратора 8 поступает на вход записи W регистра 12. Этим самым обеспечивается запись дискретных сигналов с датчиков 2-5 параллельного кода младшей группы IV
(фиг. 4), составляющей адреса позиции I в регистр 12.
При втором импульсе с датчиков сигналом с второго выхода дешифратора 8 вторая группа V кода адреса занесется в регистр
11. Аналогично, при поступлении третьего импульса код старшей группы VI (фиг. 4) адреса занесется в регистр 10 (фиг. 1).
Одновременно сигнал с третьего выхода регистра 6 запускается элемент 9 временной задержки, который задним фронтом формирует сигнал чтения (D) числа с регистров 10 - 12 на вход блока программного управления движением робота.
Четвертый и пятый импульсы с датчика
1 не управляют регистрами 10 - 12, причем пятый импульс сбрасывает регистр 6 в исходное (нулевое) состояние, подготовившись тем самым для чтения групп следующей позиции.
Если теперь предположить, что робот движется назад, то при первом, втором и третьем импульсах с выхода датчика 1 в регистры 10-12 занесутся, соответственно, группы VI, VII, VIII кода адреса позиции I. A
так как группа IV эквивалентна группе VIII, группа V -- группе VII, то код числа с выхода регистров 10 12 не изменится независимо от направления перемещения.
Применение изобретения позволит значительно упростить устройство.
Формула изобретения Устройство для контроля местоположения подвижного объекта, содержащее последовательно соединенные датчик
перемещения и регистр сдвига, а также три регистра, первый, второй, третий и четвертый вход каждого из которых подключен к выходу первого, второго, третьего и четвертого датчиков положения соответственно, а
пятый вход - к выходу элемента задержки, отличающееся тем, что, с целью упрощения устройства, в нем первый выход регистра сдвига соединен с шестым входом третьего регистра, второй выход - с шестым
5 входом второго регистра, третий выход - с шестым входом первого регистра и входом элемента задержки, а четвертый выход -- со своим вторым входом.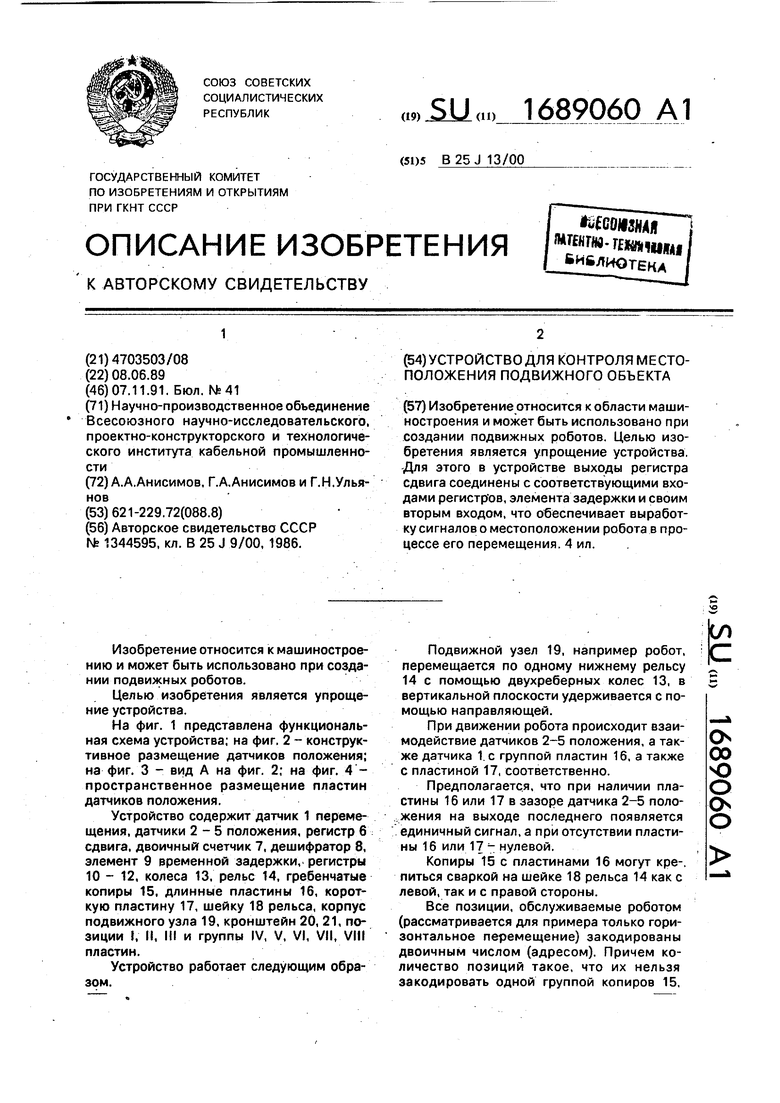

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления подвижным роботом | 1985 |
|
SU1344595A1 |
| Устройство для управления робототехнологическим комплексом | 1989 |
|
SU1780080A1 |
| Устройство для контроля местоположения подвижного объекта | 1986 |
|
SU1393625A1 |
| Устройство для программного управления транспортным механизмом | 1983 |
|
SU1087959A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОДИРОВАНИЯ | 1972 |
|
SU354409A1 |
| Устройство для контроля оперативной памяти | 1989 |
|
SU1705875A1 |
| Устройство для упорядочивания чисел | 1984 |
|
SU1241228A1 |
| Устройство для регистрации временных и информационных процессов | 1986 |
|
SU1363258A1 |
| Устройство для медианной фильтрации двумерных массивов | 1987 |
|
SU1524067A1 |
| Программируемое устройство для вычисления логических функций | 1987 |
|
SU1444744A1 |
Изобретение относится к области машиностроения и может быть использовано при создании подвижных роботов. Целью изобретения является упрощение устройства. Для этого в устройстве выходы регистра сдвига соединены с соответствующими входами регистров, элемента задержки и своим вторым входом, что обеспечивает выработку сигналов о местоположении робота в процессе его перемещения. 4 ил.
W/
W
X
Редактор В. Данко
Составитель Е. Политое Техред М.Моргентал
В ид А
Фщ.9
Р ДЧ
№
И
(Й.1.У
Корректор М. Максимишинец
| Устройство для управления подвижным роботом | 1985 |
|
SU1344595A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
