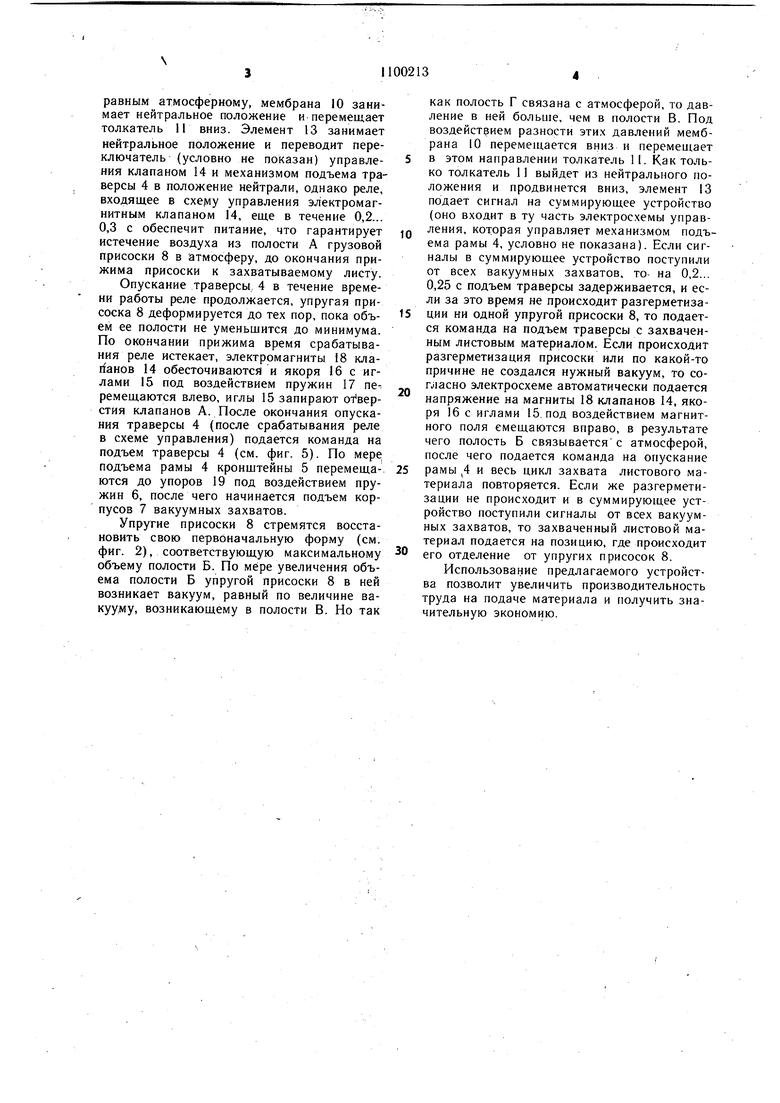
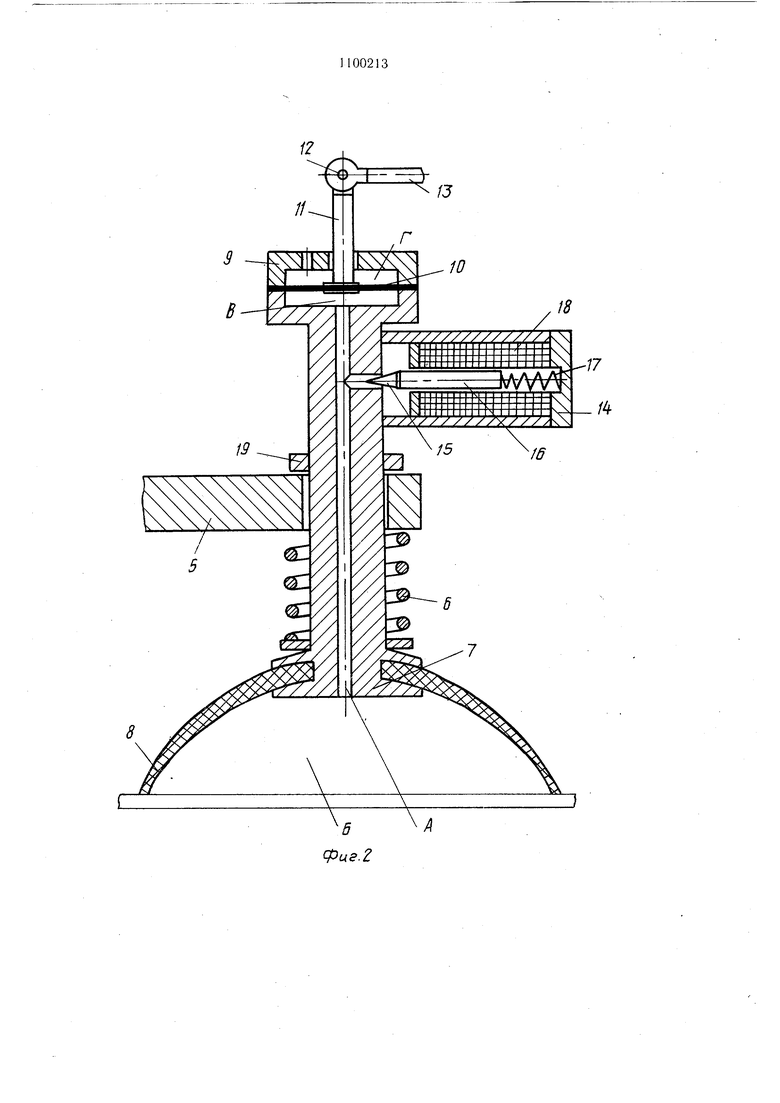
Изобретение относится к подъемно-транспортному машиностроению, в частности к вакуумным захватным устройствам. Вакуумный захват перегрузочного устройства, содержащий закрепленный на раме устройства корпус с эластичной присоской, полость которой посредством канала, выполненного в корпусе, соединена с атмосферой, и управляемый электромагнитный клапан для запирания указанного канала I. Основными недостатками такой конструкции являются следующие. Конструкция ненадежна в работе, так как не снабжена устройством для контроля вакуума в полости грузовой манжеты (упругой присоски); затруднительно с достаточной степенью надежности использовать несколько захватов такой конструкции для отделения из стопы и подачи одного, например металлического листа, так как невозможно проконтролировать во всех ли захватах создан вакуум. Цель изобретения - повыщение производительности путем обеспечения работы в автоматическом режиме. Поставленная цель достигается тем, что в вакуумном захвате перегрузочного устройства, содержащем закрепленный на раме устройства корпус с эластичной присоской, полость которой посредством канала, выполненного в корпусе, соединена с атмосферой и управляемый электромагнитный клапан для запирания упомянутого канала, корпус выполнен с дополнительной полостью, разделенной мембраной на две части, одна из которых соединена с каналом, а другая - с атмосферой, и подвижно установлен толкатель, один конец которого закреплен на мембране, а другой кинематически соединен с элементом управления электромагнитного клапана. На фиг. 1 изображен вакуумный захват перегрузочного устройства, общий вид; на фиг. 2 - то же, разрез в момент касания упругой присоски изделия (металлического листа); на фиг. 3 - вакуумный захват в момент срабатывания органа управления электромагнитным клапаном (находится в положении подачи напряжения на электромагниты клапана); на фиг. 4 - то же, в момент срабатывания органа управления механизма подъема. Устройство включает транспортную тележку 1, на которой с возможностью вертикального перемещения посредством зубчатых колес 2 и зубчатой рейки 3 установлена рама 4, где в кронщтейнах 5 подпружиненные посредством пружин 6 установлены корпуса вакуумных захватов 7 с упругими присосками 8. Корпус 7 имеет разъем, образованный с ним крыщкой 9, в котором установлена мембрана 10 с закрепленным на ней с одной стороны толкателем 11, каж дый толкатель посредством щтифта 12 связан с элементом 13 органа управления включением электромагнитного клапана 14 и механизма подъема траверсы, например, переключателем (условно не показан), имеющим по меньщей мере три позиции срабатывания - две крайних и нейтраль. Управление клапаном и механизмом траверсы осуществляется посредством электросхемы (условно не показана). Игла 15, закрепленная на якоре 16, подпружи.ненном пружиной 17, клапана 14 имеет возможность перемещения вместе с якорем 16 под воздействием магнитного поля электромагнита 18 и взаимодействует с отверстием в корпусе захвата 7, которое с помощью канала А сообщается с полостью Б упругой присоски 8. Посредством этого же канала А полость Б сообщается с полостью В, образованной с корпусом 7 мембраной 10, а полость Г, образованная мембраной 10 с крышкой 9, посредством отверстия сообщается с атмосферой (см. фиг. 2). На корпусе 7 установлен упор 19. Устройство работает следующим образом. Транспортная тележка 1 устанавливается над уложенным в стопу листовым материалом, корпуса 7 захватов под воздействием пружин 6 опущены до упоров 19, а иглы 15 запирают отверстие канала А. С пульта оператора подается команда на опускание траверсы 4, после примыкания упругих присосок 8 к отделяемому листовому материалу продолжается дальнейшее опускание траверсы 4 с корпусами захватов 7. В это время электромагниты 18 клапанов 14 обесточены и иглы 15 под воздействием пружин 17 запирают отверстие. По мере опускания траверсы 4 давление в полостях Б упругих присосок 8 возрастает (если в отделяемом листовом материале под полостью А нет трещин или отверстий), а так как полость Б посредством канала А в корпусе 7 сообщается с полостью В, то давление в ней также возрастает. Под воздействием этого давления мембрана 10 перемещается вверх, вытесняя воздух из полости Г и перемещает толкатель 11, связанный с элементом управления 13. Давление, необходимое для перемещения толкателя 11, невелико (порядка 500... 800 мм в ст.) и только часть воздуха переходит из полости Б в полость В при его создании. Как только толкатель 11 под воздействием мембраны 10 выйдет из нейтрального положения и подвинется вверх, он занимает положение, при котором включается та часть электросхемы управления, которая управляет клапаном 14. Подается напряжение на электромагнит 18 и под воздействием силового поля якорь 16 с иглой 15 перемещается вправо (см. фиг. 4) и канал А сообщается с атмосферой, как и полости Б и В, давление в которых выравнивается и становится
равным атмосферному, мембрана 10 занимает нейтральное положение и перемещает толкатель 11 вниз. Элемент 13 занимает нейтральное положение и переводит переключатель (условно не показан) управления клапаном 14 и механизмом подъема траверсы 4 в положение нейтрали, однако реле, входящее в схед1у управления электромагнитным клапаном 14, еще в течение 0,2... 0,3 с обеспечит питание, что гарантирует истечение воздуха из полости А грузовой присоски 8 в атмосферу, до окончания прижима присоски к захватываемому листу.
Опускание траверсы, 4 в течение времени работы реле продолжается, упругая присоска 8 деформируется до тех пор, пока объем ее полости не уменьшится до минимума. По окончании прижима время срабатывания реле истекает, электромагниты 18 клаliaHOB 14 обесточиваются и якоря 16 с иглами 15 под воздействием пружин 17 перемещаются влево, иглы 15 запирают ofBepстия клапанов А. После окончания опускания траверсы 4 (после срабатывания реле в схеме управления) подается команда на подъем траверсы 4 (см. фиг. 5). По мере подъема рамы 4 кронштейны 5 перемеща-. ются до упоров 19 под воздействием пружин 6, после чего начинается подъем корпусов 7 вакуумных захватов.
Упругие присоски 8 стремятся восстановить свою первоначальную форму (см. фиг. 2), соответствующую максимальному объему полости Б. По мере увеличения объема полости Б упругой присоски 8 в ней возникает вакуум, равный по величине вакууму, возникающему в полости В. Но так
как полость Г связана с атмосферой, то давление в ней больше, чем в полости В. Под воздействием разности этих давлений мембрана 10 перемещается вниз и перемещает в этом направлении толкатель 11. Как только толкатель 11 выйдет из нейтрального положения и продвинется вниз, элемент 13 подает сигнал на суммирующее устройство (оно входит в ту часть электросхемЕ5| управ- ления, которая управляет механизмом подъема рамы 4, условно не показана). Если сигналы в суммирующее устройство поступили от всех вакуумных захватов, то- на 0,2... 0,25 с подъем траверсы задерживается, и если за это время не происходит разгерметиза5 ции ни одной упругой присоски 8, то подается команда на подъем траверсы с захваченным листовым материалом. Если происходит разгерметизация присоски или по какой-то причине не создался нужный вакуум, то согласно электросхеме автоматически подается напряжение на магниты 18 клапанов 14, якоря 16 с иглами 15. под воздействием магнитного поля смещаются вправо, в результате чего полость Б связываетсяс атмосферой, после чего подается команда на опускание
5 рамы 4 и весь цикл захвата листового материала повторяется. Если же разгерметизации не происходит и в суммирующее устройство поступили сигналы от всех вакуумных захватов, то захваченный листовой материал подается на позицию, где происходит
0 его отделение от упругих присосок 8.
Использование предлагаемого устройства позволит увеличить производительность труда на подаче материала и получить значительную экономию.
5 фце.г
13
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1982 |
|
SU1058865A1 |
| Вакуумный захват | 1988 |
|
SU1705068A1 |
| Устройство для отделения от стопы и подачи листовых заготовок к обрабатывающей машине | 1982 |
|
SU1013045A1 |
| ОЧУВСТВЛЕННЫЙ ВАКУУМНЫЙ ЗАХВАТ | 2005 |
|
RU2283751C1 |
| Захватное устройство | 1988 |
|
SU1549893A1 |
| Вакуумный захват для листовых деталей | 1988 |
|
SU1640084A1 |
| Камера для фотосъемки на листовую пленку | 1980 |
|
SU1120275A1 |
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| Устройство для подачи плоских заготовок в зону обработки | 1986 |
|
SU1323183A1 |
| Противоподсосный клапан вакуумного грузозахватного устройства | 1984 |
|
SU1162725A1 |
ВАКУУМНЫЙ ЗАХВАТ ПЕРЕГРУЗОЧНОГО УСТРОЙСТВА, содержащий закрепленный на раме устройства корпус с эластичной присоской, полость которой посредством канала, выполненного в корпусе, соединена с атмосферой, и управляемый электромагнитный клапан для запирания упомянутого канала, отличающийся тем, что, с целью повышения производительности путем обеспечения его работы- в автоматическом режиме, корпус выполнен с дополнительной полостью, разделенной мембраной на две части, одна из которых соединена с каналом, а другая - с атмосферой, и подвижно установлен толкатель, один конец которого закреплен на мембране, а другой кинематически соединен с элементом управления электромагнитного клапана. (Л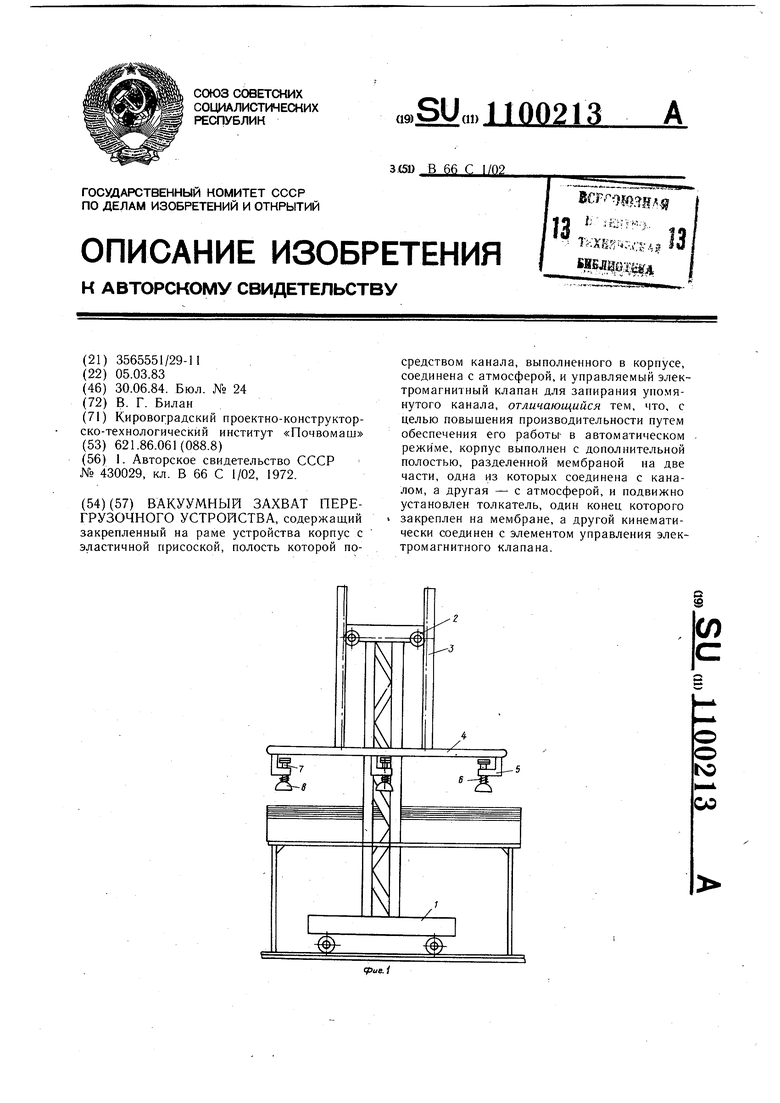
to
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 1972 |
|
SU430029A1 | |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
