Изобретение относится к машиностроению и может быть использовано в робото- технических комплексах.
Цель изобретения - упрощение конструкции.
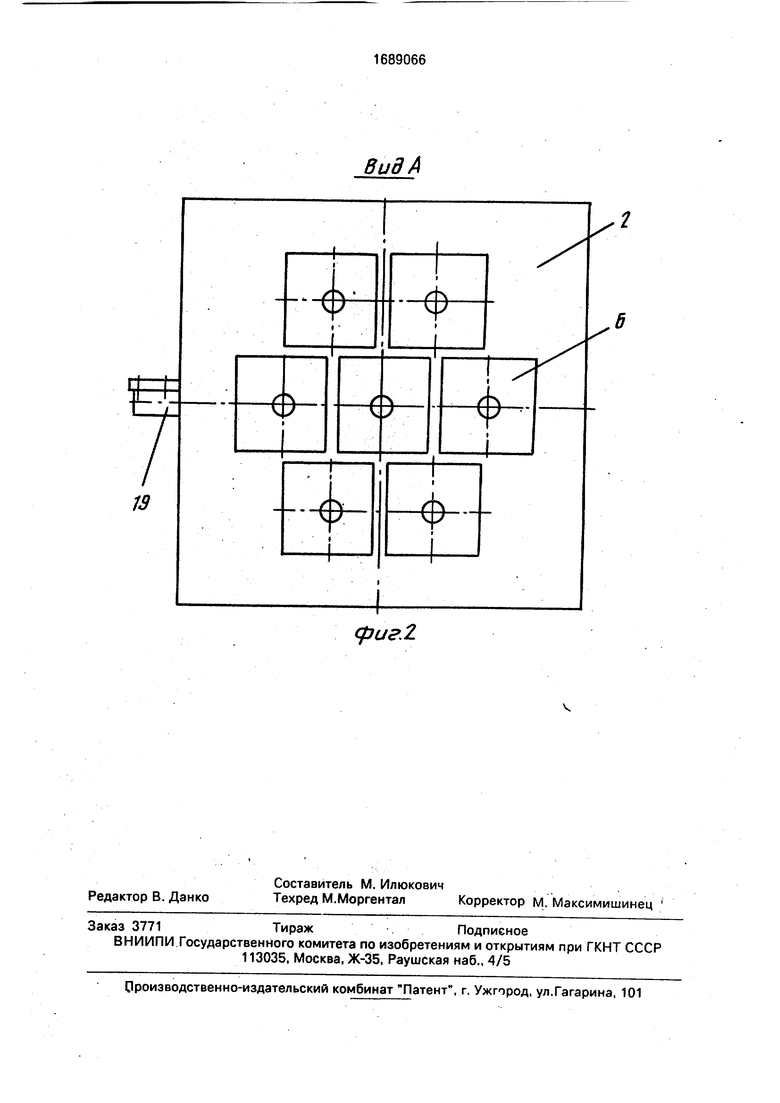
На фиг. 1 показан вакуумный схват, разрез; на фиг. 2 - вид А на фиг. 1.
Схват содержит полый корпус 1, в стенке 2 которого выполнены отверстия 3. В отверстиях 3 размещены патрубки 4, подпружиненные относительно корпуса 1 пружинами 5. Одним своим концом патрубки 4 закреплены на присосках 6, а другим концом - на эластичных оболочках 7, подпружиненных относительно корпуса 1 пружинами
8.На оболочках 7 размещена подвижная пластина 9, подпружиненная пружиной 10 относительно стенки 11 корпуса 1. На пластине 9 закреплен толкатель 12. На корпусе 1 установлена управляемая защелка, выполненная в виде одноплечего рычага 13, установленного на оси 14, пружины 15 и двуплечего рычага 16, установленного на оси 17. Элемент управления защелки представляет из себя упор 18, закрепленный на упругой ленте 19, жестко связанной с патрубками 4, Упругая лента 19 закреплена на стенке 20 корпуса 1 и свободно проходит в щель 21 стенки 22. Подвижная пластина 9 снабжена датчиком 23 ее положения относительно стенки 11 корпуса 1.
Схват работает следующим образом.
В исходном положении пружины 8 и пружина 10 уравновешивают положение пластины 9. Манипулятор перемещает схват таким образом, чтобы толкатель 12 упирался в опорный элемент, размещенный вне схвата. Толкатель 12 двигает пластину
9,сжимая пружины 8, до момента срабатывания управляемой защелки. Затем схват позиционируется на захватываемую деталь, и присоски 6, упираясь в поверхность детали, вместе с патрубками 4 перемещаются вверх.
При этом упругая лента 19, поднимаясь втягивается в корпус 1 и перемещает упор 18 вправо, Двуплечий рычаг 16 сдвигает одноплечий рычаг 13 влево, освобождая пластину 9. Пружины 8 раздвигают оболочки 7, что приводит к созданию разрежения в присосках 6. Деталь захватывается и переносится схватом. При этом положение пластины 9 относительно стенки 11 зависит от веса детали и от количества присосок, не имеющих плотного контакта с поверхностью детали, например, в силу наличия отверстий в детали Таким образом, показания датчика 23 позволяет сортировать детали по весу или по форме. Открепление детали происходит при контакте толкателя 12 и опорного элемента до момента срабатывания
управляемой защелки.
Формула изобретения
1.Вакуумный схват, содержащий полый корпус с размещенными в нем, подпружиненными относительно корпуса эластичными оболочками, полости которых соответственно связаны с полостями присосок, установленных на рабочем торце корпуса, отличающийся тем, что, с целью
упрощения конструкции, он снабжен размещенной в полости корпуса подпружиненной подвижной пластиной с толкателем, выполненной с возможностью взаимодействия с упомянутыми эластичными оболочками и с
дополнительно введенной управляемой защелкой, при этом присоски выполнены подвижными в осевом направлении, подпружинены относительно корпуса и кинематически связаны с элементом управления
упомянутой защелки.
2.Схват по п. 1, отличающийся тем, что пластина снабжена датчиком ее положения относительно корпуса.
3.Схват по п. 1,отличающийся тем, что присоски связаны с соответству-
щими эластичными оболочками через дополнительно введенные патрубки, установленные с возможностью осевого перемещения в отверстиях, выполненных на рабочем торце корпуса, а элемент управления защелки выполнен в виде упругой ленты, закрепленной на патрубках.
вид А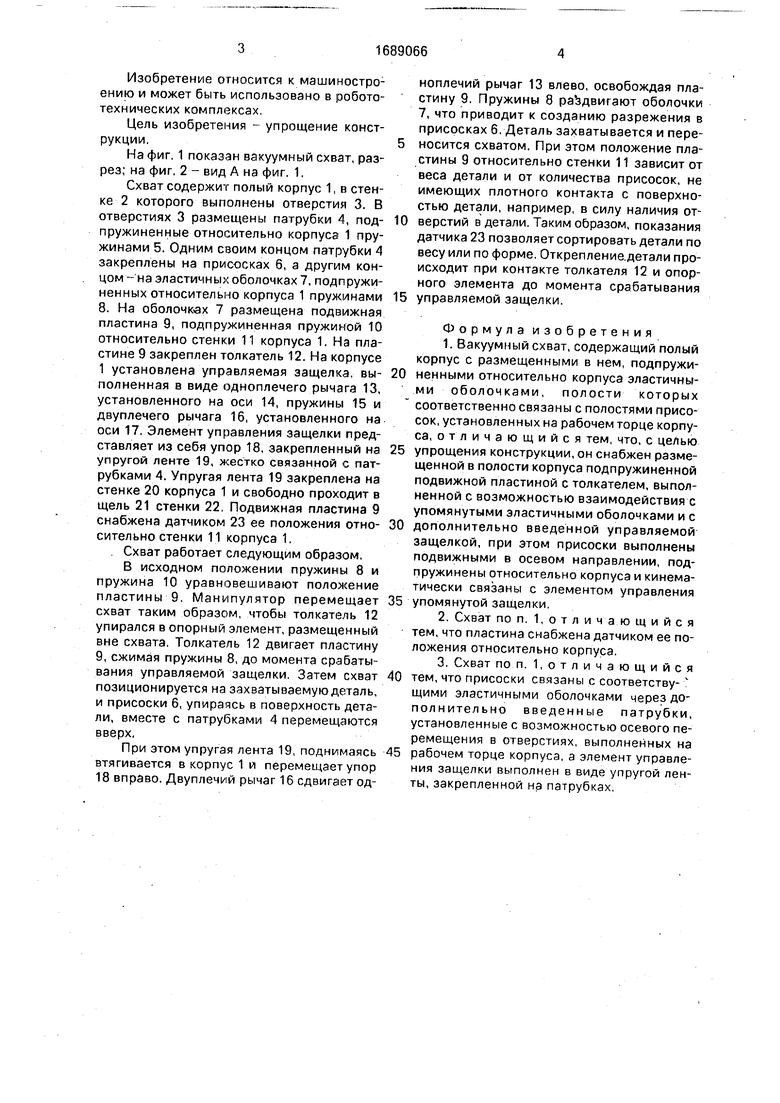
| название | год | авторы | номер документа |
|---|---|---|---|
| Головка манипулятора | 1990 |
|
SU1811485A3 |
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| Камера для фотосъемки на листовую пленку | 1980 |
|
SU1120275A1 |
| Устройство для поштучной подачи плоских изделий,преимущественно печатных плат | 1984 |
|
SU1264384A1 |
| Вакуумный захват | 1982 |
|
SU1058865A1 |
| МАГАЗИННОЕ ОРУЖИЕ С БОЕПРИПАСАМИ | 2005 |
|
RU2289773C1 |
| ИНВАЛИДНАЯ КОЛЯСКА | 2007 |
|
RU2373912C2 |
| Вакуумный захват перегрузочного устройства | 1983 |
|
SU1100213A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ПРОВОЛОЧНЫХ ИЗДЕЛИЙ СЛОЖНОЙ КОНФИГУРАЦИИ | 1992 |
|
RU2050216C1 |
| Устройство для удаления деталей из зоны обработки | 1988 |
|
SU1509160A2 |
Изобретение относится к машиностроению и может быть использовано в робото- технических комплексах. Цель изобретения - упрощение конструкции. Схват содержит полый корпус 1, в стенке 2 которого установлены подвижные патрубки 4, подпружиненные пружинами 5. Патрубки 4 закреплены 22 It IS на присосках 6 и на эластичных оболочках 7, подпружиненных пружинами 8. Подвижная пластина 9 подпружинена пружиной 10 и закреплена на толкателе 12. Пластина 9 в своем нижнем положении фиксируется управляемой защелкой, элемент управления коророй выполнен в виде упора 18, закрепленного на упругой ленте 19, закрепленной на патрубках 4. При работе схвата толкатель 12 двигает пластину 9. сжимая пружины 8, до срабатывания защелки. Схват устанавливается на деталь, при этом патрубки 4 поднимаются и лента 19 перемещает упор 18 вправо. Защелка освобождает пластину 9 и пружины 8 раздвигают оболочки 7, что приводит к созданию разрежения в присосках 6. 2 з п.ф-лы, 2 ил. Ё О с ю о о о 1/4 Фиг I
(риг. 2
| Схват манипулятора | 1984 |
|
SU1178588A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
