1139
Изобретение относится к робото- i технике и может быть использовано при создании подвижных роботов
Целью изобретения является упрощение устройства за счет изменения конп струкции копира.
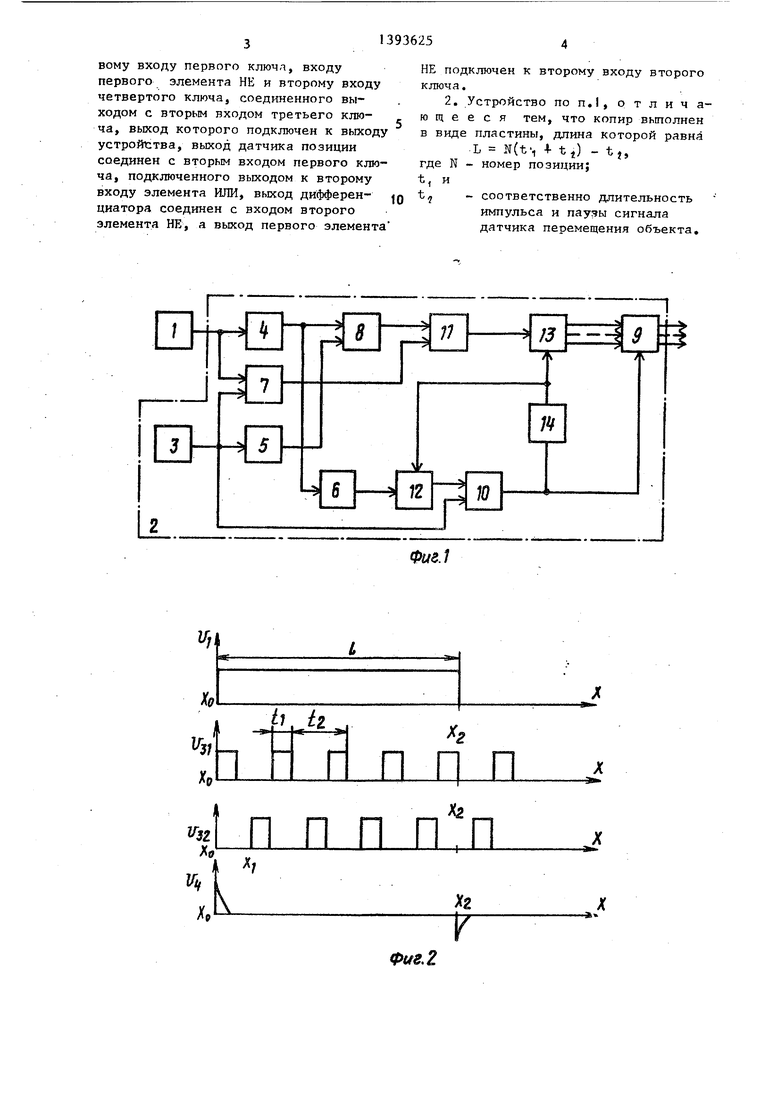
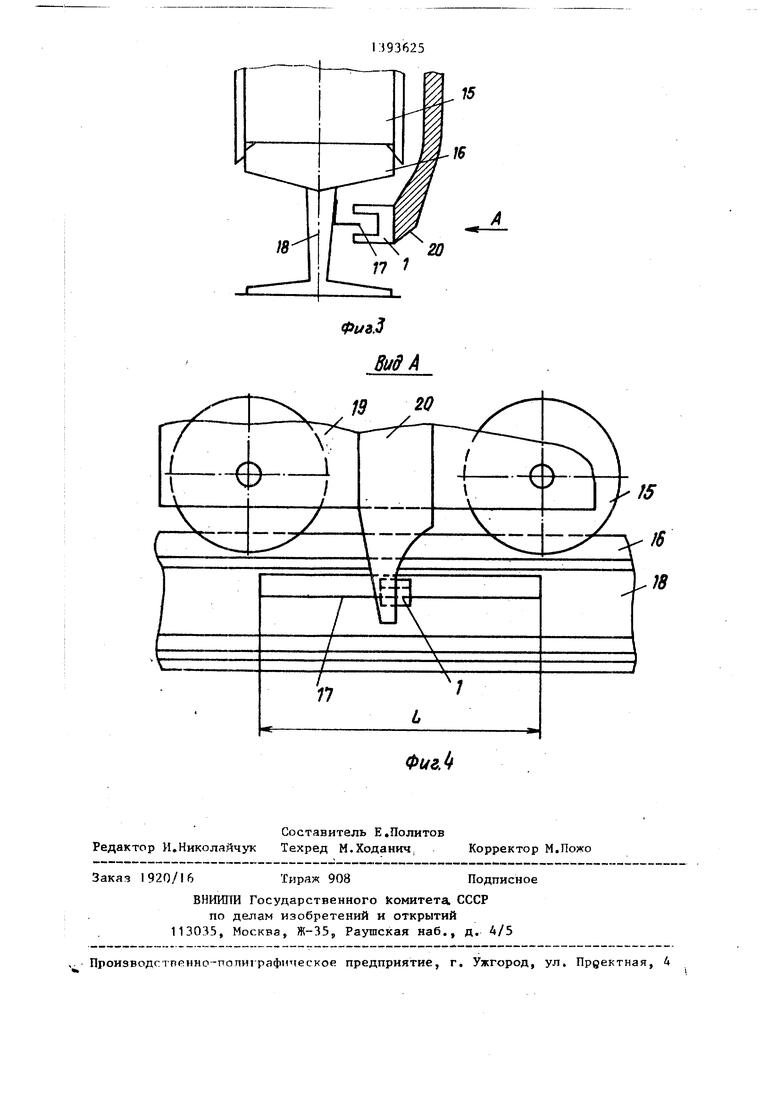
На фиг.1 представлена функциональная схема устройства; на фиг.2 циклограмма работы отдельных блоков} на фиг.З - конструктргоное размещение копира и датчика позиции; на : I фиг«4 вид А на фиг.З.
На фиг,1 - 4 обозначены датчик 1 позиции, блок 2 адресации, датчик 3 перемещения объекта, дифференциатор 4, первый 5 и второй 6 элементы НЕ, - I первый 7, второй 8, третий 9 и четвертый 10 ключи, элемент ШТИ 11, {триггер 12, счетчик 13, элемент 14 I задержки, колеса 15, рельс 16, плас I тина 17 копира, шейка 18 рельса, I корпус 19 подвижного объекта, крон- 1 штейн 20, и , - сигнал датчика 1, и31 и и 32 сигналы с датчика 3,.U4 сигнал с дифференциатора,4, ;: I Устройство работает следующим об разом.
Все позиции, воздё которых движет ся робот, закодированы определенным j I числом (номером), а возле этих пози- ций устанавливается металлическая ;пластина 17, длина L которой опреде- ляется выражением
45
L N(t + t ,) - tj, . 35 де N - номер позиции;
f и
- соответственно длительность
импульса и паузы сигнала д
датчика 3.
Из выражения для L следует, что номер текущей цозиции должен быть строго равен числу Ш пульсов, подсчитанных по время действия импульса
и.
Так как момент х появления импуль са и, строго не синхронизирован с моментом появления 1;дапульса на выходе датчика 3, то неизбежен сдвиг и X X, - X р.
В результате этого на отрезке L всегда имеется число импульсов, на единицу меньшее,
При возникновении импульса U на выходе дифференциатора 4 появляется положительный импульс U
Так как на отрезке их импульса на выходе датчика 3 нет то в данной
55
0 5
О
5
5
д
ситуации появляется сигнал на выход ключа 8 и через элемент ИЛИ 1I импульс записьшается в счетчик 13. В дальнейшем до окончания импульса и на выходе ключа С сигнала нет, а на вход счетчика 13 импульсы поступают с датчика 3 через ключ 7 и элемент ИЛИ 11,
Ключ 7 открыт на время действия импульса По окончании действия импульса и, в счетчике 3 записано число, равное N.
После окончания импульса U по его заднему фронту в момент х формируется отрицательный импульс 114, который через элемент НЕ 6 устанавливает триггер 12 в единичное состояние.
Под действием единичного сигнала с триггера I2 и следующим импульсом с датчика 3 замьйсается ключ 10 и его выходной сигнал открывает ключ 8, обеспечивая прохождение пара,ш1ельного кода со счетчика 13 на выход устройства для дальнейшей отработки блоком программного управления движением робота. Одновременно сигнал с выхода ключа 10 запускает элемент 14 задержки, например одновибратор, который своим сигналом сбрасьшает счетчик I3 и триггер 12 в исходное (нулевое) состояние. Таким образом, осуществляются коррекция и устранение
5
погре1вдостив Если сдвиг /1х О, то и в этом случае счетчик 13 на интервале L фиксирует число, равное N.
Ф о р м у л а из обретения
1„ Устройство для контроля местоположения подвижного объекта, содержащее датчик перемещения объекта, датчик позиции, установленный на подвижном объекте, и копир, установленный на неподвижном основании., отличающееся тем, что, с целью упрощения конструкции, оно дополнительно содержит первый ключ, первый элемент НЕ, последовательно соединенные дифференциа;тор, второй ключ, элемент ИЛИ, счетчик и третий ключ, а также последовательно подключенные второй элемент НЕ, триггер, четвертый ключ и элемент задержки, выход которого соединен с вторым входом счетчика и триггера, выход
которого соединен с вторым входом счётчика и триггера, выход датчика переме1ие 1ия объекта подключен к первому входу первого ключа, входу первого элемента НЕ и второму входу четвертого ключа, соединенного выходом с вторым входом третьего ключа, выход которого подключен к выходу устройства, выход датчика позиции соединен с вторым входом первого ключа, подключенного выходом к второму входу элемента ИЛИ, выход дифферен- циатора соединен с входом второго элемента НЕ, а выход первого элемента
НЕ подключен к второму входу второго ключа,
2. Устройство поп,1,отлича- ю щ е е с я тем, что копир выполнен в виде пластины, длина которой равна
L N(fi 4- tj) - t, где N - номер позиции;
и
- соответственно длительность импульса и паузы сигнала датчика перемещения объекта.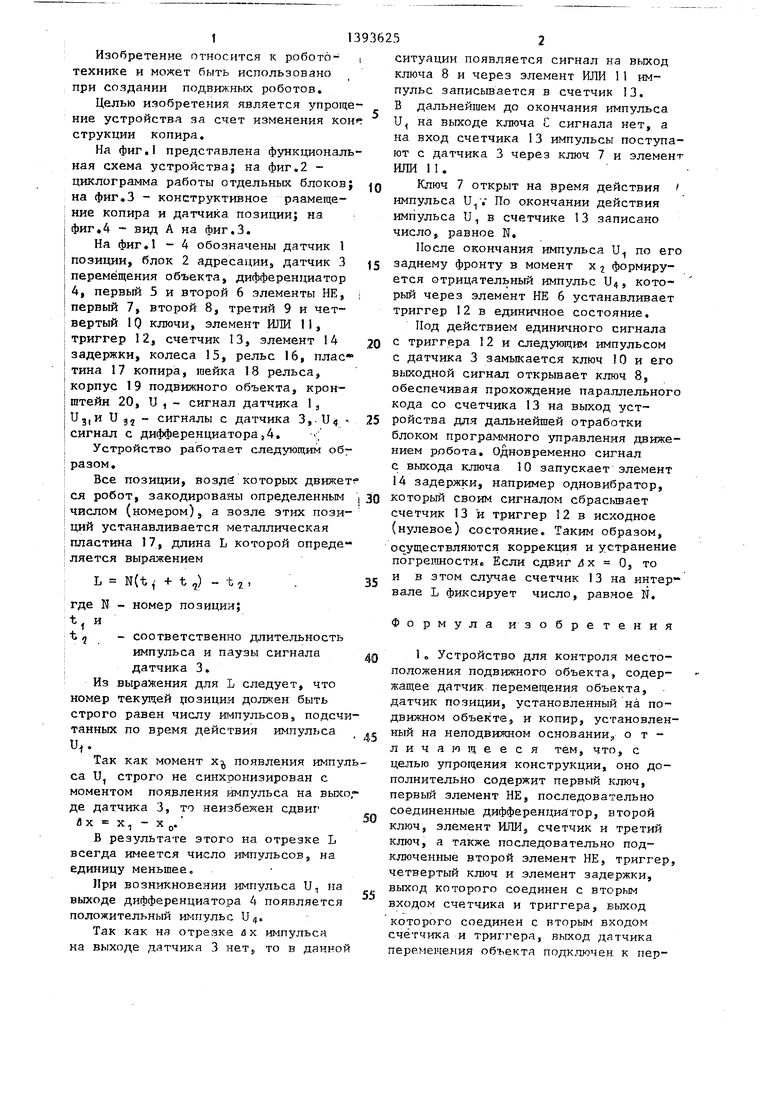
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления подвижным роботом | 1985 |
|
SU1344595A1 |
| Устройство для контроля местоположения подвижного объекта | 1989 |
|
SU1689060A1 |
| Устройство для перемещения контейнеров от автоматических линий на стационарный склад | 1983 |
|
SU1276594A1 |
| Устройство для управления робототехнологическим комплексом | 1989 |
|
SU1780080A1 |
| Устройство для автоматического адресования движущихся объектов | 1989 |
|
SU1612316A1 |
| Устройство для взвешивания транспортных объектов в движении | 1984 |
|
SU1236322A1 |
| Цифровая система управления | 1986 |
|
SU1357917A1 |
| Адаптивная система автоматического управления для нестационарных объектов с запаздыванием | 1986 |
|
SU1451644A1 |
| Устройство для считывания информации с подвижного объекта | 1980 |
|
SU948732A2 |
| Устройство для управления промышленным роботом | 1981 |
|
SU970320A1 |
Изобретение относится к области робототехники и может быть использовано при создании подвижных роботов. Целью изобретения является упрощение конструкции устройства. Для этого в устройство, содержащее датчик перемещения подвижного объекта, датчик позиции, установленный на подвижном объекте, и копир, установленный на неподви кном основании, дополнительно введены схема управления, включающая логические элементы НЕ, ИЛИ, а также ключи, дифференциатор, триггер, элемент задержки и счетчик, при этом копир выполнен в виде пластины, длина которой определяется номером позиции и параметрами сигнала датчика перемещения объекта. 1 з.п. ф-лы, 4 ил. с 5 (Л
Фиг. 2
Физ.З
Вид A
Ф14ЪМ
| Винарик А.А | |||
| и др | |||
| Автоматический указатель местонахождения движущихся объектов.- Механизация и автоматизация производства, 1982, № 2, Авторское свидетельство СССР №515633, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
