ел
00 оо с:
01

| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1985 |
|
SU1281497A1 |
| Устройство для отделения верхнего листа от стопы и подачи его в зону обработки | 1981 |
|
SU965566A1 |
| Устройство для отделения от стопы и подачи листовых заготовок к обрабатывающей машине | 1982 |
|
SU1013045A1 |
| Вакуумный захват перегрузочного устройства | 1983 |
|
SU1100213A1 |
| Агрегат для изготовления грампластинок | 1984 |
|
SU1229069A1 |
| Устройство для подачи плоских заготовок в зону обработки | 1986 |
|
SU1323183A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОХОДНЫЙ ДОРОЖНЫЙ АГРЕГАТ, ДОРОЖНАЯ ПЛИТА И СКОРОСТНОЙ СПОСОБ СТРОИТЕЛЬСТВА ДОРОГИ | 2011 |
|
RU2485241C1 |
| Устройство для поштучного отделения плоских заготовок от стопы | 1988 |
|
SU1569062A1 |
| Вакуумный захватный орган | 1977 |
|
SU644579A1 |
| Устройство для перекладки листов из тары | 1988 |
|
SU1629258A1 |

ВАКУУМНЫЙ ЗАХВАТ, содержащий установленную подвижно относительно кронштейна подпружиненную траверсу с упором и присосными камерами, отличающийся тем, что, с целью повышения надежности работы, верхняя часть корпуса каждой камеры соединена с кронштейном посредством шарнирной тяги, закрепленной на корпусе со смещением к центру захвата, а захват снабжен установленным на наружной боковой поверхности каждого корпуса подвижным в вертикальнойплоскости стаканом, выполненньим с кольцевой про точкой на наружной поверхности, и размещенной в проточке ползушкой, .закрепленной посредством пальца на траверсе, при этом на кронштейне закреплены регулируемые упоры для взаимодействия с тягами с их наружной -стороны. (Л
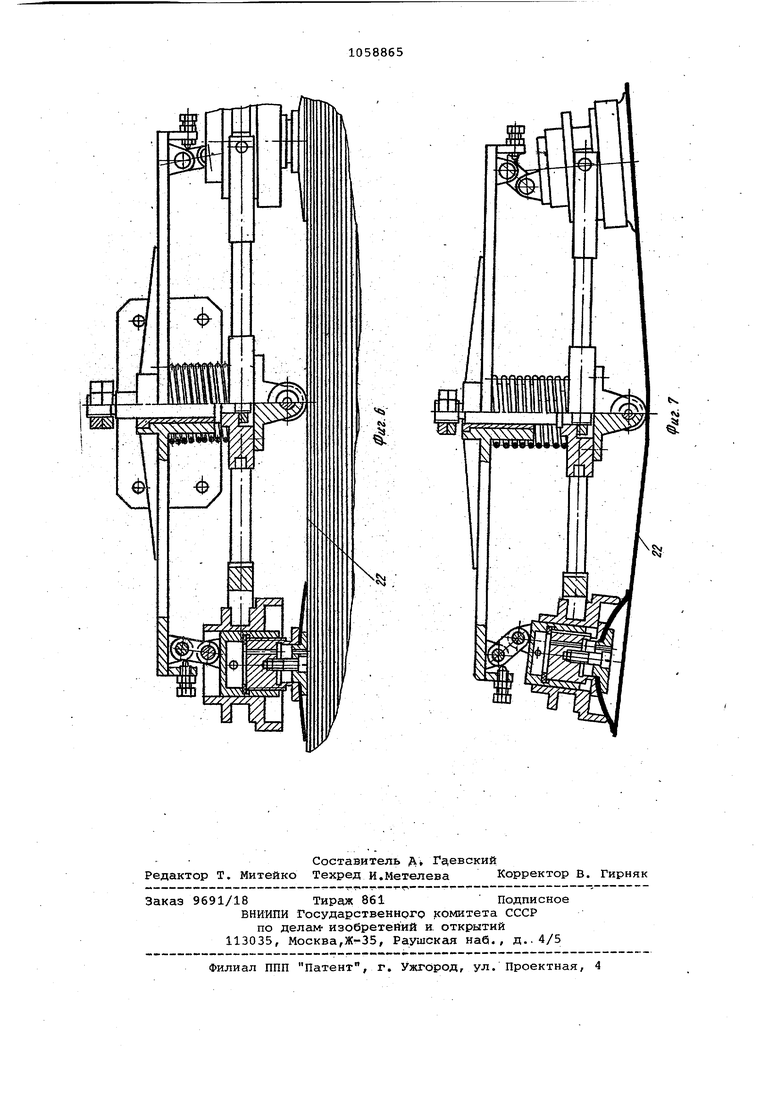
Фиг / Устройство -ОТНОСИТСЯ к машиностроению и может быть использовано в различных областях народного хозяй ства, в частности в робототехн 1ческих комплексах (РТК) автоматической штамповки деталей из листовых заготовок. . . Известно грузозахватное устройство, содержащее траверсу, q самоус танавливающимися вакуумными захватами закрепленными на концах балансиров у выполненных из упругого материала, которые посредством горизонтальных осей соединены с траверсой, которое может быть использовано для захвата листов из любого материала с перепадом неровности поверхности в предела максимальной подвижности балансиров 1 . Недостатком этого устройства является то,, что оно Не обеспечивает надежного отделения листа от пакета и не исключает подачи на технологическое оборудование вместе с захваченным верхним листом из пакета также и прилипшего к нему нижележащего листа. Наиболее близким к предлагаемому является вакуумный захват, содержащий установленную подвижно относител но кронштейна подпружиненную травер су с упором и присосными камерами, который обеспечивает возможность переналадки захвата на нескол ко типов деталей jjzj . Недостаток - Данное устройство Mo жет работать достаточно надежно толь ко с листами из эластичного материала, упругость которого невелика в сравнении с подъемной силой, присосок так как изогнутые упругие листы могут отрываться от жестко закрепленных присосок под действием усилия упругой деформации, поскольку контак тные поверхности присосок будут находиться по отношению к поверхности листа под некоторым углом. Целью изобретения является повыше ние надежности работы. Указанная цель достигается тем, что в вакуумном захвате содержащем кронштейн, установленную подвижно относительно кронштейна подпружиненную TjiaBepcy с упором и присосными камерами, верхняя часть корпуса каждой камеры соединены с кронштейном посредством шарнирной тяги, закрепленной иа корпусе со смещением к цен ру захвата, а захват снабжен установ ленным на наружной боковой поверхности каждого корпуса подвижным в вертикальной плоскости стаканом, шлполнеишлм с кольцевой проточкой на наружной поверхности, и размещенной в проточке ползушкой, закрепленной посредств 5м пальца на траверсе, при этом на кронштейне закреплены регулируемые упоры для взаимодействия с тягами с их наружной стороны. На фиг. 1 схематично изображено предлагаемое устройство, исходное положение; на фиг. 2 - то же, в момент его прижатия к стопе пластин; на-фиг. 3 - устройство с захваченной пластиной ; на фиг, 4 - устройстве, вид сверху; на фиг. 5 - разрез А-А на фиг. ; на фиг. б - предлагаемое устройство, разрез {момент его прижатия к стопе);.на фиг. 7 - то же, момент транспортировки захваче нной пластины. Устройство содержит кронштейн 1, закрепляе1Уий на транспортном агрегате, например на руке промышленного робота, траверсу 2 и присоски 3 Последние могут быть как подклю- ченными к источнику вакуума, так и выполнены самовакуумирующими. В средней части кронштейн 1 имеет бобышку 4 с направляющей втулкой 5, в которую вставлен подвижный шток б, соединенный с траверсой 2, находящейся под действием пружины 7. На траверсе 3 установлен роликовый отжимной упор 8. Корпуса 9 присосом 3 шарнирно закреплены на кронштейне 1 через тяги 10. Возможность разворота тяг 10 вокруг осей 11, закрепленных на кронштейне 1, в стороны, противоположные сЗтжимному упору 8, ограничена регулируемыми упорами 12, также закрепленными на кронштейне 1. На корпусе 9 каждой присоски подвижно посажен .стакан 13, в котором выполнен паз 1,4. Траверса 2 имеет вилки 15 с полёушками 16, свободно посаженными на пальцы 17, закрепленные на вилках 15, и вставленными в пазы 14 стаканов 13. Вакуумные камеры присосок 3 могут быть соединены трубками {не показаны } либо с источником вакуума {вакуумнасосом, эжектором и т.п. ) в случае использования присосок с принудительшам отсосом воздуха, либо с клапаном открытия доступа воздуха в присоски для разгрузки захвата от пластины после подачи ее на технологическое оборудование, .{на фиг. 5, б и 7 присоски 3 выполнены самовакуумирующими). В этих присоска}с .3 вакуум создаетсяпод резиновыми диафрагмами 18, закрепленными на седлах 19 посредством крышек 20, причем диафрагмы 18 взаимодействуют с нижними торцами стаканов 13. Для закрепления захвата на транспортном агрегате, например на руке промышленного робота, кронштейн 1 имеет фланец с привалочной поверхностью 21. УстрЬйство работав следующим образом. Кронштейн 1 со смонтированными на нем присосками 3 опускается на стопу пластин 22 (фиг. 2 и 5)под действием соответствующего привода транспортного агрегата, например привода подъема и опускания рук промышленного робота, и поднимается к стопе до упора, например в крышки 20. При этом вначале со стопой контактирует отжимной упор 8, поднимая траверсу 2 со штоком 6, перемещающимся по направляющей втулке 5,.сжимая пружину 7. Одновременно прДнимдются связанные с траверсой 2 через Вилки 15 с ползушками 16 стаканы 13, перемещгиощиеся по корпусам 9 присосок 3, освобождая диафрагмы 18, расправлякициеся по поверхности ас1хватываемой пластины 22. После это го привод подъема и опускания захват (йаходящийся на промышленном роботе) переключается на подъем.Отжимной упор 8, находящийся под действием пружины 7, остается на стопе пластин 22, а корпуса 9 присосок 3 с диафраг мами 18, связанные с кронштейном 1, поднимаются, перемещаясь по внутренним поверхност51М стаканов 13. Вследствие создающегося под диафрагмами 18 вакуума бйи присасываются к поверхности захватываемой пластины 22 поднимая ее и изгибая относительно. отжимного упора В. При-этом корпуса 9 присосок 3 вместе со стаканами 13, sep/ofitae захваченной пластиной 22 ,раз орачиваются относительно кронштейн I за счет, тяг 10, самоустанавливаяс tio изогнутрй поверхности пластины 2 а ползушкй .16 перемещаются по пазам 14 стакайов 13 и поворачиваются ма пальцах 17 йилок 15 .аграверсь 2. СцеФормированная пластина 22 отделяется от стопы, поднимается вместе с захватом и подается трансрортным агрегатом (промышленным роботом) на технологическое оборудование.Отделение пластины 22 от захвата в 10 5. рабочей зоне технологического оборудования осуществляется открытием доступа воздуха в присоски 3 с помощью клапана (не показанного),связывающего вакуумные камеры присосок 3с атмосферой. Предотвращение отрыва транспортируемой пластины 22 от захвата под действием момента сил, откидывающих присоски 3 на поверхности пластины 22, осуществляется регулировкой упоров 12, изменяющих исходные и конечные положения тяг 10 относительно мертвых точек,т.е. сведением срставлякнцих от действия тяг 10 на присоски 3, опрокидывающих присоски 3 на поверхности пластины 22, к необходимому . Предлагаемое устройство позволяет осуществлять подачу на технологическое оборудование с использованием различных транспортных агрегатов (например про1«8лшленных Еоботов) упругих пластин .из стопы, содержащей слипшиеся по причине наличия на их поверхности масел, грязи и т.п. пластины, с высокой надежностью их отделения, т.е. с предотвращением подачи на технологическое оборудование более одной заготовки, следствием чего может -быть выход из строя оборудования и оснастки (например поломка дорогостоящих штампов и выход из строя прессов в листовой штамповке). Таким образом, использование предлагаемого захвата сокращает затраты на восстановление штамповочного оборудования, вышедшего из строя по причине подачи в него вместе с верхней захваченной из стопы заготовкой прилипшей к ней заготовки нижележащей, а также повышет производительность основного оборудования за счёт сокращения потерь времени на его восстановление.
-вт
22
фаг. 2
0-4
1
4-нв
0vt. 3
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Грузозахватное устройство | 1978 |
|
SU712361A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР 759443, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
