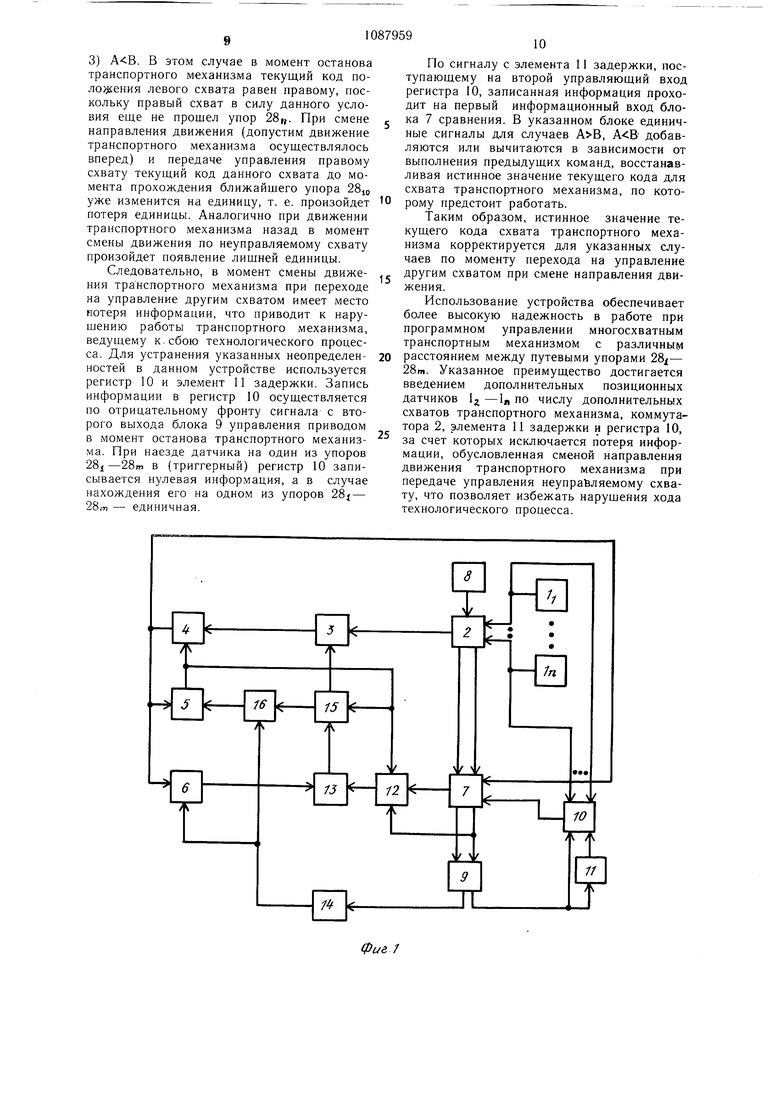
Изобретение относится к автоматике и может быть использовано, в частности, для управления многосхватным транспортным механизмом гальваноавтомата по заданной программе. Известно устройство для программного управления передвижением подвижного объекта, содержащее блок задания программы, датчик путевых импульсов, блок сравнения, блок управления, блок коррекции и блок точного останова, причем блок коррекции содержит датчик внутришаговых импульсов, кинематически связанный с приводом и соединенный с входом счетчика, схему ИЛИ, подключенную своими входами к датчику путевых импульсов и к одному из выходов счетчика, а выходом - к одному из входов блока формирования единичного импульса, другой вход которого соединен с вторым выходом счетчика, а выход подключен к блоку сравнения и к пулевому установочному входу счетчика; блок точного останова содержит триггер, входы которого подключены к предварительному и оконечному выходам блока сравнения, и схему совпадений, один вход которой соединен с выходом триггера, другой - с одним из выходов счетчика блока коррекции, а выход подключён к блоку управления приводом 1 . Это устройство имеет низкую надежность работы, обусловленную появлением сигналов помехи, вызывающих ошибки адресования, а при использовании его для управления многосхватпым транспортным механизмом также потерей информации, вызванной передачей управления одним схватом другому при смене направления движения многосхватного (например, щироко применяемого в гальванотехнике двухсхватного) транспортного механизма. Наиболее близким техническим решением к изобретению является устройство для программного управления, содержащее последовательно соединенные позиционныйдатчик, элемент ИЛИ, первый элемент И, блок сравнения и блок управления приводом, блок ввода программы, подключенный к блоку сравнения, триггер и счетчик, соединенные с первым элементом И, генератор импульсов и последовательно соединенные- преобразователь кода, компаратор, дешифратор и второй элемент И, выход которого подключен через триггер к преобразователю кода, первому элементу И и дещифратору, а другой вход через генератор импульсов и блок управления приводом - к первому и второму выходам блока сравнения, второй и третий выходы которого соединены с первым и вторым входами преобразователя кода, выход генератора импульсов через счетчик подключен к другому входу компаратора, а второй выход дещифратора соединен с вторым входом элемента ИЛИ 2. Однако указанное устройство не обеспечивает достаточно высокой надежности работы многосхватного транспортного механизма вследствие потери информации при смене направления движения и передаче управления неуправляемому схвату в условиях прохождения транспортным механизмом различных расстояний между путевыми упорами, что приводит к нарушению хода технологического процесса. Целью изобретения является повышение надежности устройства. Поставленная цель достигается тем, что в устройство для программного управления транспортным механизмом, содержащее блок ввода программы, первый датчик положения, элемент ИЛИ, соединенный первым входом с первым выходом дешифратора, а выходом - с первым входом первого элемента И, подключенного выходом к первому управляющему входу блока сравнения, к сбросовому входу счетчика импульсов и к нулевому входу триггера, связанного единичным входом с выходом второго элемента И, а выходом - с вторым входом первого элемента И, с первым входом преобразователя кодов и с первым входом дещифратора, подключенного вторым выходом к первому входу второго элемента И, соединенного вторым входом с выходом генератора импульсов и со счетным входбм счетчика импульсов, подключенного выходом к первому входу компаратора, связанного выходом с вторым входом дешифратора, а вторым входом - с выходом преобразователя кодов, подключенного вторым входом к первому выходу блока сравнения, соединенного вторым выходом с первым входом блока управления приводом, а третьим выходом - с третьим входом преобразователя кодов и с вторым входом блока управления приводом, подключенного первым выходом к входу генератора импульсов, введены коммутатор, вторые датчики положения, регистр и элемент задержки, подключенный входом к второму выходу блока управления приводом и к первому управляющему входу регистра, а выходом - к второму управляющему входу регистра, соединенного выходом с первым информационным входом блока сравнения, а информационными входами - с выходами первого и вторых датчиков положения и с первыми входами коммутатора, подключенного вторым входом к выходу блока ввода программы, первым выходом - к второму входу элемента ИЛИ, а вторым и третьим выходами - к вторым информационным входам блока сравнения. На фиг. 1 представлена блок-схема устройства; на фиг. 2 - блок-схема блока сравнения; на фиг. 3 - блок-схема блока управления приводом; на фиг. 4 - циклограмма, поясняющая принцип работы устройства. Устройство содержит датчики положения 1с,...,In (по числу схвотов транспортного механизма), коммутатор 2, элемент ИЛИ 3, первый элемент И 4, триггер 5, счетчик 6, импульсов блок 7 сравнения, блок 8 ввода программы, блок 9 управления приводом, регистр 10,элемент 11 задержки, преобразователь 12 кодов, компаратор 13, генератор 14 импульсов, дешифратор 15 и второй элемент И 16. Блок 7 сравнения (фиг. 2) содержит включенные последовательно триггерный регистр 17, второй дешифратор 18, второй элемент задержки.19, регистр 20 сдвига, второй элемент ИЛИ 21, реверсивный счетчик 22 и второй блок 23 сравнения кодов. Блок 9 управления приводом (фиг. 3) содержит третий дешифратор 24, реверсивный тиристорный пускатель 25, третий элемент ИЛИ 26, элемент НЕ 27. Коммутатор 2 выполнен на интегральных микросхемах К155-КП5, осушествляющих канальную коммутацию без стробирования. Счетчик Импульсов 6 выполнен на интегральной микросхеме К155ИЕ2, представляюш,ий собой двоично-десятичный четырехразрядный счетчик, работаюший в коде 1-2-4-8. Блок 8 ввода программы, выполненный на базе фотоэлектрического устройства ввода с перфоленты типа FS-1501, предназначен для последовательной выдачи информации о признаках работы, кодах адреса следования и режима работы схватов транспортного механизма. Регистр 10 включает п тактируемых триггеров по числу датчиков положения If- ц, управляемых ло раздельным входам. Компаратор 13 выполнен на интегральных микросхемах К155ЛА2, представляюших собой логические элементы 8И-НЕ. Устройство работает следуюшим образом. При движении транспортного механизма в любом направлении датчики положения Ij - In вырабатывают в момент прохож дения путевых упоров 28 28, расстояние между которыми может быть как постоянным, так и переменным, импульсы, поступающие на соответствующие входы коммутатора 2, который в зависимости от признака работы схвата, задаваемого блоком 8 ввода программы, разрешает прохождение сигнала соответствуюшего датчика на второй вход элемента ИЛИ 3. Выходной сигнал с элемента ИЛИ 3 поступает на первый вход элемента И 4, на второй вход которого подается сигнал с выхода триггера 5. При этом сигнал, равный единице, на втором входе элемента 4 И появляется во времени раньше, чем сигнал на его первом входе, и сохраняется в течение небольшого промежутка времени. Максимально возможное значение этого промежутка времени вызвано зоной ожидания позиционного импульса, формирование которого -осуществляется триггером 5. Передняя граница зоны ожидания позиционного импульса соответствует нахождению соответствующего схвата транспортного механизма на некотором расстоянии от конкретного путевого упора (например, 28;) (фиг. 4), если счет вести но ходу движения транспортного механизма, а задняя - после путевого упора 28з. При нахождении соответствующего схвата транспортного механизма за пределами зоны ожидания позиционного импульса сигнал на втором входе элемента И 4 равен нулю. Ширина зоны ожидания позиционного импульса для каждого путевого упора 28 соответствующего схвата транспортного механизма может быть различной. Наличие сигналов на обоих входах элемента И 4 приводит к формированию сигнала на его выходе, который поступает на нулевой вход триггера 5, первый вход блока 7 сравнения и сбросовый вход счетчика 6 импульсов, причем триггер 5 переключается в состояние, когда на его выходе сигнал становится равным нулю, счетчик 6 сбрасывается в исходное нулевое состояние, а в блоке 7 сравнения изменяется на единицу значение двоичного К-разрядного числа, представляющего собой код текущего адреса соответствующего схвата транспортного механизма. На вторые информационные входы блока 7 сравнения поступают через коммутатор 2 из блока 8 ввода программ код адреса следования схвата транспортного механизма, представляющего также двоичное К-разрядное число, код режима работы соответствующего схвата, который включает признак направления движения схвата транспортного механизма, и код корректировки, представляющий разность между номерами схватов при работе в данный и предшествующий момент времени. Коды адреса следования и режима работы соответствующего схвата транспортного механизма записываются в триггерный регистр 17 блока 7 сравнения (фиг. 2), с которого двоичное К-разрядное число поступает на блок 23 сравнения кодов, а код режима работы соответствующего схвата - на дешифратор 18. Последний в зависимости от поступившей информации формирует сигналы направления движения, которые подготавливают реверсивный счетчик 22 для работы на вычитание или сложение, и сигналы корректировки текущего кода адреса следования схвата транспортного механизма, записываемые в регистр 20 сдвига. Передача сигналов корректировки осуществляется последовательно через элемент ИЛИ 21 в реверсивный счетчик 22 по сигналу с элемента 19 задержки. Если работа проходила по первому схвату, то с приходом кода корректировки.для работы вторым схватом значение текущего кода в реверсивном счетчике 22 изменится на единицу. В случае работы каким-либо другим схватом, значение текущего кода изменится на число единиц, равное разности между номерами работающего и закончивщего работу схватов. Скорректированный код текущего адреса с реверсивного счетчика 22 поступает на соответствующий вход блока 23 сравнения кодов. Ревультат сравнения выдается но второму и третьему выходам блока 7 сравнения. При этом, если код текущего адреса меньще кода адреса следования, то на втором и третьем выходах блока 7 сравнения сигналы равны нулю. Такое сочетание сигналов соответствует команде транснортному механизму для перемещения вперед. Если код текущего адреса больще кода адреса следования, то на втором выходе блока 7 сравнения сигнал равен нулю, а на третьем - единице, что соответствует команде транспортному механизму для перемещения назад. При равенстве указанных кодов на втором выходе блока 7 сравнения возникает сигнал в виде единицы, соответствующий останову транспортного механизма. Эти сигналы с помощью дещифратора 24 блока 9 управления приводом (фиг. 3) преобразуются в позиционные сигналы движения вперед или назад, а также останова, которые управляют работой реверсивного тиристорного пускателя 25. Кроме того, сигналы движения через элемент ИЛИ 26 используются для Запуска генератора 14 импульсов, а отрицательный фронт сигнала останова с элемента НЕ 27 подается на элемент задержки 11 и на второй вход регистра 10 для восстановления текущего кода работающего схвата транспортного механизма. В преобразователе 12 кодов, на первый вход которого поступает двоичный сигнал с выхода триггера 5, на третий вход - двоичный сигнал с третьего выхода блока 7 сравнения, на второй, вход - код текущего адреса схвата транспортного механизма с первого выхода блока 7 сравнения, матрица преобразования которого выбирается в зависимости от расстояния между путевыми упорами 28|п,формируется (К+ 2)-разрядное число, при этом первый (младший) разряд (К + 2)-разрядного числа формируется с помощью сигнала, поступающего с выхода триггера 5, второй разряд - с помощью сигнала, поступающего с третьего выхода блока 7 сравнения, а остальные разрядь представляют код текущего адреса схвата транспортного механизма. Преобразователь 12 кода осуществляет операцию преобразования кода (К + 2)разрядного числа в код нового р-раЗрядного числа, который соответствует передней или задней границе зоны ожидания позиционного импульса. При этом, если сигналы с выхода триггера 5 и третьего выхода блока 7 сравнения равны нулю, то код (K-f 2)-разрядного числа преобразуется в код р-разрядного числа, соответствующего передней границе зоны ожидания позиционного импульса для путевого упора, расположенного справа от соответствующего схвата транспортного механизма, т. е. при движении вперед. Если эти сигналы равны единице и нулю, то код (К + 2)-разрядного числа преобразуется в код р-разрядного числа, соответствующего задней границе той же зоны ожидания позиционного импульса. В случае, когда сигналы с выхода триггера 5 и третьего выхода блока 7 сравнения равны соответственно нулю и единице, то код (К+ 2)-разрядного числа преобразуется в код р-разрядного числа, соответствующего передней границе зоны ожидания позиционного импульса для путевого упора, расположенного слева от соответствующего схвата транспортного механизма, т. е. при движении назад. Наконец, если эти сигналы равны единице, то код (K-f 2)-разрядного числа преобразуется в код р-разрядного числа, соответствующего задней границе той же зоны ожидания позиционного импульса. Код передней или задней границы зоны ожидания позиционного импульса поступает на первый вход компаратора 13. Работу преобразователя кода поясним на следующем примере (фиг. 4). В этом случае путевые упоры 28 -23п левого схвата расположены, допустим, с левой стороны гальваноавтомата, а правого схвата - с правой стороны гальваноавтомата. Номера путевых упоров левого схвата соответствуют номерам путевых упоров правого схвата. Рассмотрим три соседних путевых упора 28,, 28 и 285 . Предположим, что путевой упор 28} , расположенный, например,слева от путевого .упора , находится на расстоянии от него в 60 межпозиционных импульсов,, а путевой упор 285, расположенный справа от путевого упора 28, находится на расстоянии в 100 межпозиционных импульсов. Предположим также, что передняя граница зоны ожидания позиционного импульса для путевого упора 28з, если текущий адрес транспортного механизма равен числу 4, расположена на расстоянии 55, а задняя - на расстоянии 65 межпозиционных импульсов, а для путевого упора 285 передняя и задняя границы зоны ожидания позиционного импульса расположены соответственно на расстоянии в 95 и 107 межпозиционных импульсов. Тогда щирина зоны ожидани позиционного импульса для путевого упора 28з равна 10, а для путевого упора 285- 12 межпозиционным импульсам. Код текущего адреса транспортного механизма соответствующего схвата, равный 4, должен быть преобразован в преобразователе 12 кодов
в код одного из следующих чисел: 95 или 107 при движении транспортного механизма вперед от путевого упора 28 к путевому упору 285 и 55 или 65 при движении транспортного механизма назад от путевого упора 284 к путевому упору 28}. В двоичном коде при К 5 и Р 7 число 00100 (т. е. 4) должно быть преобразовано в одно из следующих чисел: 1011111 (т. е. 95), 1101011 (107); 0110111 (55) или 1000001 (65). Поэтому к коду текущего адреса 00100 в преобразователе 12 кодов добавляются два младших разряда, значения которых определяются местоположением и направлением движения транспортного механизма, т. е. значением сигналов на выходе триггера 5 (для первого разряда) и на третьем выходе блока 7 сравнения (для второго разряда). Поэтому код текущего адреса в преобразователе 12 кодов становится равным одному из последующих чисел: 00100000, 00100001, 00100010 и 0010011. При этом код 00100000 соответствует коду передней границы зоны ожидания позиционного импульса для путевого упора 285, т. е. числу 1011111 (95). Код 00100001 соответствует коду задней границы той же зоны ожидания позиционного импульса, т. е. числу 1101011 (107). Код 0010010 соответствует коду передней границы зоны ожидания позиционного импульса для путевого упора 28з, т. е. числу 0110111 (55), и, наконец, код 0010011 соответствует коду задней границы этой же зоны ожидания позиционного импульса, т. е. числу 1000001 (65). При любом значении кода текущего адреса транспортного механизма преобразователь 12 кодов работает аналогично.
Генератор 14 импульсов, который запускается с помощью сигнала, поступающего на его вход с блока 9 управления приводом в момент, соответствующий началу движения работающего схвата транспортного механизма, вырабатывает последовательность межпозиционных импульсов, причем цена каждого импульса равна единице расстояния, а их общее количество пропорционально расстоянию, пройденному соответствующим схватом транспортного механизма. Эти импульсы поступают для подсчета на счетный вход счетчика 6 импульсов, поэтому на его выходе появляется код р-разрядного двоичного числа. Этот код поступает на первый вход компаратора 13. Если код равен коду передней границы зоны ожидания позиционного импульса, поданного на второй вход компаратора 13, то на его выходе появляется сигнал в виде единицы, который поступает на второй вход дешифратора 15, на первом входе которого в этот имеется с выхода триггера 5 сигнал, равный нулю. Указанное сочетание входных сигналов воспринимается дешифратором 15 таким образом, что на его выходе, подключенном к первому входу элемсчгш 16 vi появляется сигнал, равный едяпице. Н первом входе элемента 16 И также имеете/; сигнал от генератора 14 импульсов, почтиму на выходе элемента 16 И возникает , который переключает триггер 5 в состояние, когда на его выходе устанавливается сигнал единица, который подготавливает по второму входу элемент И 4 к работе. Теперь, если на первый вход элемента И 4 поступит позиционный импульс, то он произведет описанные операции в триггере 5, счетчике 6 импульсов и в блоке 7 сравнения, т. е. триггер 5 переключается в состояние, когда на его выходе сигнал становится равным нулю, счетчик 6 импульсов срабатывает в исходное состояние, а в блоке 7 сравнения изменяется на единицу значение текущего адреса соответствующего схвата транспортного механизма.
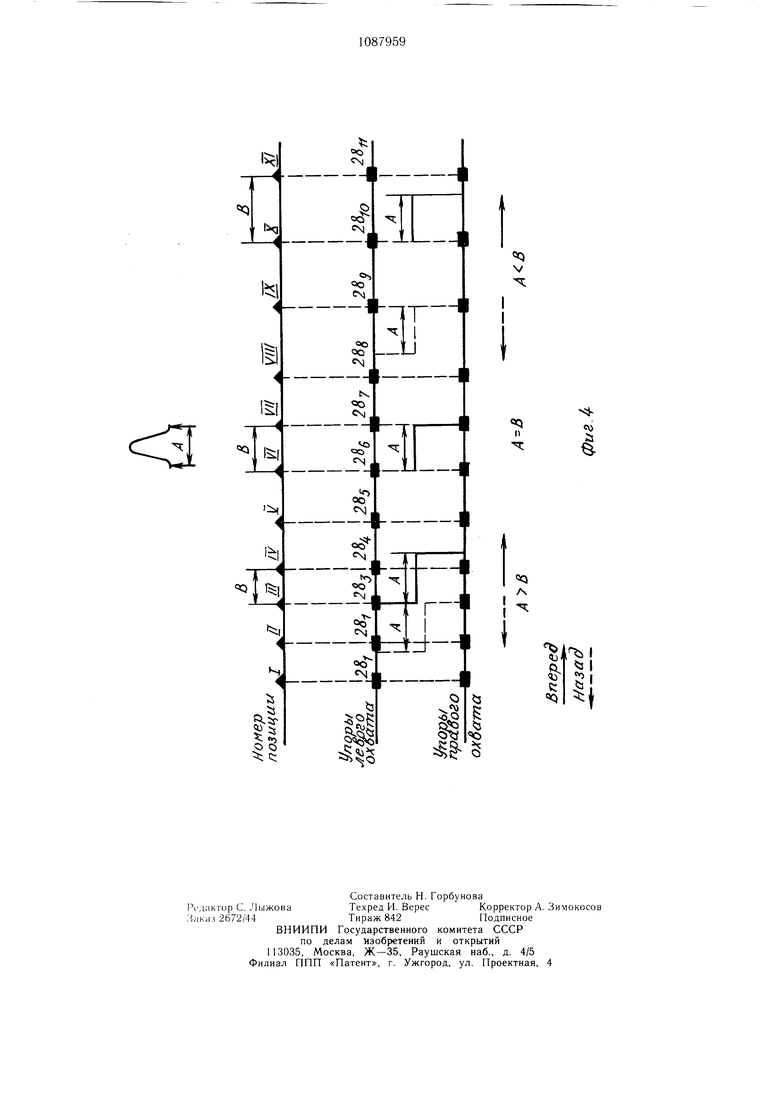
При различном щаге расположения путевых упоров 28t-28m с учетом базового расстояния схватов относительно друг друга возможны три случая прохождения транспортным механизмом указанных упоров. Для простоты рассмотрения ограничимся случаем двухсхватного транспортного механизма (фиг. 4).
Пусть А - базовое расстояние между схватами; В - переменный шаг расположения упоров 28i-28„.
1). В этом случае по моменту останова транспортного механизма левый и правый схваты будут находиться на обслуживаемых позициях VI, и VII, причем текущий код положения левого схвата отличается от правого на единицу, при этом код левого схвата равен «6, а правого - «7.
В этой ситуации возможно обслуживание сразу двух позиций VI и VII.
2). Для данного случая на момент останова транспортного механизма текущий код положения левого схвата отличается от правого на единицу, код левого схвата равен «3 (позиция III), а правого - «4 (позиция IV). При этом, если работа велась по левому схвату, то правый схват находится не на упоре 28/j. При смене направления движения (до указанной смены движение транспортного механизма осуществлялось вперед) и передаче управления правому схвату текущий код данного схвата до момента прохождения ближайщего упора уже изменился на единицу, т. е. произошла потеря единицы (код правого схвата на позиции III будет равен «2, хотя на самом деле он должен быть равным «3). Если работа осуществлялась по левому схвату при движении назад, то в момент останова код левого схвата отличается от правого на две единицы, так как правый схват еще не успеет осуществить наезд на упор 284. При смене движения в передаче управления правому схвату налицо появление лишней единицы. 3) . В этом случае в момент останова транспортного механизма текущий код поло кения левого схвата равен правому, поскольку правый схват в силу данного условия еще не прошел упор 28„. При смене направления движения (допустим движение транспортного механизма осуществлялось вперед) и передаче управления правому схвату текущий код данного схвата до момента прохождения ближайшего упора 28io уже изменится на единицу, т. е. произойдет потеря единицы. Аналогично при движении транспортного механизма назад в момент смены движения по неуправляемому схвату произойдет появление лишней единицы. Следовательно, в момент смены движения транспортного механизма при переходе на управление другим схватом имеет место потеря информации, что приводит к нарушению работы транспортного механизма, ведущему к. сбою технологического процесса. Для устранения указанных неопределенностей в данном устройстве используется регистр 10 и элемент II задержки. Запись инфор.мации в регистр 10 осуществляется по отрицательному фронту сигнала с второго выхода блока 9 управления приводом в момент останова транспортного механизма. При наезде датчика на один из упоров в (триггерный) регистр 10 записывается нулевая информация, а в случае нахождения его на одном из упоров 28j - 28m - единичная. По сигналу с элемента 11 задержки, поступающему на второй управляющий вход регистра 10, записанная информация проходит на первый информационный вход блока 7 сравнения. В указанном блоке единичные сигналы для случаев , добавляются или вычитаются в зависимости от выполнения предыдущих команд, восстанавливая истинное значение текущего кода для схвата транспортного механизма, по которому предстоит работать. Таким образом, истинное значение текущего кода схвата транспортного механизма корректируется для указанных случаев по моменту перехода на управление другим схватом при смене направления движения. Использование устройства обеспечивает более высокую надежность в работе при программном управлении многосхватным транспортным механизмом с различным расстоянием между путевыми упорами 28т. Указанное преимущество достигается введением дополнительных позиционных датчиков 1 -In по числу дополнительных схватов транспортного механизма, коммутатора 2, элемента 11 задержки и регистра 10, за счет которых исключается потеря информации, обусловленная сменой направления движения транспортного механизма при передаче управления неуправляемому схвату, что позволяет избежать нарушения хода технологического процесса.
20
7
f f
П
25
22
21

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1977 |
|
SU656024A1 |
| Программное временное устройство | 1990 |
|
SU1762298A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| УСТРОЙСТВО ПОИСКА ИНФОРМАЦИИ | 2014 |
|
RU2553093C1 |
| Специализированный процессор обработки данных | 1982 |
|
SU1062715A1 |
| МОДУЛЬ МУЛЬТИМИКРОПРОГРАММНОЙ СИСТЕМЫ | 1997 |
|
RU2116665C1 |
| Устройство для контроля электрических соединений | 1989 |
|
SU1633433A1 |
| Устройство для моделирования алгоритма деятельности человека-оператора | 1989 |
|
SU1621042A1 |
| Псевдостохастический анализатор спектра | 1985 |
|
SU1278885A1 |
| Устройство поиска информации | 2017 |
|
RU2656736C1 |

УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ МЕХАНИЗМОМ, содержащее блок ввода программы, первый датчик положения, элемент ИЛИ, соединенный первым входом с первым выходом дешифратора, а выходом - с первым входом первого элемента И, подключенного выходом к первому управляющему входу блока сравнения, к сбросовому входу счетчика импульсов и к нулевому входу триггера, связанного единичным входом с выходом второго элемента И, а выходом - с вторым входом первого элемента И, с первым входом преобразователя кодов и с первым входом дешифратора, подключенного вторым выходом к первому входу второго элемента И, соединенного вторым входом с выходом генератора импульсов и со счетным входом счетчика импульсов, подключенного выходом к первому входу компаратора, связанного выходом с вторым входом дешифратора, а вторым входом - с выходом преобразователя кодов, подключенного вторым входом к первому выходу блока сравнения, соединенного вторым выходом с первым входом блока управления приводом, а третьим выходом - с третьим входом преобразователя кодов и с вторым входом блока управления приводом, подключенного первым выходом к входу генератора импульсов, отличающееся тем, что, с целью повышения надежности устройства, в него введены коммутатор, вторые датчики положения, регистр и элемент задержки, подключенный входом к второму выходу блока с € управления приводом и к первому управляющему входу регистра, а выходом - к (Л второму управляющему входу регистра, соединенного выходом с первым информационным входом блока сравнения, а информационными входами - с выходами первого и вторых датчиков положения и с первыми входами коммутатора, подключенного вторым входом к выходу блока ввода программы, первым выходом - к второму вхо00 ду элемента ИЛИ, а вторым и третьим вы ходами - к вторым информационным входам блока сравнения. со 01 со
фиг. 2
J
26
фиг. 5
27
3
«Q
1
1
t
3C)
-tzid-;5
&I P
0
c:;
«Q V
4
xi
«Q
n
4
«M ol
5Q
A
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство программного управления передвижением подвижного объекта | 1972 |
|
SU474480A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для программного управления | 1977 |
|
SU656024A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
