Изобретение относится к машиностроению и может быть использовано при создании подвижных роботов.
Целью изобретения является расширение технологических возможностей и упрощение конструкции устройства за счет обеспечения nporpaMNtHpoaa- ния большего количества датчиков положения .
На фиг.1 представлена функциональная схема предлагаемого устройства; на фиг.2 - функциональная схема блоВсе позиции,обслузкиваемые робоков программного управления и управления электроприводом; нафиг.З-кон- 15 том (рассматривается для примера структивное размещение датчиков положе- только горизонтальное перемещение), пня и гребенчатьЕх: копиров; на фиг.4 вид Л на фиг.З; на фиг.5 - пространственное размещение пластин датчиков положения.
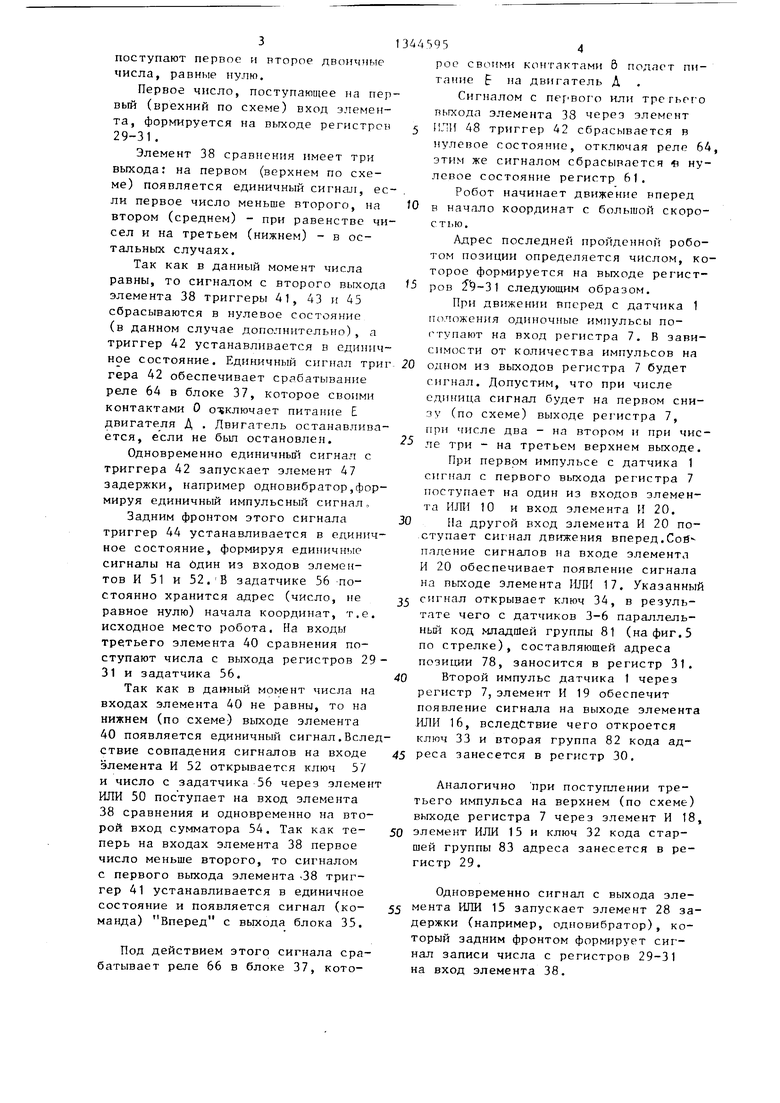
Устройство для управления подвижным роботом содержит датчики 1 и 2 направления перемещения, датчики 3-6 положения, регистры 7 и 8,элементы ИЛИ 9-17, элементы И 18-27, элемент 8 задержки, регистры 29-31, ключи 32-34, блок 35 программного управления, датчики 36 наличия объекта,блок 37 управления электропривода. Кроме того, устройство содержит Щ1ф- ропые элементы 38-40 сравнения, rpnrrepiii 41-46, элемент 47 задержки, элементы ИЛИ 48-50, элементы И 51-53, сумматор 54, задатчики 55 и 56, ключи 57-59, генератор 60 импульсов, регистр 61, задатчики 62 адресов, реле 63-66, контакты О , л , Н , б , днигатель Д , питание Е , резистор R, колеса 67, рельс 68, гребенчатые копиры 69, пластины 70, блок 71 датчиков, пластршы 72 и 73 копиров, шейку 74, корпус 75 подвижного узла, кронштейны 76 и 77.
1а фиг. 5 схематично показаны три позипии 78-80 и группы пластин 81-85.
Устройство работает следующим образом. I
Подвижной узел 75 (фиг.З и 4) , например робот, перемещается по одному нижнему рельсу 68 с помощью двухреберных колес 67, а в вертикальной плоскости удерживается с помо наг1ранляюп1ей, расположенной в верхней части. При движении робота происходит взаимодействие датчиков 3-6 положения блока 71, а также дат- иков 1 и 2 с группой пластин 70, а также с пластинами 72 и-73 соответственно. Предполагается,- что при на20
25
30
35
40
45
50
закодированы двоичным числом (адресом) . Причем количество адресов т кое, что их нельзя закодировать одн группой копиров 69, т.е„ одновремен параллельно расположенных пластин 70 поперек шейки 74 рельса 68, в св зи с чем число таких групп может бытБ две и более.
Пластины 72 и 73 длиной 10 мм ко роче пластины 70 и являются одновременно пластинами точного останов
Короткие пластины 72 и 73 (фиг.З установлены симметрично относительно центра соответствующей группы 81-85 длинных пластин. Предполагается, что необходимое число групп можно разместить на шейке 74 рельса 68 между позициями 78-80 и т.д. вдоль пути движения робота.
Блок 71 состоит из четырех датчиков и трех групп 81-83 или 83-85, формирующих адрес соответствующей позиции 78 при движении слева и спр ва соответственно, причем группа
81эквивалентна группе 85, группа
82- группе 84, группа 83 (старшая) общая. Группы 81-85 расположены сим метрично относительно центра соответствующей позиции 78.
Отсутствие пластины в группе отмечено на фиг.5 пунктиром, для пр мера изображены позиции 78-80 с адресами 6261, 6262, 6263 соответств е по, предполагая, что пластинам свер ху вниз присвоены веса 2. 2.
2 2
При включении питания регистры 7 gg и 8, 61, регистры 29-31,триггеры 41-46 (фиг. 1 и 2) сбрасываются в на чальное нулевое (исходное) состояние, вследствие чего на первый и второй входы элемента 38 сравнения
личии пластины в зазоре датчика положения на выходе последнего появляется единичный сигнал, а при отсутствии пластины - нулевой.
Блок 71 крепится на кронштейне 77, а датчики 1 и 2 - на кронштейне 76. Все датчики 1-6 установлены в зоне пластин 70 между колесами 67 подвижного узла 75.
Копиры 69 с пластинами крепятся сваркой на шейке 74 рельса 68 как с левой, так и с правой стороны.
Все позиции,обслузкиваемые роботом (рассматривается для примера только горизонтальное перемещение),
5 том (рассматривается для примера только горизонтальное перемещение),
0
5
0
5
0
5
0
закодированы двоичным числом (адресом) . Причем количество адресов такое, что их нельзя закодировать одной группой копиров 69, т.е„ одновременно параллельно расположенных пластин 70 поперек шейки 74 рельса 68, в связи с чем число таких групп может бытБ две и более.
Пластины 72 и 73 длиной 10 мм ко- роче пластины 70 и являются одновременно пластинами точного останова.
Короткие пластины 72 и 73 (фиг.З) установлены симметрично относительно центра соответствующей группы 81-85 длинных пластин. Предполагается, что необходимое число групп можно разместить на шейке 74 рельса 68 между позициями 78-80 и т.д. вдоль пути движения робота.
Блок 71 состоит из четырех датчиков и трех групп 81-83 или 83-85, формирующих адрес соответствующей позиции 78 при движении слева и справа соответственно, причем группа
81эквивалентна группе 85, группа
82- группе 84, группа 83 (старшая) - общая. Группы 81-85 расположены симметрично относительно центра соответствующей позиции 78.
Отсутствие пластины в группе отмечено на фиг.5 пунктиром, для при мера изображены позиции 78-80 с адресами 6261, 6262, 6263 соответств е Г- по, предполагая, что пластинам сверху вниз присвоены веса 2. 2.
2 2
При включении питания регистры 7 gg и 8, 61, регистры 29-31,триггеры 41-46 (фиг. 1 и 2) сбрасываются в начальное нулевое (исходное) состояние, вследствие чего на первый и второй входы элемента 38 сравнения
поступают первое н второе двоичные числа, равные нулю.
Первое число, поступающее па первый (врехний по схеме) вход элемеп- та, формируется на выходе регистров 29-31.
Элемент 38 сравнения имеет три выхода: на первом (верхнем по схеме) появляется единичный сигнал, если первое число меньше второго, на втором (среднем) - при равенстве чисел и на третьем (нижнем) - в остальных случаях.
Так как в данный момент числа равны, то сигналом с второго выхода элемента 38 триггеры 41, 43 и 45 сбрасываются в нулевое состояние (в данном случае дополнительно), а триггер 42 устанавливается в единичное состояние. Единичный сигнал три гера 42 обеспечивает срабатывание реле 64 в блоке 37, которое своими контактами О о чключает питание Е двигателя Д . Двигатель останавливается, если не бьш остановлен.
Одновременно единичный сигнал с триггера 42 запускает элемент 47 задержки, например одновибратор,формируя единичный импульсный сигнал,
Задним фронтом этого сигнала триггер 44 устанавливается в единичное состояние, формируя единичные сигналы на один из входов элементов И 51 и 52. В задатчике 56 постоянно хранится адрес (число, не равное нулю) начала координат, т.е. исходное место робота. На входы третьего элемента 40 сравнения поступают числа с выхода регистров 29 31 и задатчика 56.
Так как в данный момент числа на входах элемента 40 не равны, то на нижнем (по схеме) выходе элемента 40 появляется единичный сигнал.Вследствие совпадения сигналов на входе элемента И 52 открывается ключ 57 и число с задатчика 56 через элемент ИЛИ 50 поступает на вход элемента 38 сравнения и одновременно на второй вход сумматора 54. Так как теперь на входах элемента 38 первое число меньше второго, то сигналом с первого выхода элемента 38 триггер 41 устанавливается в единичное состояние и появляется сигнал (команда) Вперед с выхода блока 35.
Под действием этого сигнала срабатывает реле 66 в блоке 37, кото
JO
20
25
3445954
рое своими контактами 6 подаст питание f на двигатель Л
Сигналом с первого или тре гьп о выхода элемента 38 через элемент ПЛИ 48 триггер 42 сбрасывается в нулевое состояние, отключая реле 64, этим же сигналом сбрасывается « ну- легзое состояние регистр 61.
Робот начинает движение вперед в начало координат с большой скороСТ1,Ю.
Адрес последней пройденной роботом позиции определяется числом, которое формируется на выходе регист- 5 ров -31 следующим образом.
При движении вперед с датчика 1 положения одиночные импульсы по- ( тупают на вход регистра 7. В зависимости от количества импульсов на одном из выходов регистра 7 будет сигнал. Допустим, что при числе единица сигнал будет на первом снизу (по схеме) выходе регистра 7, при числе два - на втором и при числе три - на третьем верхнем выходе.
При первом импульсе с датчика 1 сигнал с первого выхода регистра 7 поступает на один из входов элемента ИЛИ 10 и вход элемента И 20.
На другой вход элемента И 20 по- .ступает сигнал движения вперед.Сой падение сигналов на входе элемента И 20 обеспечивает появление сигнала на выходе элемента ИЛИ 17. Указанный сигнал открывает ключ 34, в результате чего с датчиков 3-6 параллель- ньй код младшей группы 81 (на фиг. 5 по стрелке), составляющей адреса позиции 78, заносится в регистр 31.
Второй импульс датчика 1 через регистр 7,элемент И 19 обеспечит появление сигнала на выходе элемента ИЛИ 16, вследствие чего откроется ключ 33 и вторая группа 82 кода ад- 5 реса занесется в регистр 30.
30
35
40
Аналогично при поступлении третьего импульса на верхнем (по схеме) выходе регистра 7 через элемент И 18, элемент ИЛИ 15 и ключ 32 кода стар- щей группы 83 адреса занесется в регистр 29.
Одновременно сигнал с выхода эле- мента ИЛИ 15 запускает элемент 28 задержки (например, одновибратор), который задним фронтом формирует сигнал записи числа с регистров 29-31 на вход элемента 38.
Таким образом, мы получаем две- надцатизарядное число. Первый и второй импульсы датчика 1 через элемент ИЛИ 10, элемент И 25, элемент ИЛИ 13 сбрасывают регистр 8 движения назад в нулевое состояние.
Сброс регистра 8 осуществляется также вторым или третьим импульсом датчика 1 через :)лемент ИЛИ 9, элемент И 24 и элемент ИЛИ 13, но при движении робота назад.
В задатчике 55 постоянно хранится двоичное число, указывающее момент перехода на малую скорость. В сумматоре 54, на вход которого поступают числа с выхода регистров 29-31 и с выхода элемента HJM 50, происходит вычисление модуля разности этих чисел.
Сигнал на выходе элемента 39 С1завнения появляется лишь в том случае, когда 1 ходные числа равны,
Выходной единичный сигнал эле- л СМ1та 19 устанавливает триггер 45 и единичное состояние, вследствие чего срабатьпк1ет реле 63 в блоке 37, которое своими контактами Л включает в цепь двигателя Д ограиичивЕПо щи; резистор R и понижггет скорость дв11же1и я робота.
Г спи в}:одные чпсла элемента 39 не раним, го робот пдшжется с ранее выбранно скоростью и и прежнем напр;Г г;;1ени1.
O l KjTifincHjie малой )(1сти осуще- г BMiu -rrj-i t;6pocoM тр; ггера 45 в у- лгвое состояние сигналом с второго p.bixojv элемента 38.
TaiuiM образом, осуществляется на чаль1П) запуск и формирова(П}е коман дь1 блптсом 35 па поремегцение р1.)бота вперед, в начало координат, в исход П{1С состояние .
Как тольк(5 робот приблизится к началу координат, то числа элемента 38 будут равны п с игпалом с второго выхода элемента 38 триггера 42 устанавливается в единичное состоя П1е, срабаты; ает реле 64 и робот останавлп1 ается, Этим же сигналом с в.()да триг гера 42 (как описано ранее) запускается элемент 47 задер;кки, задним фронтом триггер 44 уста(ав.г1ивается в единичное состояние, (;)о}1мируя сигналы на отдельных jxsxiiax элементов И 51 и 52.
Так к,:;к в данный мo :oнт робот на xojijiTc.n и начале координат, то рав
44595 ны
)0
}5
20
25
30
35
входные числа элемента 40 сравнения, вследствие чего на верхнем выходе элемента 40 появляется единичный сигнал, обеспечивая совпадение сигналов на входах элемента И 51 Выходной сигнал элемента И 51 уста- нав1П1вает триггер 46 в единичное состояние.
Сигналом с триггера 46 открывается ключ 58, вследствие чего импульсы генератора 60 поступают на ре- т истр 61 сдвига. Регистр 61 имеет п выходов, где п - число позиций.Пер- вы;1 выход регистра 61 подключен к первому входу первого из п элементов И 53, другой вход элемента И 53 подключен к выходу первого из п датчиков 36, регистрирующих наличие контейнера в первой позиции.
Последний выход регистра 61 подключен к первому входу п-го элемента И 53, а другой вход элемента И 53- к выходу п-го датчика 36.
На первые входы соответствующих элементов И 53 последовательно во времени подаются единичные сигналы с соответствующих выходов ре.гист- ра 6 1 .
Если место в позигщи пустое, т.е. туда можно ехать роботу и ставить кон- Teiniep, то на выходе соответствую- meixi датчика 36 будет единичный сигнал. Совпадение входных сигналов на одном пз первых элементов И 53 обеспечивает посредством элемента ИЛИ 49 сброс триггера 46 в нулевое со- с о 1ние, закрывается ключ 58 и прекращается поступление импульсов генератора 60 на вход регистра 61,
0
5
0
5
Выходной единичный сигнал перво- из элементов И 53 открывает ключ и через элемент ИЛИ 50 обеспечиго
59
вает считывание кода с соответствующего задатчика 62, который поступает на входы элемента 38 и сумма- ора 54, Лисло с выхода элемента ИЛИ 50 указывает ал,рес позиции, куда надо ехать роботу. Так как тепер входные числа элемента 38 не равны, то в зависимости от их соотношения появится выходной сигнал на первом или третьем выходе элемента 38, а с в 1.1хода всего блока 35 сформируется команда вперед или назад соответст- Beinio.
Робот начнет перемещаться с соот- Бетствующей скоростью к выбранной позиции и остановится у нее.
/
При движении робота назад формируется сигнал с выхода блока 33, при использовании соответствующих
выходов регистра 8, элементов 11, 12, 21, 22, 23, 26, 27, 14 - 17, ключей 32-34 и регистров 29-31 аналогичным образом формируется параллельный двоичный код числа на вход блока 35.
Причем значения весов разрядов регистрах 29-31 не меняются, т.е. всегда младший разряд кода крайний справа, а ставший - крайний слева.
Таким образом осуществляется последовательно-параллельное фор№1- рование кода адреса позиции, расширяющее возможности адресации li совмещающее положительные качества параллельного принципа снятия информации с течки зрения возможности ее самокорректировки.
Формула изобретения
Устройство для управления подвижным роботом, содержащее четыре датчика положения, блок программного управления, первьп, второй, третий и четвертый выходы которого соединены с соответствующими входами блока управления электроприводом, о т л и- чающееся тем, что, с целью расширения технологических возможностей и упрощения, оно дополнительно содержит два датчика направления пе- ремещения, пять регистров, девять элементов ИЛИ, десять элементов И, три ключа, элемент задержки и датчики наличия объекта, выходы которых соединены с первыми входами блока программного управления, подключенного первым выходом к первому входу первого, второго, третьего, восьмого и девятого элементов И, а вторым выходом к первому входу четвертого, пятого, шестого, седьмого и десятого элементов И, первый выход первого регистра соединен с первым входом первого элемента ШБ1 и вторым входом первого элемента И, выход которого подключен к первому входу седьмого элемента ИЛИ, соединенного выходом с первым входом первого ключа и третьего,четвертого и пятого регистров, выходы которых подключены к вторым входам блока программного управления, второй выход первого регистра
jg
0
5
0
-5 0
0
5
5
5958
CiieaiiHeH с nopBiiiM входом nroptM-o тлг- мента ИЛИ и вторым входом первого элемента ИЛИ и второго элемента И, подключенного выходом к первому входу восьмого элемента ИЛИ, выход которого соединен с первым входом второго ключа, подключенного выходагчи к BTopfiiM входам четвертого регистра, третий выход первого регистра соединен с вторым входом второго элемента ИЛИ и третьего элемента И, выход которого подключен к первому входу третьего ключа, соединенного выходами с ,вторыми входами пятого регистра, первый выход второго регистра подключен к первому входу третьего элемента ИЛИ и второму входу четвертого элемента И, выход которого соединен с вторым входом седьмого элемента iUlIf, второй выход второго регистра подключен к первому входу четвертого элемента ИЛИ и второму входу третьего элеме {та ИЛИ и пятого элемента И, соединенного выходом с вторым входом восьмого элемента ИЛИ, третий выход второго регистра подключен к второму входу четвертого элемента ИЛИ и шестого элемента И, выход которого соединен с вторым входом девятого элемента И, выход первого эле- ИЛИ подключен к второму входу седьмого элемента И, соединенного выходом с первым входом пятого элемента ИЛИ, второй вход которого подключен к выходу восьмого элемента И, а ги,1ход - к первому входу второго регистра, соединенного вторым входом с выходом второго датчика напряжения перемещения, выход второго элемента ИЛИ подключен к второму входу восьмого элемента И, выход третьего элемента ИЛИ соединен с вторым входом девятого элемента И, выход которого подключен к первому входу шестого элемента ИЛИ, соединенного вторьгм входом с выходом десятого элемента И, а выходом с первым входом первого регистра, второй вход которого подключен к выходу первого датчика направления перемещения, выход первого, второго, третьего и четвертого датчика положения соединен соответственно с вторым, третьим, четвертым и пятым входом первого, второго и третьего ключей, а ВЬЕХОДЫ первого к.люча подключены к вторым входам третьего регистра.
- -
-
Ю
f
«i
4
f t t.
If)
ч
fs
k/ /
Hfji-,.
o
N
/,/
t
iEi
Д
IE)
Ji IIII
i
CM
S
M; . Ml , I .tt II J : I .t
lit t .1

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля местоположения подвижного объекта | 1989 |
|
SU1689060A1 |
| Устройство для управления робототехнологическим комплексом | 1989 |
|
SU1780080A1 |
| Устройство для контроля местоположения подвижного объекта | 1986 |
|
SU1393625A1 |
| Устройство для перемещения контейнеров от автоматических линий на стационарный склад | 1983 |
|
SU1276594A1 |
| Устройство автоматического контроля веса материала в бункерах | 1985 |
|
SU1255870A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕМНОГО РАСХОДА ЖИДКОСТИ | 1991 |
|
RU2012848C1 |
| Цифровая система управления | 1986 |
|
SU1357917A1 |
| Устройство контроля веса материала в бункерах | 1980 |
|
SU972243A1 |
| Устройство для ввода информации | 1987 |
|
SU1509914A1 |
| Устройство для автоматического контроля веса материала в бункерах | 1980 |
|
SU964475A2 |


Изобретение относится к области машиностроения и может быть использовано при создании подвижных роботов. Целью изобретения является расширение технологических возможностей и упрощение конструкции устроГютва за счет обеспечения программиронания большего количества точек позиционирования без увеличения количестпа датчиков положения. Для этого в устройство, содержащее блок программного управления, свя-занньи с блоком управления электроприводом робота, а также четыре датчика положения, установленных на подвижном узле робота, введены датчики наличия объекта,подключенные к входу блока программного управления, датчики направления перемещения, связанные через регистры с соответствующими группами логических элементов 1-1ПИ, И, который в свою очередь связаны с выходом блока программного управления. Выходные сигналы логических элементов управляют работой группы ключей, через которые сигналы датчиков положения поступают на соответствующие регистры, формирующие информационный сигнал, поступающий на вход блока программного управления. 5 ил. S (Л ел со ел
/ «%
{
(риг 2
67
дуиаЗ
видА
6в 74
/
7В
I 77 73 7 77 72
i i Г
-ч
т
:i.-i---d b f -i
81 62 S3 ел. 85
Редактор Ю.Середа
Составитель Е.Пблитов Техред Л.Олийнык
Заказ 4882/17. Тираж 951Подписное
ВНИНГВ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д,4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,А
фиеЛ72
79
I
pjz.i:iii.-irq
, J iM
.1-Z.1
LITJ b-ti-J
Корректор И. Муска
| Винарик А.А | |||
| и др | |||
| Автоматический указатель местонахождения движущихся объектов | |||
| - Механизация и автоматизация производства, 1982, № 2 | |||
| Устройство для управления перемещением подвижных узлов,например, исполнительных механизмов работаманипулятора | 1974 |
|
SU515633A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
